基于4G网络的地铁列车定位系统开发设计
2022-06-10李诺祁振鹏杨佳卫
李诺,祁振鹏,杨佳卫
(南京铁道职业技术学院,江苏南京,210031)
0 引言
中国现代化的高速地铁,都是使用基于通信的列车自动控制系统来进行定位,以此确保列车行车安全。系统相关的设备如果发生各种故障或者供能的问题,列车与地铁控制中心的通信便会中断,之间的传输信号也将停止,这个时候各个传感器之间无法正常通信与数据汇总。在这个时候,就无法与列车取得通信,也无法通过系统收到列车的准确位置和行进状况,就会很容易发生列车追尾等事故。
所以要制作一种冗余定位系统,在原有系统管控之外,可以作为安全保障,来确保地铁在自动控制系统或设备故障断电时可以及时重新获取地铁列车的位置和运行速度,这对于人民安全乘坐地铁出行具有重要的意义。
1 确定定位主系统
基站定位系统通过各种运营商的网络来获取用户的位置信息,大多用于手机定位。基站定位主要原理如下:使用通信设备如手机,接收来自其他运营商基站的下行导频信号,根据信号的状态来获取这些基站下行导频TOA(TimeofArrival到达时刻)或TDOA(Time Differenceof Arrivalm到达时间差),依据得到的这些数值与这些信号来源的基站具体坐标,通过距离位置算法例如三角公式,综合运算得出终端设备的具体位置信息。
一般来说,计算移动设备实际空间位置的算法,需要通过与多个基站间的距离参数来定位,正常情况下,使用的基站数目,与移动设备的定位精确度是有正比关系的。基站定位依靠的是通信基站的信号传输,移动通信技术从2G一直到现在高速发展的5G,诞生了多种技术,例如GSM、LTE和NR等。
基于TDOA的定位距离算法:是根据多个基站收到相同信号时间不同产生的差值,来计算出目标的坐标。TDOA为了得到时间差,需要有节点去传输不同速度的信号,其他节点收到发送来的信号,就得到不同信号的到达的时间差,由已知这些信号的传输速度再根据到达时间差,便可算出节点之间的距离,得到不同节点的距离通过算法就能得出节点的具体坐标。DOA定位对于现在是地铁上的定位的意义在于不需要过高的网络要求,并且精度较高。各种不同的移动通信系统基本都可以适用TDOA技术,尤其适用于CDMA系统。把传输信号的进行扩频操作,以得到更宽的频谱范围,是CDMA系统所运用的方式,这可以让整个系统更好的减弱多径效应带来的干扰。CDMA系统是一种非功率的敏感系统,正常情况下信号的衰落对精度带来的影响偏小。但是因为有功率控制的影响,再基站周围一定范围内的发射信号功率会受影响变小,这样就导致相邻的另一基站收到的功率也会变小,这就会导致了更大的定位误差。最终选用TDOA测距技术作为定位技术。
2 仿真
2.1 算法介绍
Chan算法是TODA定位的一种有效算法,与Fang算法类似属于非递归双曲线方程组解法,能够通过求解表达式得到一个解析表达式解。此算法的特点是当测量的误差值呈常态分布时,算法的定位精度高、求解简单,而且可以通过增加基站的方式使定位的精度更高。测量误差为零均值高斯随机变量是Chan算法推导的基础,对于误差值较大的测量值,该算法的性能会有显著下降。在二维情况下,Chan算法只有两种情况,三个基站参与定位和三个以上基站参与定位。
2.1.1 三个基站参与定位
三个基站参与定位如图1所示,移动台为MS,固定基站为BS接收来自MS的信号。

图1 三个基站于移动台的位置关系
BS1等基站的坐标已知,为假设第i个基站位置为(x1,y1)、(x2,y2)、(x3,y3)。假设第i个基站位置为(xi,yi)。把移动台MS的位置设为(x,y)。此时设BS1为固定站,所以距离差的基准都是以BS1为准。
根据几何关系可以确定下面的表达式:
通过代入化简,并经过一系列计算可得到MS的估计坐标:

2.1.2 多个基站参与定位
当基站数量大于3时,TDOA值要想得到更为精确结果,那么通过测试得到的非线性方程组个数就必须要多于未知变量的个数。为了使Chan算法获得更好的MS所在的位置估计,使用加权最小二乘法,可以使测量时的冗余数据得到充分的使用,同时就能使得到的MS位置估计变得更加精准,提高定位精度,使精度达到100m左右。接着在用两次加权最小二乘法使得到经过改进后的坐标估计。
第一次WLS:
当移动台与基站距离较远时,可近似为:

第二次WLS:

当移动台与基站距离较远时,可近似为:

最终移动台定位的结果为:

