基于iForest与KDE的雷达目标最优距离门估计
2022-06-10汪新坤张文艳
汪新坤,曹 乐,阚 秀,张文艳
(上海工程技术大学 电子电气工程学院,上海 201620)
0 引言
人体的生命体征主要有呼吸、心跳、血压等信息参数,而呼吸和心跳是人体心肺功能正常与否的重要判断依据。人体呼吸和心跳信号的传统检测主要依靠接触式设备,例如心电图和上臂充气式脉搏测量。这些方法需要通过接触式的传感器与被试者接触,对于皮肤烧伤的特殊病患或在地震废墟特殊场合中,这些接触式的检测方法受到了限制。为了适应新的需求,基于毫米波雷达的非接触式生命体征检测在灾难救援和医疗监护等领域有着广阔的应用前景。生命体征检测通常使用调频连续波和超宽带雷达,但该类型毫米波雷达功耗高、价格昂贵。为克服这些限制,本文采用脉冲相干毫米波雷达(pulse coherent radar)实现高精度、低成本生命体征检测。
毫米波雷达在生命体征信号检测过程中,需确定人体胸廓距离门信息,通过距离门提取包含心肺信号和杂波干扰的相位信号。在一般的雷达目标信号检测中,通过均值滤波或动目标显示(moving target indication, MTI)滤波器消除静态杂波,并计算每个距离门所有脉冲的能量谱,采用能量最大原则确定目标距离门。文献[7]采用主成分分析法(principal component analysis, PCA)提取主元特征向量序列曲线上峰值所对应的时延估计目标距离信息,实验结果表明,该方法仅适用于静息状态下人体胸廓目标距离门估计。此外,由于胸廓微动和人体运动为低频运动,MTI滤波会滤除静止及慢速运动目标的杂波,导致在检测时胸廓目标距离门信息变得模糊。在实际检测过程中,人体胸腔起伏和静态杂波会造成目标在多个距离门之间切变,而且肢体运动和外界运动物体会导致目标距离门发生突变,这些干扰因素对生命信号提取造成一定的影响。本文针对这些问题,拟采用滑窗方法,在每个时间窗口内通过孤立森林(isolation forest, iForest)算法,剔除异常的目标距离门,并通过核密度估计(kernel density estimation,KDE)方法,来估计该时间窗口内目标的最优距离门。
1 脉冲相干雷达目标检测原理
1.1 脉冲相干雷达回波数据结构
脉冲相干雷达(pulsed coherent radar, PCR)的数据结构取决于测量距离,它通过划分预设距离间隔即雷达检测的距离范围 [,],将其划分为Δ的增量(距离分辨率),每一个增量代表一个距离门(距离单元),则划分的距离门个数为

如图1所示雷达数据矩阵结构,轴表示检测的距离门数,轴表示在一定的时间内增加的脉冲数量,其对应的是采样频率f;从而产生了的数据矩阵如下式(2)所示,并且每个元素的数据样本都是由实部和虚部构成的复数Z如下式(3)所示,其中表示复数的实部,表示复数的虚部,由此可得到信号的幅值和相位信息。

在图1中还显示了一个静态下的目标1和动态下的目标 2,若动态目标运动速度过大将会造成目标跨距离门或与静态目标距离门重叠现象,这些因素都会对动态目标距离门提取造成一定的影响。

图1 雷达数据矩阵结构
1.2 目标距离门检测
雷达天线接收到物体反射波的电磁波能量最大,反映在雷达回波的数据中即信号幅值最大。在每个脉冲中寻找信号幅值最大的数据点,其计算方法为

