基于改进人工势场法的船舶自主避碰方法
2022-06-10朱武斌
朱武斌
(连云港引航站, 江苏 连云港 222042)
0 引 言
近年来,随着现代信息技术和人工智能(Artificial Intelligence,AI)技术的不断发展,融合这些技术的船舶体现出了安全、可靠、节能环保和经济高效等特点,是未来船舶发展的重要方向和研究热点。船舶通过将固态雷达、激光雷达、红外视觉、AI声音智能识别、遥感和三维重构数字场景等新技术与多媒体技术相融合,解决船舶航行环境探测、感知和认知等方面的问题,提高碰撞危险度的计算精度,为船舶避碰提供高精度的决策基础,降低航行风险。船舶在海上航行期间不仅会受到静态障碍物的影响,而且会受到海况、船舶等动态目标的影响。因此,相比其他系统,自主性是船舶的关键技术因素。特别是在军事领域和复杂的海况下,对船舶的自主避碰技术提出了更高的要求。在避碰决策研究中,不同的避碰模型考虑的因素不同,导致避碰精度存在差异。在研究船舶自主避碰时,可考虑根据船舶碰撞危险度进行避碰。本文将传统的人工势场法与碰撞危险度相结合,指导船舶自主避碰。
1 传统人工势场法
人工势场法是由 KHATIB提出的一种虚拟力法,该方法将船舶、障碍物和目标点放在一个虚拟的二维平面受力场中进行分析,其中:障碍物对船舶产生斥力场,防止船舶靠近,与距离成反比,距离越近,斥力越大;目标点对船舶产生引力,与距离成正比,距离越大,引力越大。因此,船舶主要沿引力与斥力的合力方向运动。
将船舶作为一个运动质点,建立二维平面坐标系,为方便计算和不引起误解,沿用传统坐标系,设船舶平面坐标为(,),目标点坐标为(,),船舶受到的引力势场函数为,其计算公式为

(1)


(2)
设引力为,可用引力势场函数的下降方向负梯度表示,即
()=-∇()=(-)
(3)
由式(3)可知,引力的大小与距离有关,船舶越接近目标,引力越小,直至到达目的地,引力为零。
设斥力场函数为,船舶受到障碍物的斥力的表达式为
(4)
式(4)中:为斥力场系数,≥0;为船舶与障碍物之间的距离;为船舶受障碍物的斥力影响的范围,定义船舶在一定距离范围内才受障碍物斥力的影响,当船舶处在斥力影响范围内时,其与障碍物之间的距离与斥力成反比,距离越小,斥力越大,碰撞的可能性越低。船舶与障碍物之间的距离的计算公式为

(5)
设斥力为,可用斥力势场函数的下降方向负梯度表示,即
=-∇()
(6)

