基于毫米波雷达的纯电动汽车自适应巡航系统设计
2022-06-11杨冰非施卫
杨冰非 施卫
摘要:自适应巡航控制是现代车辆电子系统的关键构成。在路况复杂多变的道路上,自适应巡航控制系统可以有效帮助驾驶员操控车辆,提高行车安全。因此,自适应巡航控制系统的附加作用受到广泛关注。目前针对基于毫米波雷达的纯电动汽车自适应巡航控制的研究不多,因此,该文将重点介绍基于毫米波雷达的纯电动汽车自适应巡航控制系统,该系统可在距离控制模式和速度控制模式之间自动切换,识别前方目标并实时跟踪,在保持安全距离的情况下提供车辆自动巡航功能。
关键词:毫米波雷达;自适应巡航;纯电动汽车
中图分类号:TP311 文獻标识码:A
文章编号:1009-3044(2022)13-0138-03
自适应巡航系统是一种新型的车辆驾驶辅助系统,它结合了安全距离跟踪和速度控制,可以提供车辆跟车巡航功能。如果车辆前面没有目标车辆,自适应巡航控制系统将以驾驶员设定的恒定速度行驶,类似于传统的巡航控制系统[1]。当自适应巡航控制系统发现前方有车辆时,巡航系统进入跟车模式,自动跟随前方的目标车辆,同时保持安全距离[2]。自适应巡航系统可以调整车速以提高驾乘舒适度。目前关于自适应巡航系统的研究主要集中在燃油车上,关于基于毫米波雷达的纯电动车自适应巡航系统的研究不多,而随着污染和能源短缺的日益加剧,以纯电动汽车为代表的新能源汽车将逐渐成为出行的首选,因此,研究纯电动汽车的自适应巡航系统具有非常重要的现实意义。
1 系统功能原理
自适应巡航系统是现阶段大部分车辆的标配安全系统,该系统将传统的恒速巡航控制与碰撞警告相结合,在车辆行驶过程中可以保持车辆与前车之间的合理距离,实现自适应巡航功能[3]。自适应巡航系统通过电子油门驱动结构、速度传感器控制车辆以接近驾驶员设定的固定速度行驶。随着电子技术、传感器的发展和应用,自适应巡航系统在现有巡航控制系统的基础上增加了雷达、有线驱动器和相关控制策略等组件。毫米波雷达传感器测量车辆的相对距离、车辆的相对速度等信息,并通过现场总线将测量数据发送到自适应巡航控制系统[4]。自适应巡航系统使用雷达测量的信息来确定前方是否有车辆,进而选择不同的驾驶模式。无论是保持车间距离还是匀速前进,自适应巡航系统都会根据控制算法向相应的执行器发出加速和制动指令,控制车辆速度。但是,该系统不适用于车辆数量多、交通不便的道路情况。
2系统总体设计
2.1系统技术要求
1)选择毫米波雷达传感器的型号时需要先分析雷达数据,探讨雷达捕捉目标的有效方法。
2)系统在跟车时从多个目标中识别和评估有效目标。
3)跟车模式下系统通过控制速度与前车保持恒定安全距离。
4)系统能有效处理突发情况,如系统故障。
2.2系统控制方案
1)选用德国Continent 77GHZ MMW ARS408毫米波雷达,将毫米波雷达置于车辆中央,在误差范围内确定雷达位置和角度。雷达数据通过现场总线网络传输,按照现场总线编码格式编写现场总线网络通信报文,对雷达数据帧进行二级制转换。
2)雷达目标信息采集分析完成后,对信号进行滤波,将车辆行驶时预期路线中心的全车道区域作为雷达的有效目标区域。考虑车内和雷达坐标系设置,按照车道内直线距离最短的原则评估前方有效目标。可以使用坐标信息进行逻辑判断,确定车辆与前方车辆是否在同一车道上。假设车辆长时间处于车道中间,车辆行车车道可分为y1、y3,车辆中心与前方车辆中心的横向距离y0,根据这三个参数确定车辆所处车道。
3)基于车辆之间的距离和前方车辆的速度,系统分为速度控制模式和距离控制模式。将策略切换到自适应巡航系统的运行模式,以确定自适应巡航车辆所需的加速度或速度。下位控制器根据上位控制器要求的预期加速度向发动机控制单元、制动控制单元、能量回收控制单元等发送指令,提供实际加速度跟踪和反馈,让汽车保持预期的加速度。