式中,为信号幅值最大点的索引,也表示所在距离门。
在雷达数据矩阵A中,对每行进行最大幅值检测并提取每个最大幅值点的索引,即可得到目标距离门矩阵为

根据式(1)可计算目标距离雷达的实际距离为

由此得到目标实际距离维度矩阵为

2 目标异常距离门剔除与最优距离门估计
利用毫米波雷达进行人体生命体征信号检测时,人体胸廓目标的定位跟踪是生命信号检测的前提。图2为一段时间内静态下人体胸廓雷达信号的脉冲-距离像,横轴表示脉冲数(时间),纵轴表示距离门(距离),图2中白色表示信号能量最大。直观显示胸廓目标处在 500~600个距离门之间,同时在第800个距离门处存在杂波信号。

图2 脉冲-距离像
对雷达回波数据通过目标距离门检测,提取到人体胸廓目标位置时域信号和目标位置散点图如图3所示。

图3 胸廓目标原始信号
由图3可知,肢体运动会造成图3(a)目标位置信号突变和出现图3(b)中离群的目标位置点,并且外界环境杂波会导致目标在一定范围内波动。本文通过选择合适的时间窗口,在每个时间窗口内,胸廓目标的距离门被认为是固定的,以抑制目标距离门的实时切换,同时在每个窗口内,通过异常点剔除的方法消除突变的目标距离门;最后基于概率密度估计,在每个时间窗口内选择目标最优距离门,实现人体胸廓目标最优距离门定位检测,其基本流程如图4所示。

图4 人体胸廓目标距离门检测流程
2.1 基于孤立森林的目标异常距离门剔除
针对异常的目标位置点,本文采用iForest进行异常距离门剔除,该算法具有精度高、计算效率高的特点,适用于处理大数据问题。iForest算法进行异常距离门检测主要分为训练阶段和测试阶段两个阶段。在训练阶段,通过递归地划分给定的训练集来构建棵孤立树;在测试阶段,对于每个目标距离门,令其遍历每一颗孤立树,其中所经历的边长为路径长度(),由于iTrees具有与二元搜寻树(binary search tree, BST)等效结构,参照BST的分析方法查询失败的路径长度,实例的路径长度公式为

式中:() = l n() + 0.5772156649;()为给定的路径长度平均值,用来归一化(),其异常值分数的计算公式为

式中:E(())为()在隔离树集合上的平均值;异常分数对E(() )是单调的,判断数据点正常与否的评估标准为

通过对异常点检测并将其剔除,得到剔除后的目标距离门矩阵。在测试过程中,一般= 256,并且路径通常在孤立树数量=100之前收敛,在此默认数值下检测性能最佳。通过iForest异常距离门剔除后,得到胸廓目标位置时域信号和目标位置散点图如图5所示。对比图4可知异常的目标信号被剔除,目标位置点更趋于集中,表明该方法能够有效地抑制突变信号的干扰。

图5 异常距离门剔除后胸廓目标信号
2.2 基于核密度估计最优距离门选取
由于环境干扰会还,导致经过异常点剔除的目标在一定范围内波动,并且环境杂波干扰具有随机性,实际目标位置波动较小,需要从距离门矩阵中选取合适的距离门来提高雷达回波信号的信噪比。本文采用核密度估计的方法描述目标距离门的概率分布,通过概率密度曲线,求取概率值最大所对应的距离门,即为胸廓目标在此时间窗口内的最优距离门。
核密度估计是一种估计概率密度函数的非参数方法,其基于历史样本数据直接构建概率模型,不需要根据数据服从何种分布形势进行先验判断,具有一定的客观性。设有个样本点,概率密度函数为(),则核密度估计公式为

式中:(·)为核函数,采用高斯核函数;为带宽,并且通过多次实验比较,设置=3得到的概率密度分布曲线较平滑,则概率密度函数为

基于核密度估计得到的胸廓目标距离门的概率密度曲线如图6所示,并检测概率分布曲线的概率值最高的点对应所在距离门q,因为核密度估计是估计该组数据点的分布情况,所以密度曲线中得到概率值最高的q可能非整数,通过数据取整得到最优距离门=[q]。