(7)
式(7)中:对求导包括对船舶坐标中的轴和轴分别求导。由上述分析可知,船舶在运动环境中所受总势场和总合力为
(8)
传统的人工势场法涉及到陷入极值和目标不可达问题,已有很多学者对这2类问题进行研究。张玉婷对斥力场进行改进,引入距离函数,解决引斥力过大致使无人艇路径发生偏移的问题。刘砚菊对斥力进行改进,建立虚拟目标解决局部极小值和凹型槽陷阱问题,仿真结果表明,两者结合能很好地规避局部极小值问题。仇恒坦等利用改进的斥力函数,向其中加入距离因子解决目标不可达问题,利用旋转斥力角度解决极小值问题。本文引入碰撞危险度相关变量对人工势场法进行改进。
2 基于碰撞危险度的改进人工势场法
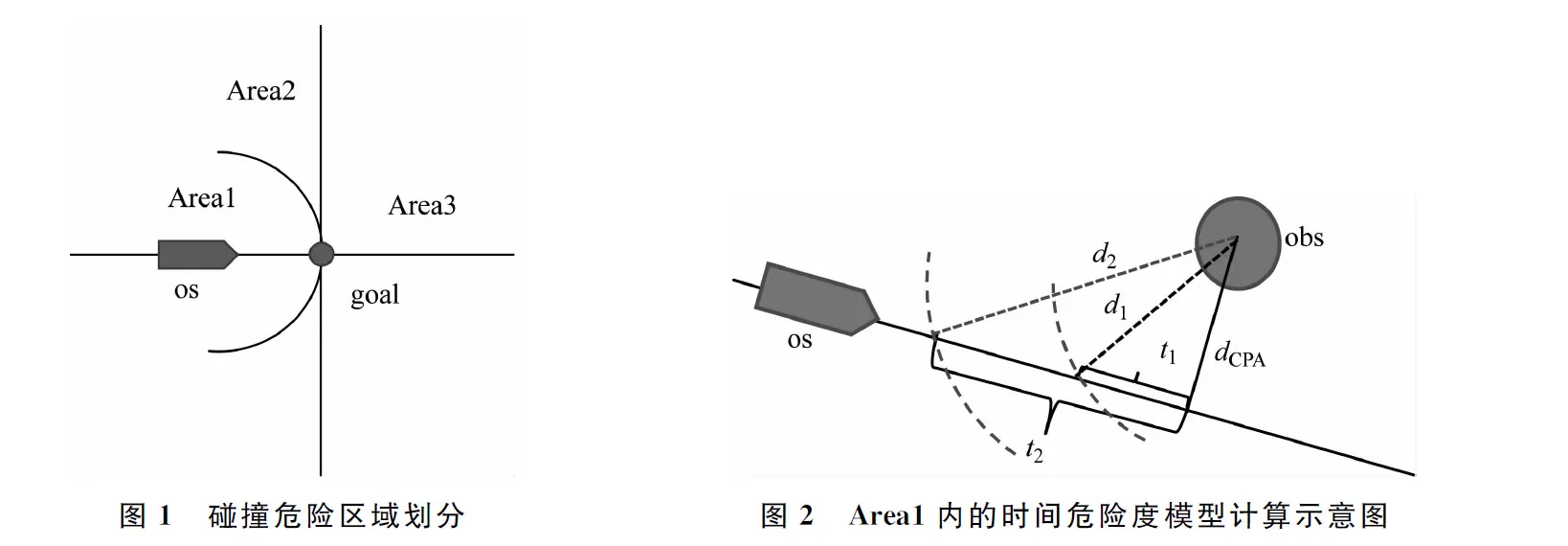
将碰撞危险度引入人工势场法中进行避碰分析。首先,对碰撞区域进行分类处理,以船舶与目标之间的距离为半径,对碰撞危险区域进行划分,分为Area1、Area2和Area3(见图1),不同区域碰撞的可能性不同。随后,根据船舶的最近会遇距离(Distance to the Closest Point of Approach,)和最近会遇时间(Time to the Closest Point of Approach,)计算模型,建立基于改进的人工势场法的碰撞模型,对不同区域的时间碰撞危险度模型进行设置。
1) Area1的时间危险度模型采用常规避碰模型计算,表达式为
(9)

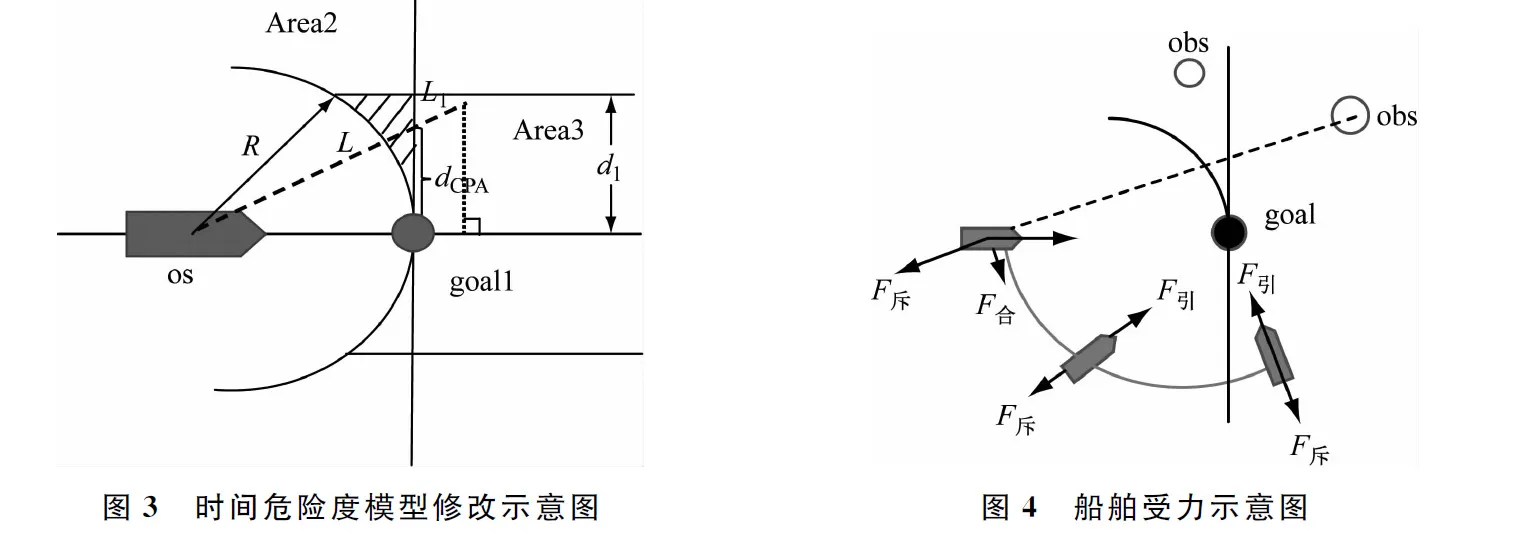
2) Area2和Area3存在碰撞的可能性小,因此对时间模型进行条件限制(见图3),模型设为CPA,其计算公式为

