基于声学标记追踪法的湖泊鱼类时空分布研究
2022-06-09叶少文王佳成刘传昂刘家寿刘兴国
石 磊 叶少文 朱 浩 纪 翔 王佳成 刘传昂 刘家寿 刘兴国
(1. 中国科学院水生生物研究所淡水生态与生物技术国家重点实验室, 武汉 430072; 2. 大连海洋大学, 大连 116023;3. 中国水产科学研究院渔业机械仪器研究所, 上海 200092; 4. 西南大学水产学院, 重庆 402460;5. 图索科技(上海)有限公司, 上海 200333)
传统的水生动物生物学和行为学研究通常采用捕捞及实验室饲养等方式进行, 而对于水生动物在自然状态下的行为模式研究依然较少并存在很大的局限性, 因此生物遥测技术(Biotelemetry)作为一项能够监测自然状态下鱼类生活史行为的技术,越来越成为探究水生动物行为学与生物学等的重要研究手段之一[1]。生物遥测技术是指通过将声学发射器安置在自然动物上, 以接收机的数据为分析依据, 可在实验室内监测动物的位置、生理指标及周边的栖息生境等[2]。这一技术的逐步完善, 拓宽了水生动物的研究方向与领域。
生物遥测始于20世纪50年代, 最早是用于海洋生物的声学标记系统, 并随着生态学和材料学等方面的进步开始得到发展[3]。国外学者通过水声学标记与追踪系统, 针对鱼类觅食、迁徙和繁殖等生活史行为进行了广泛的研究, 包括追踪监测鱼类生活范围、固定活动位点、河口等重要地理位置及产卵行为与幼鱼洄游的路径等[4—10]。而针对鱼类的家域范围, 可通过100%最小凸多边形法(Minimum convex polygon, MCP)及50%和95%核利用率分布法(Kernel utilization distribution, KUD)确定鱼类活动的核心区域[11—14]。