图6 胸廓目标距离门概率密度曲线
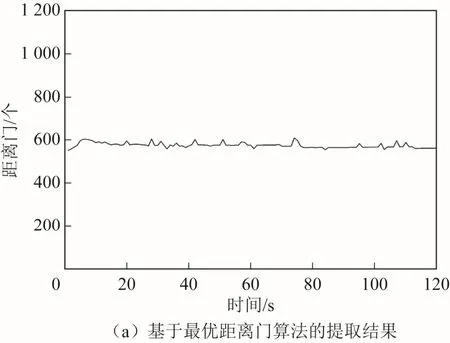
根据最优距离门估计算法,提取到图2中静态下人体胸廓原始雷达回波数据中的目标最优距离门如图7(a)所示,并且在矩阵实验室(matrix laboratory, MATLAB)平台上数据处理的时间为1.87 s;此外采用均值滤波方法,计算每个时间窗内慢时采样值的平方和,基于能量最大原则提取该时间窗内的目标距离门如图7(b)所示,在同一设备下,该方法的数据处理时间为 2.09 s。其中时间窗口的长度设置为1 s,将采样时间分成120个时间窗。通过分析比较两种方法的结果,可以看出基于 iForest和 KDE算法提取的胸廓目标距离门更加稳定,效率更高。

图7 人体胸廓目标距离门的提取
3 测试系统与实验设计
3.1 采集系统与实验装置搭建
本文自主设计的雷达信号采集系统如图8所示,系统包括模拟前端、主控模块及信号调理电路组成。其中模拟前端电路由脉冲相干式A111毫米波雷达芯片及外围电路组成,该芯片采用片内封装天线,在2 m的检测范围内精度可达毫米级,可以实现更高的效率和更低的功耗;主控模块采用嵌入式硬件树莓派,雷达采集到目标物的回波信号通过信号调理模块以低压差分信号串行外设接口(serial peripheral interface, SPI)通信方式向主控模块传输数据,并由主控模块将回波信号在同一局域网下向上位机发送,其中雷达的检测范围为[0.2 m, 0.8 m],Δ=0.48 mm,系统的采样率为 50 Hz。
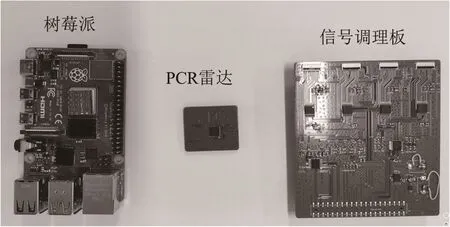
图8 雷达信号采集系统
人体心跳和呼吸会导致胸腔的移动,成人体征信号幅度和频率如表1所示。