(10)
式(10)中:(,)为船舶与障碍物之间的距离。对Area2和Area3的障碍物进行危险度分析:当同时满足<、(,)≤和0≤≤(即图3中的斜线区域),且时间在最晚避让时间内时,碰撞危险最高设为1;当Area1和Area2中斜线以外的障碍物满足~、>、(,)>、≥且<0中的1个时,碰撞危险度为0。为船舶与障碍物之间的距离,利用两者的坐标进行计算。当障碍物处在Area1内时,按常规时间危险度模型进行计算。通过上述分析可建立总的避碰危险度模型,表达式为
(11)
针对人工势场法常见的目标不可达和易陷入局部极小值2类问题,利用碰撞危险度进行判定,指导船舶避让。
1) 目标不可达问题主要是目标附近存在影响船舶靠近的障碍物,导致目标点引力和斥力场不是全局最小点,这种现象主要在本船、障碍物和目标三点共线且状态稳定的情况下出现,船舶在高动态的环境下航行时不太可能产生目标不可达问题,或产生该问题的时间较短,相对位置变化后又消失了。因此,对于目标不可达问题,可排除Area1内的障碍物和高速动态的障碍物,Area2和Area3内的障碍物易使船舶受斥力的作用和与目标形成三点共线,见图4。当障碍物处在Area1内时,可采取上述避碰总模型;当障碍物处在Area3内时,时间模型CPA=0,则根据总模型危险度为0,不发生碰撞;当障碍物处在Area2内且在斜线区域外时,空间上>,改进的时间模型CPA=0,则碰撞总模型危险度为0。综上所述,当碰撞危险度数据符合上述条件时,可通过取消障碍物斥力消除目标不可达问题。
2)极小值问题一般出现在船舶航行阶段,与目标还有一定距离时目标陷入局部最小值,存在的条件也是存在三点共线问题。当三点共线时,船舶的=0,由空间避碰模型可知=1,则总模型危险度为1,可通过采取转向、改变斥力场和引力场等措施避免碰撞。
3 仿真结果与分析
下面采用上述碰撞危险度总模型对人工势场法进行改进。船舶仿真环境基于MATLAB平台搭建,仿真中船舶的初始状态设置为((0),(0),(0))=(0,0,8)。系统引力增益系数=15;斥力增益系数=5;障碍物影响距离设置为=15,=3;初始航行角度为45°。在航行环境中设置4个动态障碍物和5个静态障碍物,仿真结果如下:
1) 对于目标不可达问题,分别采用传统人工势场法和基于碰撞危险度的改进人工势场法进行仿真,得到的航行路径仿真结果见图5和图6,船舶与目标和障碍物1的距离关系见图7和图8,船舶危险度值仿真结果见图9和图10。
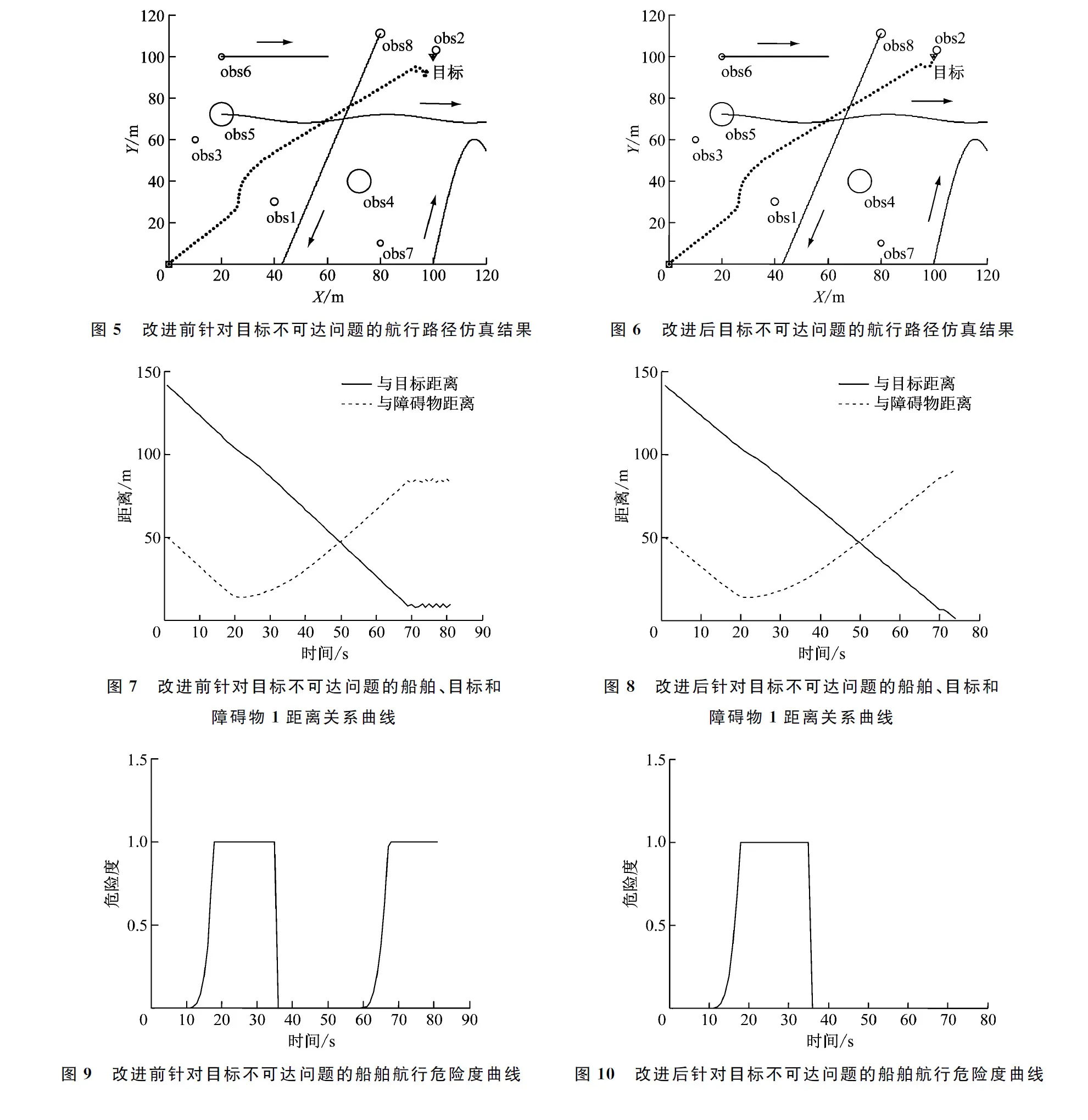
由图5和图6可知,与传统人工势场法相比,基于碰撞危险度的改进人工势场法在经过obs1之后到达目标附近(obs2处)时未出现目标不可达问题。由图9和图10可知,经过obs1之后,利用危险度总模型可得之后的碰撞危险为0,目标附近(obs2处)的斥力影响可通过危险度值的干扰取消,从而有效解决目标不可达问题。
2) 针对局部极小值问题,分别采用传统人工势场法和基于碰撞危险度的改进人工势场法进行仿真,传统人工势场法易在航行过程中出现局部极小状态,改进前和改进后的航行路径仿真结果见图11和图12,船舶与离障碍物1和目标的距离关系仿真结果见图13和图14,船舶航行危险度曲线见图15和图16。