国内的生物遥测起步较晚, 最早是用于追踪和确定珍稀动物的生活史行为, 例如: 危起伟等[15]1995年和1996年期间对15尾繁殖期中华鲟进行标记, 确定各尾鲟的产卵期间的行为轨迹; 其后, 林永兵[16]对18尾中华鲟亲鲟进行标记, 探究其在葛洲坝下至长江入海口江段的偏好栖息地和迁移速率等。同时, 生物遥测也逐步被用于增殖放流和生态修复项目, 例如: 郭禹[17]在对增殖放流下的黑鲷与花尾胡椒鲷进行标记, 确定了其生活习性与洄游规律; 王志超等[18]利用VPS定位系统, 对人工礁区内5种鱼类进行声学标志跟踪, 明确了其家域情况和人工鱼礁的整体利用率。目前我国的生物遥测技术在淡水领域的监测活动相对较少, 尚未建立一套完整的针对浅水草型湖泊内各种经济型鱼类的追踪监测体系, 该研究领域亟需一套较为全面的构建与评估系统。
本研究基于白洋淀鱼类与水环境的多次调查,充分了解实验地区的环境条件, 再利用Vemco定位系统(Vemco position system, VPS), 构建完整的浅水草型湖泊的生物遥测系统, 评估其监测效果并探究接收机接收量与各种非生物因素的相关性, 为后续生态修复提出建议, 同时填补生物遥测技术在该方面的空白, 为相关研究提供参考。
1 材料与方法
1.1 实验地点
本研究于2019年6月至12月(夏季、秋季与冬季)在河北省保定市雄安新区境内白洋淀区鲥鯸淀进行(N: 38°50'39.39″, E: 115°59'30.04″), 如图 1所示, 该淀区为农业农村部“白洋淀水生生物资源调查与水域生态修复示范项目”的五大示范区之一,属于典型的浅水草型湖泊。本次声学标记追踪实验于生态修复示范区2 km2围隔内进行, 实验区平均水深为3 m。