表1 体征信号参数表
不同的人体征信号也会有不同,为达到一种标准的测试环境,本文设计了一种人体呼吸模拟装置如图9所示。
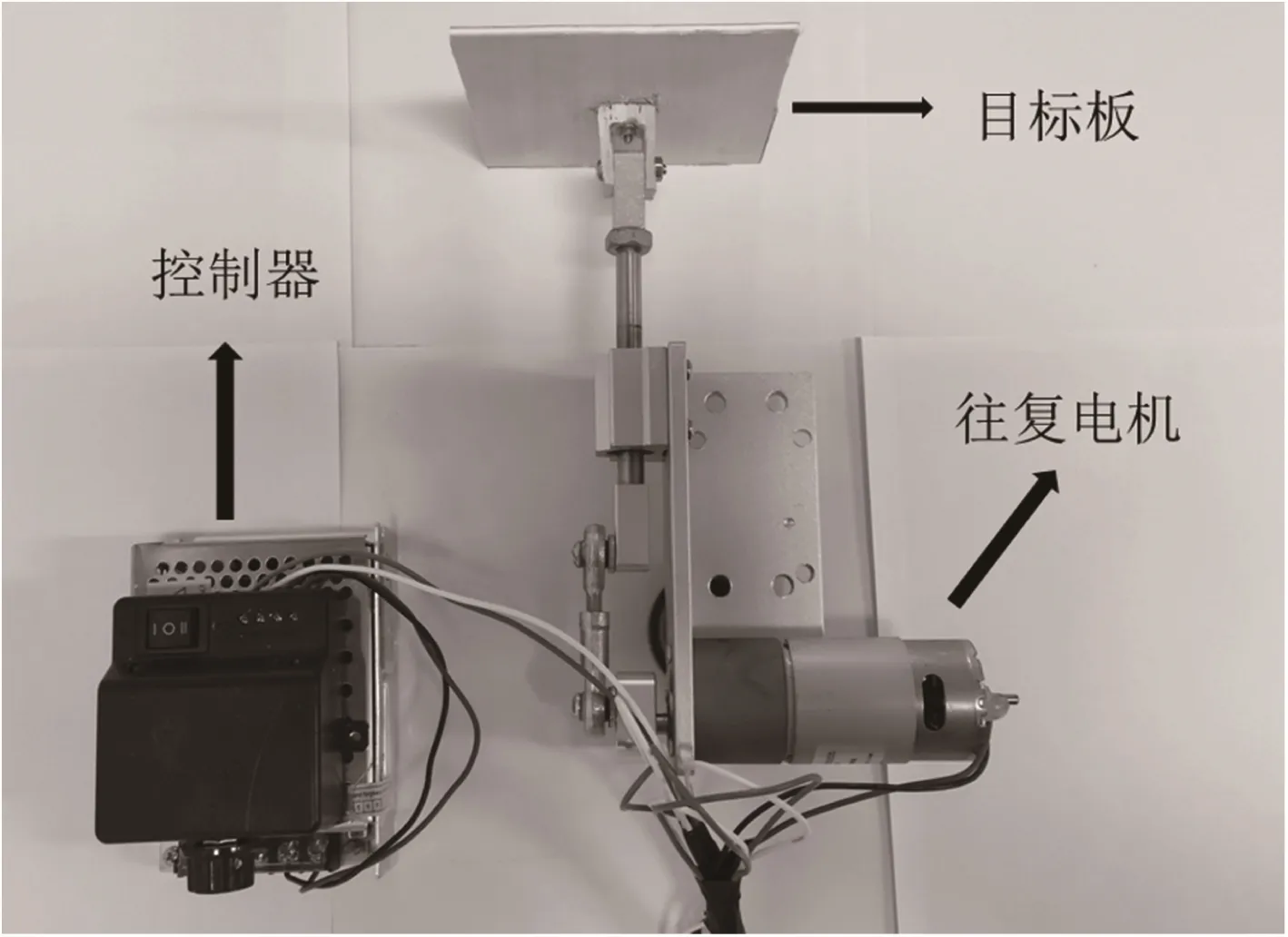
图9 模拟呼吸装置
该实验室装置由往复电机、控制器和目标板组成,其运动幅度为15 mm,运动频率为0.3 Hz,与一个正常人呼吸运动状态相近。同时为了仿真人体在动状态下的胸廓变化,在该装置上增加一个液压杆,并以低速带动模拟装置在雷达径向上做相对运动,若只做相对横向运动,其目标多普勒速度为0,目标在雷达回波信号距离维中不会引起距离门的变化。通过该实验室装置研究人体在微动状态下,胸廓目标距离门的变化。为了便于分析装置的运动信号,此装置只模拟呼吸这种生命体征信号。
3.2 实验设计
实验主要包括模拟装置呼吸实验和静态人体呼吸实验。首先进行模拟装置在静息状态下和运动状态下的呼吸测试。在静态下,将模拟装置设置在距雷达0.3,0.4,0.7 m的位置,分别进行2 min的采样;在动态下,模拟装置的初始位置在0.6 m处,液压杆以12 mm/s的速度带动模拟呼吸装置与雷达传感器做径向的相对运动;微动实验方案流程图如图10所示。