2.2 直线轨道仿真
直线轨道仿真加入了适当的高斯白噪声,考虑到基站辐射的范围各不相同,轨道方向为X轴方向,基站分别设立在轨道两旁平行于X轴如图2所示。X的坐标精度远大于Y坐标的精度。在直线轨道仿真中测试了多组数据,列车速度分别为16m/s, 32m/s, 64m/s, 128m/s, 256m/s时列车定位估算位置,并计算出标准差以及方差,标准差如图3所示,方差如表1所示。
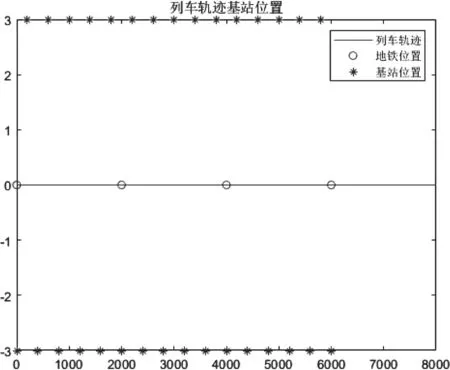
图2 直线轨道以及基站设定示意图
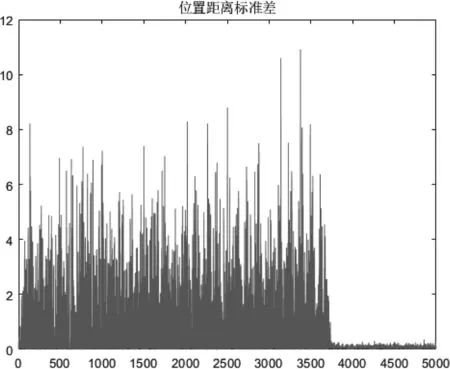
图3 位置距离标准差

表1 直线轨道定位方差
以上为测试噪声为0的情况下列车定位的坐标,下面将噪声加入仿真软件,分别测试了当信号能量归一化时,噪声方差为1,2,3,4,5时的数据,发现噪声越大的时候定位的标准差越大,即噪声越小定位越准确。
图4-图6为测试噪声时的位置标准差。

图4 噪声为1时定位方差图

图5 噪声为2时定位方差图
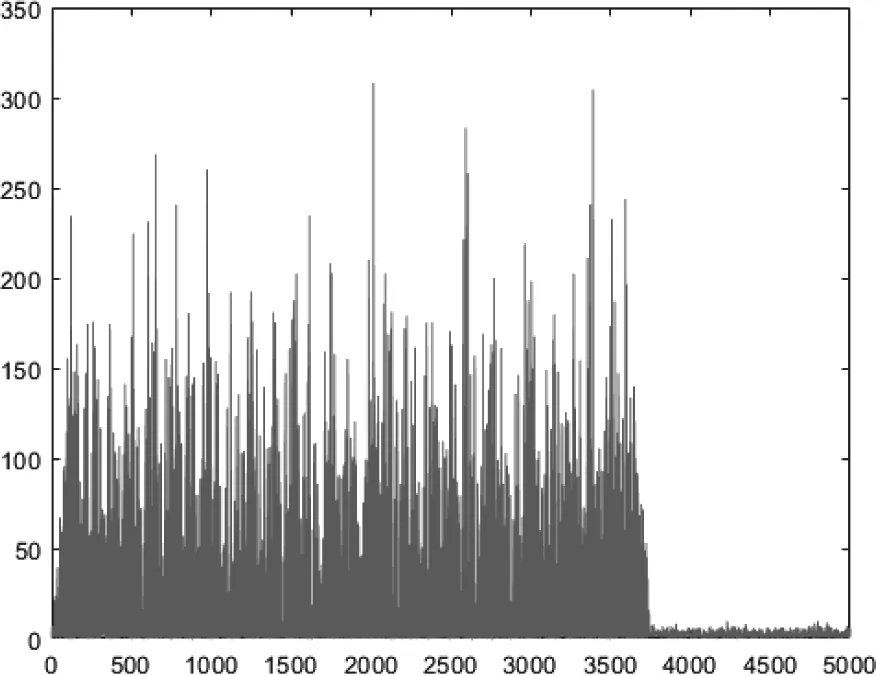
图6 噪声为3时定位方差图
由定位标准差图像可以看出,当噪声越大的时候,Y轴标准差越大,也就是定位精度越低,由此可以得到在进行定位时,就要将噪声因素考虑进去,需要对噪声做进一步处理,将噪声的干扰减小到最小才能够获得更精确的位置信息。
(1)由于基站的布置状况基本与列车运行轨道相平行,基本成直线型,在Y轴定位坐标的精确度上会产生较大影响。不过对于地铁列车定位来说,该误差可以忽略不记,因为在地铁列车直线轨道仿真中,列车行驶的轨道一定是已经设定好的直线轨道,在定位时,只需要X轴的定位精确度达到即可确定列车位置,并对列车运行安全进行监测。
(2)在设计实际列车定位系统时要考虑到多普勒效应对列车定位精度的影响,不过由于列车速度相对与电磁波的速度来说要慢很多,所以多普勒效应对定位精度的影响很小,几乎可以忽略不记。在仿真时列车的运行速度已经达到了256m/s,实际地铁车的运行速度是远远达达不到这个速度的,所以对于仿真结果来说几乎没有影响。因为电磁场的传播速度远远大于列车运行速度。
(3)Y轴误差大的缘由主要是轨道是按直线型布置,而基站也只是沿着轨道两旁进行布置,并且与轨道相平行,也为直线型排布,而Y轴上的基站布置却少之又少,引起Y轴的定位精度不够准确。
3 硬件系统设计
硬件各部分组装框图如图7所示,安置固定在3D打印外壳内如图8所示,使定位装置便于携带安装。硬件上电,测量稳压模块的输入输出电压,电压正常。烧入测试程序,程序写入正常,LCD模块显示当前位置经度和纬度,则判断SIM7600CE工作正常。
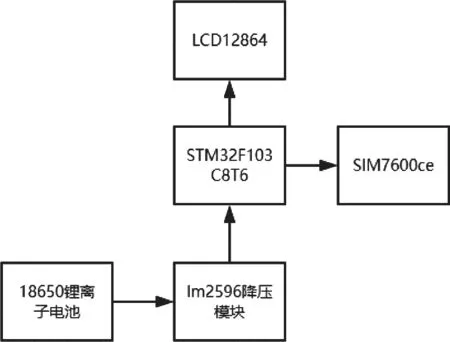
图7 硬件系统框图
STM32单片机负责驱动定位芯片SIM7600CE,及其处理定位信号并上传至服务器。SIM7600CE与STM32芯片间的数据交互是通过串口发送AT指令来完成。定位芯片SIM7600CE在STM32的控制下连接基站获取定位信息。控制LCD显示屏显示当前经纬度以及系统工作状态。电池与降压模块给系统提供合适的工作电压电流。
定位模块安装后见图8,红色开关为电源开关,黑色圆点为锂电池充电接口。