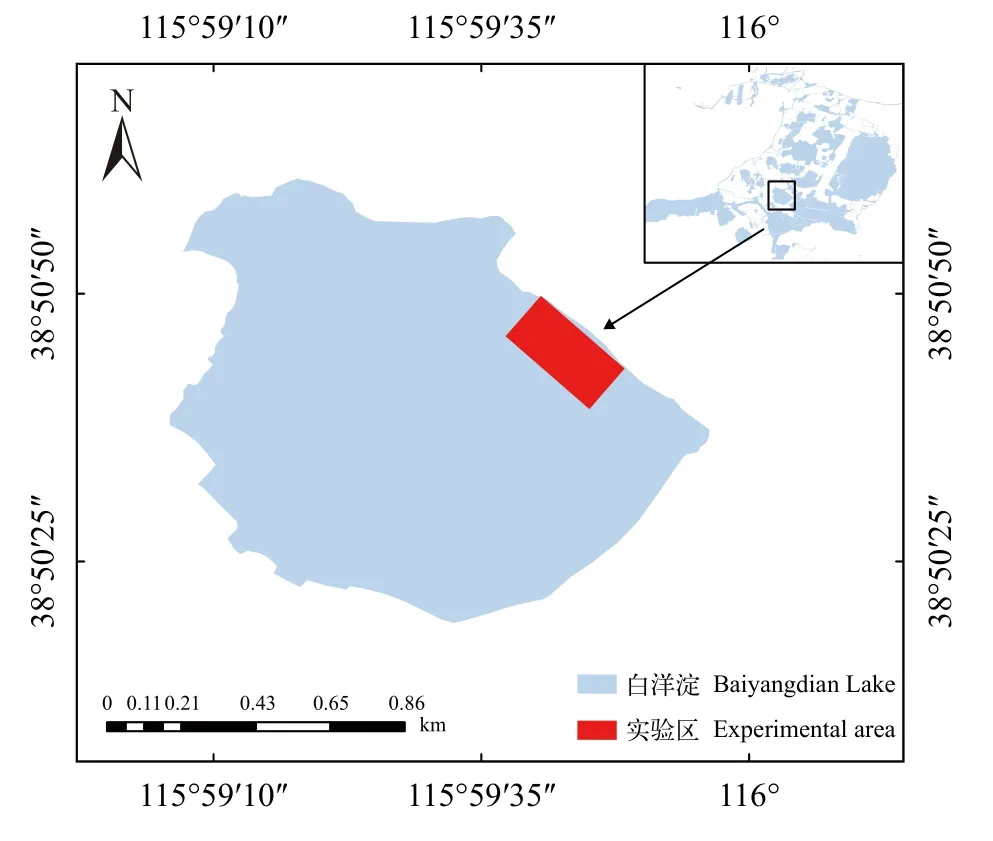
图1 白洋淀研究区域Fig. 1 Study site in Baiyangdian Lake
1.2 实验方法
标记与监测系统本研究使用V8-4L型发射器, 声源级144 dB relμPa @1m, 外壳使用耐压亚克力管, 外观直径长20.5 mm, 宽8 mm, 空气中重量为2 g, 水中重量为0.9 g, 发射器的使用寿命随着发射周期的信号而变化(表 1)。所使用的接收机为VR2Tx型, 其不断接收并存储周围所发射的唯一编码的超声波信号。每个接收机携带有温度传感器并且能够与发射器时间同步, 内置电池可使用14个月左右,内部可存储160万个发射信号, 并通过独立的磁吸式开关打开蓝牙系统将信号上传至计算机(表 2)。
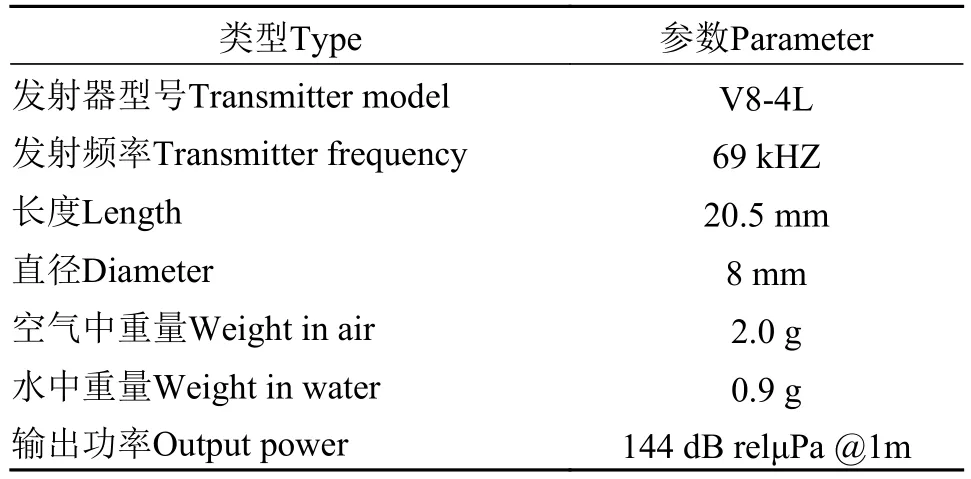
表1 发射器参数Tab. 1 Transmitter parameters
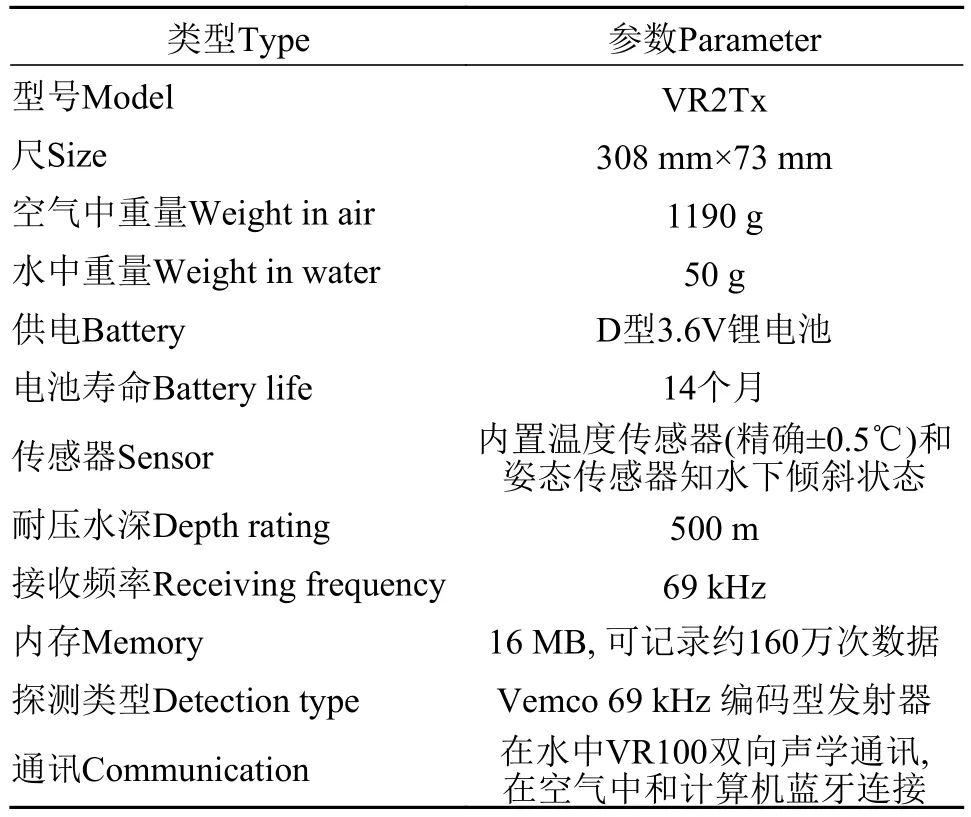
表2 接收机参数Tab. 2 Receiver parameters
现场接收距离测试实验由于声学系统性能发挥与各种因素相关联, 包括实验区水生植被生长状况、礁石分布、水温、风速、降雨及发射器与接收机的距离等。因此在布设接收机阵列前, 需对VR2tx型接收机在鲥鯸淀水域接收性能进行科学评估[18,19]。首先在实验区内进行距离监测(图 2),将测试发射器放置于试验区某处, 沿直线方向上以相同的距离间隔放置实验接收机。测试结果表明,当距离为140 m时接收率为73.7%, 当距离为60 m时, 接收率高达93%。