4)当系统出现故障时,触发报警,错误显示闪烁,驱动器主动切换到手动控制模式。
2.3系统结构
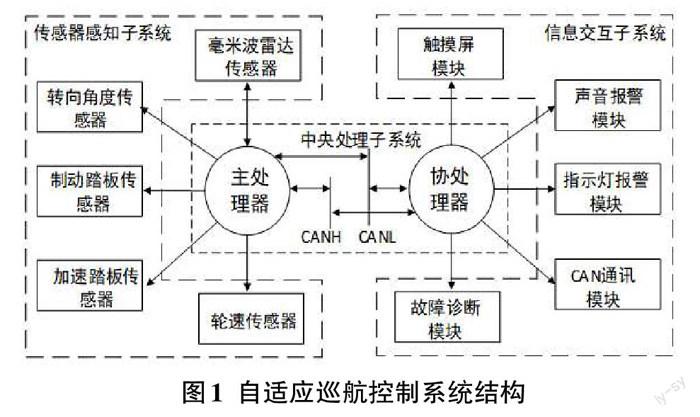
图1为自适应巡航控制系统结构图。整个系统由中央控制子系统、通信子系统、传感器子系统构成。中央控制子系统由信息采集单元、主控单元组成,主要作用是输出整车运行状态控制指令。通信子系统主要包括声光报警、触摸屏等部分,旨在实现有关车辆运行的各种信息的传输与呈现。传感器子系统包括转向角传感器、雷达传感器、轮速传感器、加速传感器、制动传感器等各种传感器,主要作用是采集车辆的速度、车距等相关参数[5]。
系统采用主从处理器设计方案。主数字信号处理器(Digital Signal Process,DSP)虽然具有强大的数值算法能力,但不擅长规划任务。因此,主DSP处理器和从处理器进行目标提取、目标跟踪等各种毫米波雷达相关的数值计算。从处理器STM32主要处理以下任务:作为与DSP的数据交换、阈值设置、人机交互、评估和报警。
车前保险杠部位设置的毫米波雷达可以实时采集车距、两车相对速度等参数信息并通过现场总线网络同步发送到主处理器。使用连接到电机输出的霍尔速度传感器。输出与接收轴和转轴转速相同的脉冲信号给主处理器计算车速。刹车和油门位置以开关的形式输入主处理器,以处理各种传感器。它提供信息并将处理结果发送到从处理器。协处理设备评估当前行车安全状态并接管相应的控制策略,并对电动机控制单元、制动器控制单元、能量回收控制单元等发出指令。
3系统硬件设计
3.1主处理单元设计
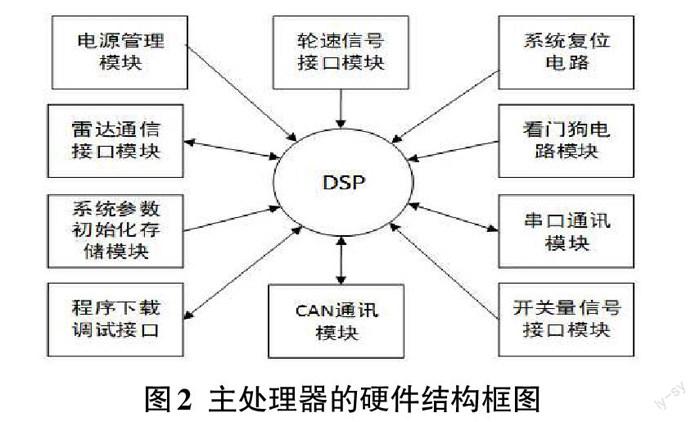
主处理器控制系统电路的设计需要满足雷达信号处理与控制系统的硬件要求。硬件系统主要包括DSP处理器、现场总线通信、程序调试接口、各种传感器信号接口、串行通信、电源管理、复位电路、看门狗电路和开关信号接口等模块。
电源管理模块负责为整个工作单元和毫米波雷达传感器供电。看门狗电路主要用于抑制干扰,有效保证系统的稳定运行。初始化模块负责存储与相关车辆参数,通过存储多种车型车辆参数来提高系统的适用性。当系统开始运行时,主处理器DSP从初始化模块中读取参数值;轮速信号接口与霍尔速度传感器连接,处理传感器的脉冲信号并将其转换为车速值,串行雷达通信接口模块独立SJA1040现场总线控制器、6N137高速光电传感器、现场总线收发器PCA82C250通。另外,测距雷达负责将处理后的数据信息发送给协处理。设备的控制单元。串行通信接口主要作用是将单片机的TTL电平转换为USB标准电平,与传感器或PC机交换信息;主DSP控制器[6]通过现场总线网络通信接口接收毫米波雷达传来的车辆真实距离和相对速度信息,处理速度传感器的脉冲信号,计算真实速度、刹车踏板、油门踏板、转向角,实时了解道路表面附着系数和其他信息;各种处理后的数字参数信息通过现场总线网络通信接口发送到从处理器控制单元。图2为主处理器的硬件结构框图。
3.2 从处理单元设计
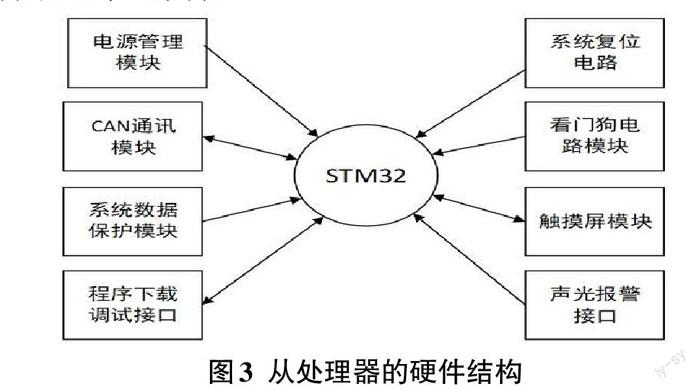
从处理器硬件电路包括现场总线通信、程序调试接口、各种传感器信号接口、串行通信、电源管理、复位电路、看门狗电路、开关信号接口等模块、STM32微处理器[7]。