图10 微动实验方案流程
在静态人体呼吸实验下,受试者胸廓距雷达0.5 m并正对传感器进行2 min采样。模拟装置与人体的测试环境如图11所示。

图11 实验测试环境
4 实验结果分析
基于最优距离门估计算法提取模拟呼吸装置在静态和动态下的目标板距离门,为定性分析最优距离门估计算法的精度,提取模拟装置检测到所在最优距离门的相位信号,并根据相位信号提取装置的模拟呼吸信号频率与装置运动频率,比较分析其实验结果。
4.1 模拟呼吸装置最优距离门提取
在每个脉冲的距离维度,提取模拟装置在静态和动态下的原始雷达回波目标距离门,并通过距离解算得到模拟装置在静态和动态下的目标距离信号如图12所示。

图12 模拟装置的原始目标距离信号
通过最优距离门估计算法,提取模拟装置在静态和动态下的每个时间窗内目标最优距离门,得到模拟装置目标距离信号如图13所示,对比目标原始距离回波信号,可以看到通过最优距离门估计算法有效地抑制了杂波信号的干扰和距离门突变问题。

图13 距离门估计算法后模拟装置目标距离信号
4.2 模拟装置呼吸信号提取
提取每个时间窗口内目标最优距离门的相位信号并进行相位解缠,得到装置在静态下和动态下的模拟呼吸时域信号如图14所示,并通过快速傅里叶变换(fast Fourier transform,FFT)得到模拟装置呼吸频域信号如图15所示,根据频域信号提取装置的模拟呼吸频率与装置设定的运动参考信号频率如表2所示。