为保证接收效率并充分结合实验区地形, 最终确定相邻3个接收机投放间隔距离约为60 m。在进行阵列设计时, 对于位置数据接收至少需要3个接收机组成三角形确定发射器位置,而接收机接收量越大, 路径分析越准确, 因此确定接收机摆放如图 2右所示。在接收机的固定方式上, 上方采用警示性浮漂用以确定接收机位点, 中心使用宽10 mm尼龙绳用以连接接收机与下方固定物, 接收机使用尼龙扎带固定于尼龙绳中部, 底部采用水泥浇筑的圆柱型石块固定, 其重量需保证接收机位置不变。
实验区通过人工抓取、以点代面的方式获取水草种类、分布与生长状况, 称取水草鲜重, 利用ArcGis Pro的克里金插值法绘制出试验区水草分布状况。实验区的平均水深为3 m, 针对水草、人工鱼礁及礁石等对信号接收的影响, 接收机放置位置必须高于人工鱼礁且高于水草的平均长势, 但同时考虑到所追踪的鱼类预期的活动情况更加偏向于中下层水域, 则最终确定接收机放置于水面以下1 m处, 同时将接收机顶端的换能器朝向底层。在接收机矩阵相对接收效果较好的范围内放置参考发射器(V8-4L型), 用以确定所接收超声波信号的准确性并校正最终数据(图 2)。

图2 接收机摆放距离测试(左图)与摆放位置(右图)Fig. 2 Range test for location of receivers (left) and location of receivers (right)