由图11和图12可知,在传统人工势场法中,船舶航行期间目标、障碍物1和运动物三点一线,陷入了局部极小值,可利用碰撞危险度总模型改进传统人工势场法,识别局部极小状态。由图15可知,改进前当到达obs1附近时,危险值始终为1,出现了局部极小值问题,可先利用危险度总模型识别该问题,再通过增加虚拟斥力改变船舶方向,改变极小值状态。由图16可知,图中显示状态发生改变之后绕行obs1时危险度下降,当慢慢接近obs2时再次上升,识别危险之后再次通过增加虚拟斥力进行避让,绕过obs2之后危险度显示为0,达到了解决陷入局部极小值问题的目的。
4 结 语
本文在船舶基本理论的基础上对船舶避碰问题进行了深入研究,通过建立船舶碰撞危险度模型,对人工势场法进行了改良。利用危险度值解决了人工势场法中常见的目标不可达和陷入局部极小值问题,利用MATLAB对航行过程中的静态和动态避碰进行了仿真。仿真结果从距离、时间和危险度等3个方面体现。
1)对于目标不可达问题,在采用传统的人工势场法时,随着时间的推移,船舶距离目标越来越近,距离障碍物越来越远,但遇到目标不可达问题之后在原地徘徊,距离表现为随着时间的推移呈锯齿形恒定,危险度最终越来越接近于1,改进后的方法则表现为最终接近目标,远离障碍物,危险度表现为0,安全到达目标点;
2) 对于航行路径上出现的局部极小值问题,由仿真曲线可知,传统人工势场法陷入极小值陷阱之后出现随时间的推移距离不变的情况,危险度上升至1,改进之后随时间的推移,距离障碍物越来越远,距离目标越来越近,最终达到目标点,且危险度为0。
本文所述改进的方法为船舶避碰提供了思路和数据支撑,在实际应用中避碰环境复杂多变,还需针对不同的环境进行改进,或综合其他避碰方法进行改良。