图8 硬件实物图
4 系统组网方式
定位芯片通过手机通信信号接入LTE终端,通过eNodeB基站接入Internet。安装TCP服务器的PC,打开1234端口作为TCP服务器,通过校园网网络设备接入 Internet。实验过程中安装了TCP服务器的PC终端内网IP地址为10.10.69.60。然后打开花生壳服务器开启内网穿透功能。10.10.69.60:1234映射的地址为 103.46.128.49:58596。定位芯片或其他客户端想要连接至TCP服务器时可通过连接花生壳服务器上的地址(103.46.128.49:58596)实现TCP连接。网络框图如图9所示。
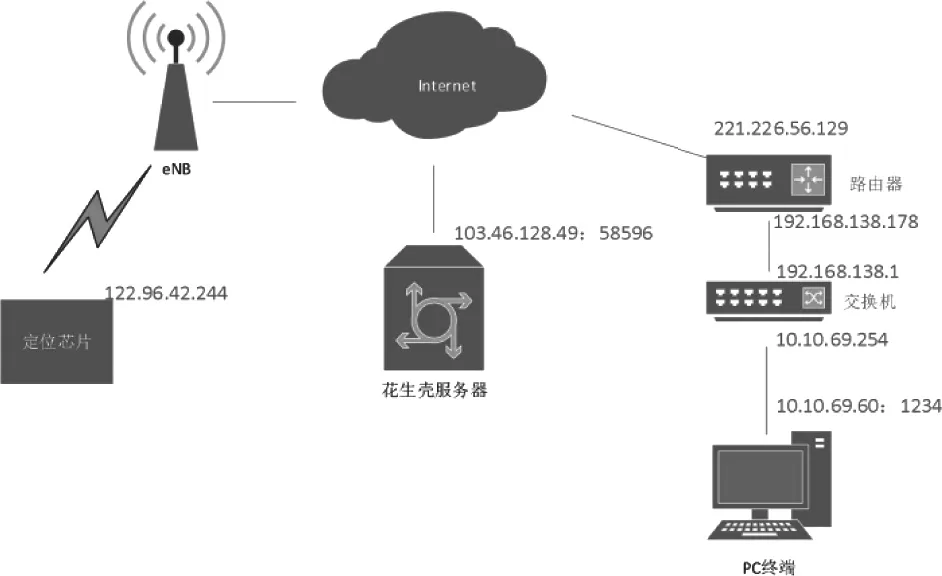
图9 系统组网框图
基站定位系统中网络节点之间的通信采用TCP/IP技术,定位芯片SIM7600CE与服务器不在同一局域网内,为了使SIM7600CE能与服务器成功建立TCP连接,需使服务器的IP及端口应映射在公网上,这里使用的工具是上海贝锐信息科技股份有限公司开发的“花生壳”内网穿透软件。因为使用的是TCP链接,所以在做内网穿透时应用类型选择TCP。域名使用自己申请的域名,外网的端口可使用随机分配的端口,也可使用购买的指定端口。
5 结论
本文对于现今的地铁列车定位做了一个冗余地铁定位系统来应对CBTC可能会发生的一些突发情况,保障人民出行安全。
采用MATLAB软件来对定位系统在实际地铁环境上进行模拟仿真。由于模拟数据定位的精确度要求,和已经成熟的算法信息,还有对于环境复杂程度影响的要求,最终确定了使用Chan算法,作为地铁列车定位技术的定位算法。
硬件方面,使用STM32主控来制作基于基站地铁列车定位系统。定位选用SIM7600ce芯片来接收信号定位。通过组装,加入屏幕12864、电池模块和降压模块,最终实物成型。