鱼类标记方法为减少鱼类外部损伤同时减小实验误差, 本实验所标记鱼类均使用地笼与拖网于白洋淀内捕获。所有实验鱼均在水箱内暂养12h并选取具有正常生理活动的个体进行标记, 此外为保证发射器对鱼体的影响较小, 发射器重量需满足“2%规则”, 即发射器重量需要小于鱼体重量的2%[20—26]。标记鱼乌鳢体长为34.22—38.65 cm, 体长平均值为36.51 cm, 体重为311.4—356.1 g, 体重平均值为334.15 g; 标记鱼鲫的体长为22.95 cm, 体重为216 g, 所用实验鱼详细形态特征如表 3所示。为防止发射器在实验期内脱落, 本研究通过手术缝合法将发射器导入实验鱼腹腔内。以MS-222为麻醉剂, 当鱼类表现为身体侧翻, 尾部停止摆动, 轻触下无任何应激反应为最佳麻醉期, 此时快速取出标记鱼, 以碘伏消毒腹部, 使用医用手术工具轻划腹部大约10—12 mm伤口, 放置发射器, 快速缝合, 置水中暂养, 手术期间取少量高溶氧水保持鱼类鳃部及其他部位湿润[23]。暂养24h观察, 待鱼体未有任何异常后, 将追踪鱼放入实验区内。
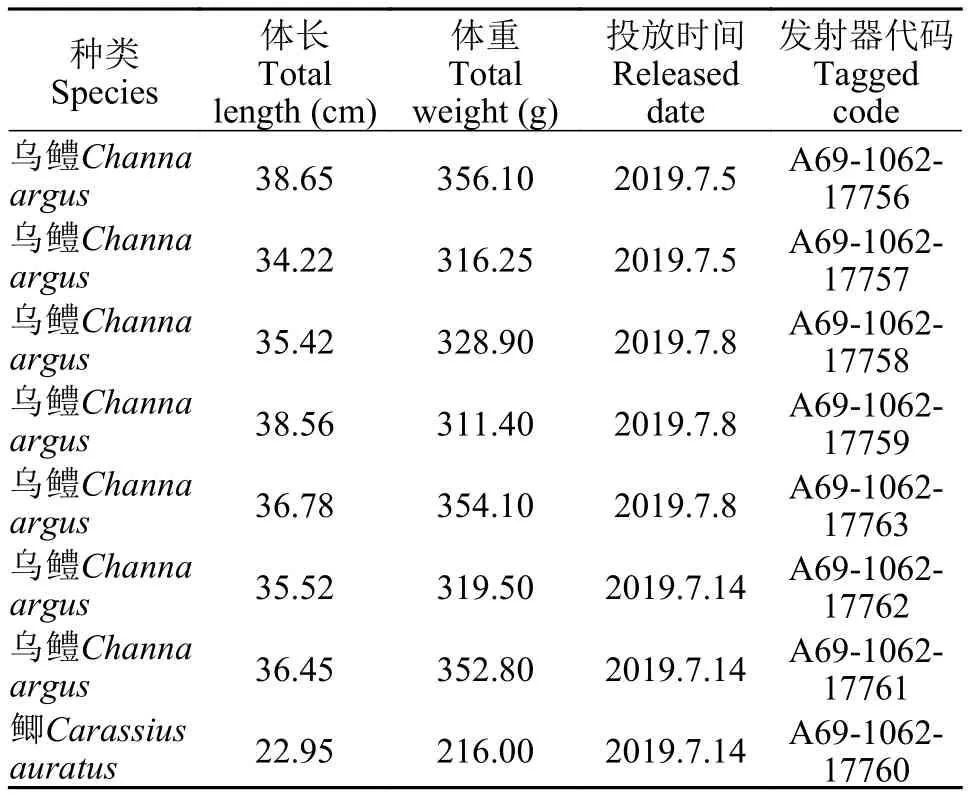
表3 发射器代码与放流鱼类Tab. 3 Record of tagged code and released fish
1.3 数据分析
定期收取追踪数据, 使用Vemco公司的VUE软件进行预处理分析, 获取接收机接收率与接收效果情况, 精密的位置数据等由Vemco公司开发的Fathom Position软件分析。取夜间的接收量与日间的接收量之差, 作拟合曲线并检验显著性(凌晨6:00至傍晚时分18:00定义为白天, 下午18:00至次日凌晨6:00定义为夜间)。将天气情况按照等级分为1—6级, 分别代表晴、多云、阴、小雨、中雨及暴雨, 使用一般线性模型(ANOVA方差分析)探究接收量与天气情况的相关性, 若天气对接受量存在影响, 再采用Tukey-Kramer法对不同的天气状况进行多重比较, 探究不同天气之间是否有差异。