从处理器收到主处理器DSP传来的指令后将对车辆的运行状态进行分析,接管相应的控制策略,状态分析结果通过触摸屏、声光报警等方式输出,同时基于需要显示各种车辆的状态信息,帮助司机安全驾驶。如果系统程序有错误,则会显示系统错误信息。此外,从处理器控制单元通过现场总线通信接口将各种系统参数信息发送给其他车载电子控制单元。图3为从处理单元结构。
3.3电源模块
图4为系统电源模块结构框图,系统选用LMZ23605、TPS795901、TPS78601电源芯片。LMZ23605芯片的输入电压为12V或24V。一旦芯片运行可以产生5V的电压,再通过TPS795901电源芯片、TPS78601电源芯片转换为3.3V、2.5V、1.2V,以匹配系统的多种工作电压需求。
3.4通信模塊
车辆自适应巡航控制系统必须通过现场总线网络与其他车载电子设备进行通信。现场总线是一种低波特率串行通信协议,主要用于描述设备间信息传递的方式。现场总线网络通信的每一层与不同设备上的同一层进行通信。实际的通信只发生在相邻的两个设备层,设备通过模型物理层的物理环境相互连接。现场总线网络定义了OSI模型的数据链路层和物理层,用户可以自由定义应用层的协议。系统现场总线通信控制器采用飞利浦TJA1040,DSP提供现场总线通信接口,用于与车内其他电子设备进行通信,只需外接电平转换器IC即可实现现场总线通信。图5为现场总线通信控制器TJA1040电路图。
4系统软件设计
本次设计将系统拆分成多个模块,按功能分为四层(底层模块、信令层模块、应用层模块、算法层模块),系统软件结构框图如图6所示。
1)底层模块主要初始化主处理器DSP和STM32从处理器功能模块,控制系统参数初始化模块、毫米波雷达接口模块、现场总线通信模块、DMA直接数据模块、时钟模块、中断模块、定时器输入数据采集模块、系统时间定时器模块等。
2)信号层模块用于在应用层和底层软件之间传输数据。
3)应用层模块包括主系统程序和错误检测程序。
4)算法层模块是整个软件系统的核心,提供车辆信号处理和纵向控制。
5结束语
综上所述,自适应巡航控制系统可以在跟踪车辆的同时控制车辆的速度,直接影响乘坐质量、车辆性能和车辆经济性。本文详细介绍了基于毫米波雷达的纯电动车自适应巡航系统中的软硬件设计和控制算法,提出以DSP为主处理器,STM32为从处理器,基于现场总线网络进行通信传输,通过毫米波雷达检测前方车辆目标和车间距离的设计方案,可以有效提高纯电动车的自适应巡航系统应用效果。
参考文献:
[1] 王丽瑶.电动汽车充电技术综述[J].时代农机,2019,46(7):96-97.
[2] 杜悦英.智能汽车浪潮来袭[J].中国发展观察,2018(13):44-46.
[3] 周超,陈荣利,袁洁.汽车智能化系统的应用现状及展望[J].电子技术与软件工程,2019(11):118-119.
[4] 曹俊杰,陈实,茅君泽,等.雷达在汽车主动安全系统中的应用[J].汽车与配件,2012(45):27-29.
[5] 何班本,文翊,刘帅.高级驾驶辅助系统(Level 2)开发研究[J].汽车文摘,2020(12):48-53.
[6] Xiao L Y,Gao F.A comprehensive review of the development of adaptive cruise control systems[J].Vehicle System Dynamics,2010,48(10):1167-1192.
[7] Peppard L.String stability of relative-motion PID vehicle control systems[J].IEEE Transactions on Automatic Control,1974,19(5):579-581.
【通联编辑:代影】