表2 模拟装置的呼吸频率测量结果
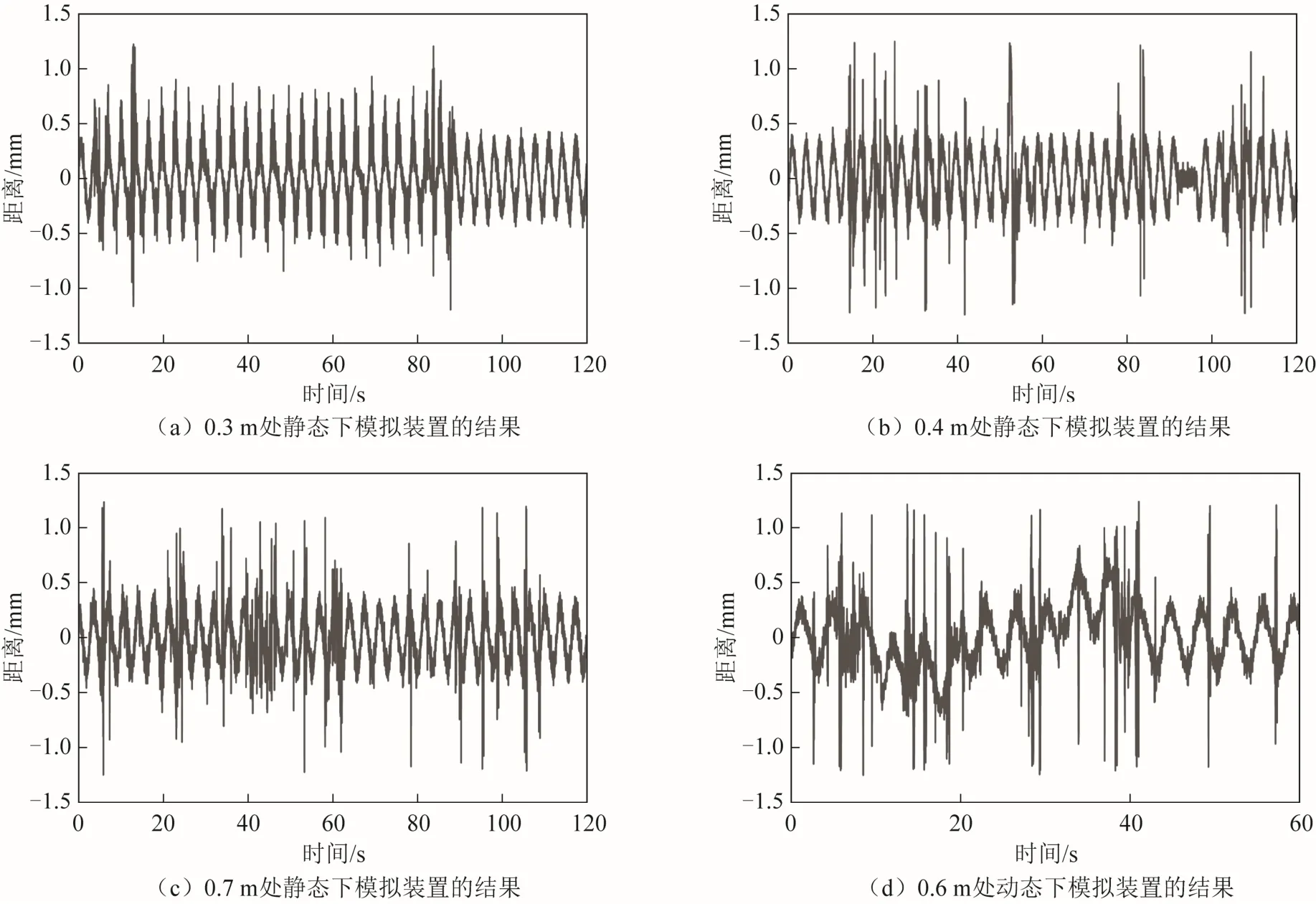
图14 模拟装置呼吸时域信号

图15 模拟装置呼吸频域信号
由图12、图13可知,提取到的模拟呼吸信号基本符合电机运动规律且信噪比很高。但是环境中的动态噪声,仍然对提取目标最优距离门的相位信号产生一定的干扰,尤其当目标信号相位接近与-π∼π时产生的尖峰信号更加明显,在后续信号处理中,可以采用滤波、差值取代来消除这种类似脉冲的噪声。同时由表2可知,与装置运动的参考频率相比,静态下模拟装置在0.3、0.4、0.7 m检测的误差率分别为2.80%、2.77%、5.17%,动态下的模拟装置检测的误差率为8.30%,随着检测范围变大和在运动状态时,误差率明显增大,但是结果仍在误差范围内。实验结果表明,通过目标所在距离门的相位信号,能够准确提取模拟装置的呼吸信号。在此基础上进行实际人体呼吸测试,根据最优距离门估计算法估计人体胸廓目标距离门,由于距离门提取的相位信号为呼吸和心跳的复合信号,所以通过带通滤波器提取到人体呼吸时域信号和频域信号如图16所示,可以发现基于距离门的相位信号提取呼吸信号的杂波较少,信噪比很高,从而验证了最优距离门估计算法的有效性。

图16 人体呼吸信号
5 结束语
本文以毫米波雷达生命体征信号为研究背景,针对人体胸廓目标距离门定位问题,提出了一种基于 iForest与 KDE的雷达目标信号最优距离门估计方法。通过模拟呼吸装置进行实验验证并进行人体呼吸测试。首先提取目标的采样距离门,在每个时间窗内通过iForest和KDE算法进行异常目标距离门剔除和最优距离门估计,然后基于目标距离门的相位信息,提取模拟装置呼吸频率并与参考频率进行对比,在静态下,误差率最高为5.17%,在动态下,误差率为8.30%;最后基于上述实验方案提取到的人体呼吸信号,杂波少、信噪比高。因此,该方法为毫米波雷达生命信号目标最优距离门检测提供了一种有效研究方法。