统计实验期间逐日的温度变化, 采用Kendall和Spearman秩检验计算温度变化与接收量的相关性。在使用以上统计分析之前(除秩相关性分析), 原数据已满足自变量与因变量的线性关系以及观测间相互独立, 未服从正态分布及方差齐性的数据, 通过一定的转换使得数据满足条件(天气数据中中雨与暴雨仅有1例, 因此并未考虑)。本研究显著性水平设定为0.05。
统计分析与制图使用开源统计软件R 3.6.2(R Core Development Team, 2019)与Excel 2016实现。
2 结果
2.1 水生植被覆盖
本研究在布置阵列之前预先对实验区水生植被覆盖情况进行调查, 共鉴定沉水植物3门3属3科4种, 包括了穗状狐尾藻(Myriophyllum spicatum)、篦齿眼子菜(Stuckenia pectinata)、菹草(Potamogeton crispus)及金鱼藻(Ceratophyllum demersum),水生植被覆盖情况如图 3所示。实验区内中心部分水生植被生长密度较低, 而围隔边缘覆盖密度较高。
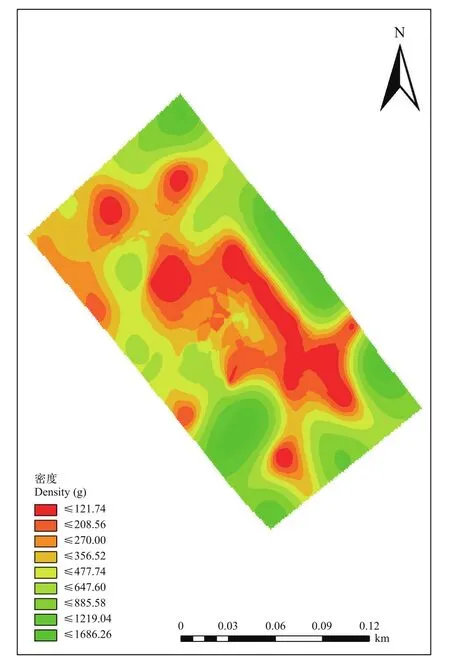
图3 研究区域水生植被覆盖状况Fig. 3 Coverage of aquatic vegetation in study area
2.2 鱼类标记
本研究暂养过程中发现, 鲫的死亡率和感染率均达到75%, 初步判断是由于腹部肌肉较多, 伤口易受感染; 相对的, 乌鳢的腹部肌肉较少, 有轻微感染或无感染现象, 死亡率为41.6%, 同时感染率仅为13.33%(表 4)。乌鳢相对鲫体型狭长, 腹部空间相对较小, 虽然已经满足“2%规则”, 但通过死亡解剖了解到其存在发射器压迫肠道的现象。在多次试验后发现, 发射器必须斜放入腹腔, 并进行必要的腹部舒缓平压, 使得发射器归于较为合适的位置;鲫腹部相对于较宽, 从死亡解剖上看, 并不存在发射标志压迫肠道现象。在进行手术缝合时, 因标记鱼在水体环境下的生活史行为易造成手术结松动,故不应单纯使用普通手术的方结, 结果显示三重结或者四重结较为合适。
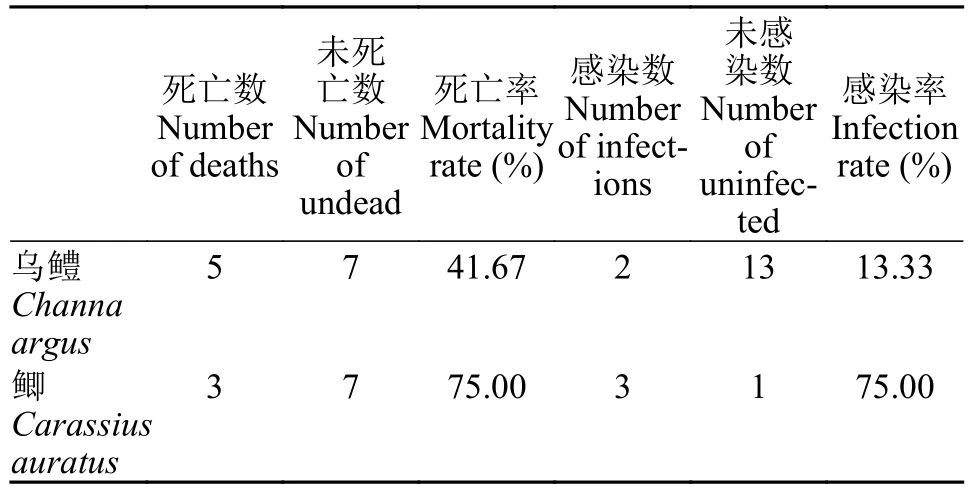
表4 实验鱼死亡记录Tab. 4 The death record of experimental fish
2.3 监测结果
如表 5所示, 其中A69-1062-17756和A69-1062-17757虽监测天数达到14d与23d, 但受接收效果的影响, 定位接收量却小于1000, 因此不予考虑。编号A69-1062-17760实验鱼虽定位接收量较大且监测时间较为完整, 但对其路径分析可知其已在放流不久后死亡, 因此也不予考虑。在其他5尾标记鱼中, 编号A69-1062-17758和A69-1062-17762虽监测时间仅为10d和9d, 但接收量却较大, 路径行为可以看出明显的偏好。
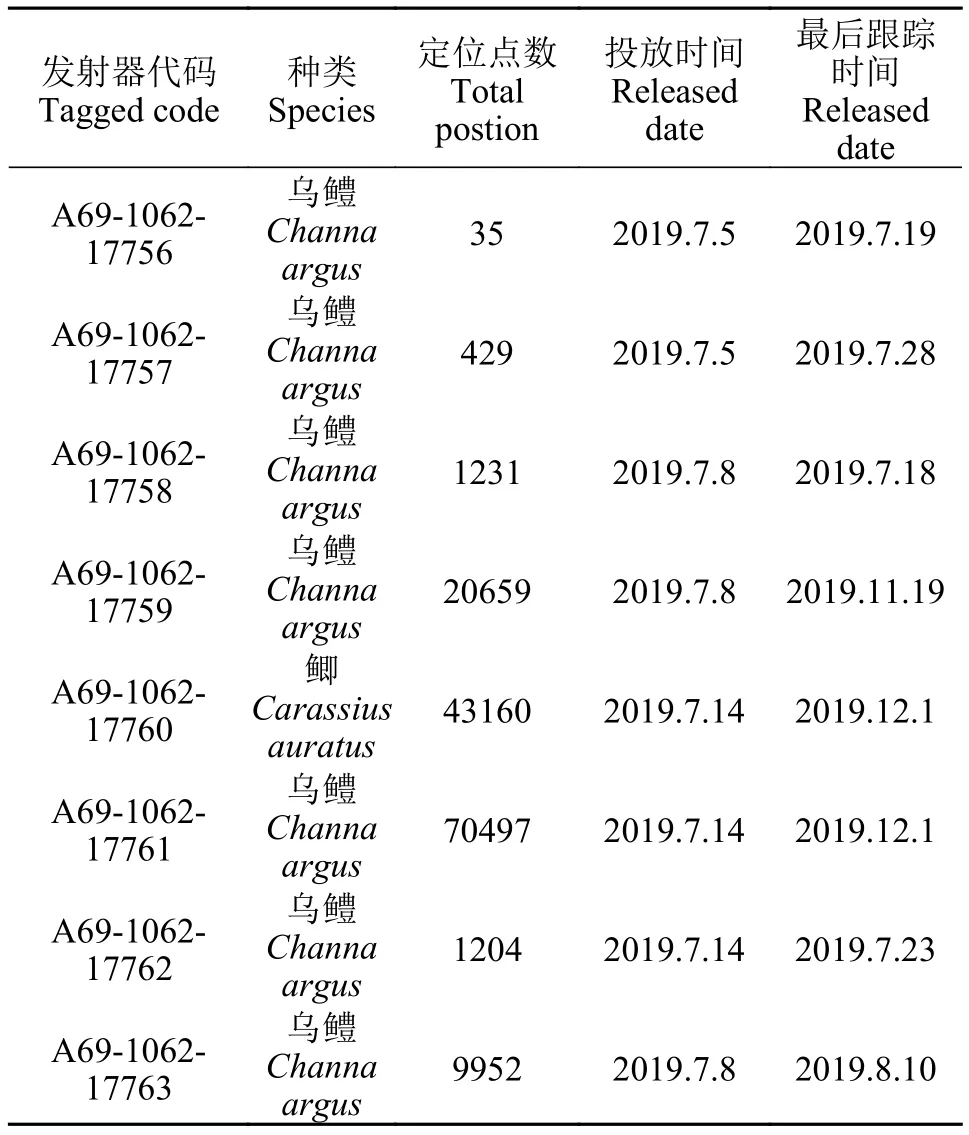
表5 放流鱼类监测状况Tab. 5 Record of the released fish
本研究对所获取的放流鱼类监测结果进行初步分析, 其水平位置如图 4所示, 路径均为计算后标记鱼的实际地理位置。除去编号为A69-1062-17761的标记鱼类未表现出明显的活动范围外, 其他4尾均存在一定的沿围网边缘活动的行为, 对比图 3水草分布情况可知围网周边水草密度较大, 这可能与乌鳢喜好潜伏水草区的伏击捕食行为相关。
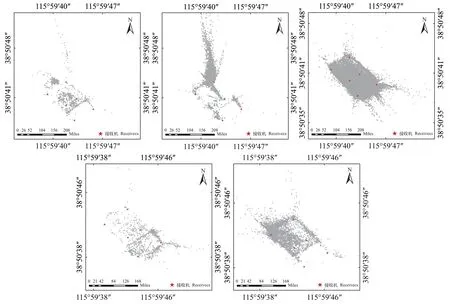
图4 标记鱼水平轨迹Fig. 4 Horizontal trajectory of the marked fish
2.4 野外标记监测
如图 5所示, 由日间接收量与夜间接收量的折线图可知其之间存在一定的区别, 而为探究接收机接收率在日间与夜间环境下是否存在统计学差异,取6个接收机在日间和夜间的接收量之差作出散点图并获取拟合曲线。如图 6所示, 所有接收机的日间接收量与夜间接收量之差所拟合曲线均位于直线y=0之上, 接收机R2、R3、R5和R6所拟合的一般线性模型均存在P<0.05, 说明模型具有统计学意义,此外模型斜率也均具有统计学意义(P<0.01,与y=0直线有显著差别), 因此可以得出日间接收量与夜间接收量存在显著性差异, 且日间信号接收效果较好。
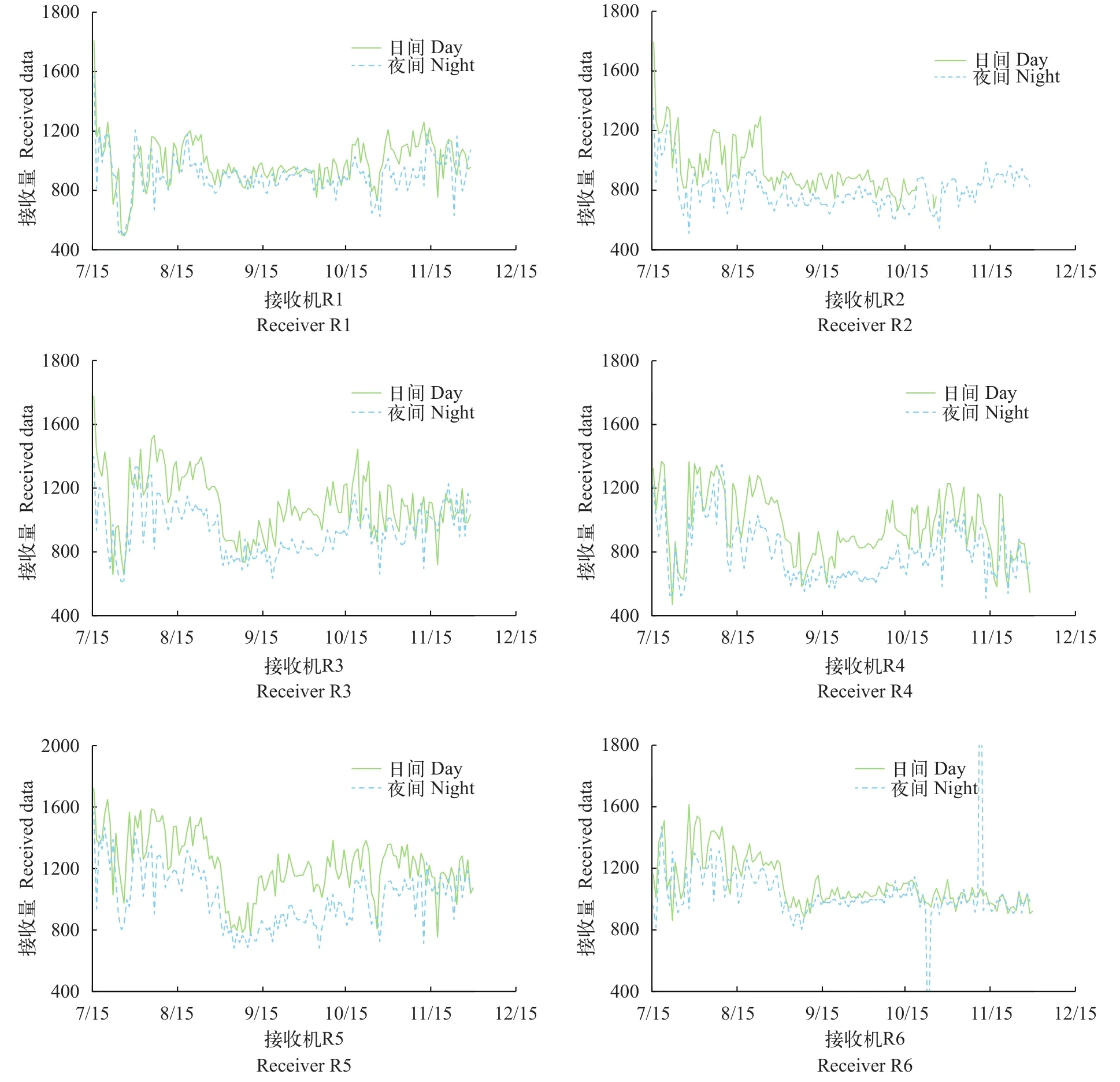
图5 日间接收量与夜间接收量Fig. 5 The reception in day and night

图6 接收机接收量日间与夜间之差Fig. 6 The difference between the reception of day and night
天气等级与接收量如图 7所示, 进行ANOVA方差分析后显示不同天气下接收量存在显著性差异(P<0.01), 说明接收量与天气具有显著相关关系。Tukey-Kramer法对不同天气下的多重比较发现晴天与小雨存在一定差异性(P<0.05), 而其他分组之间未见显著性差异。
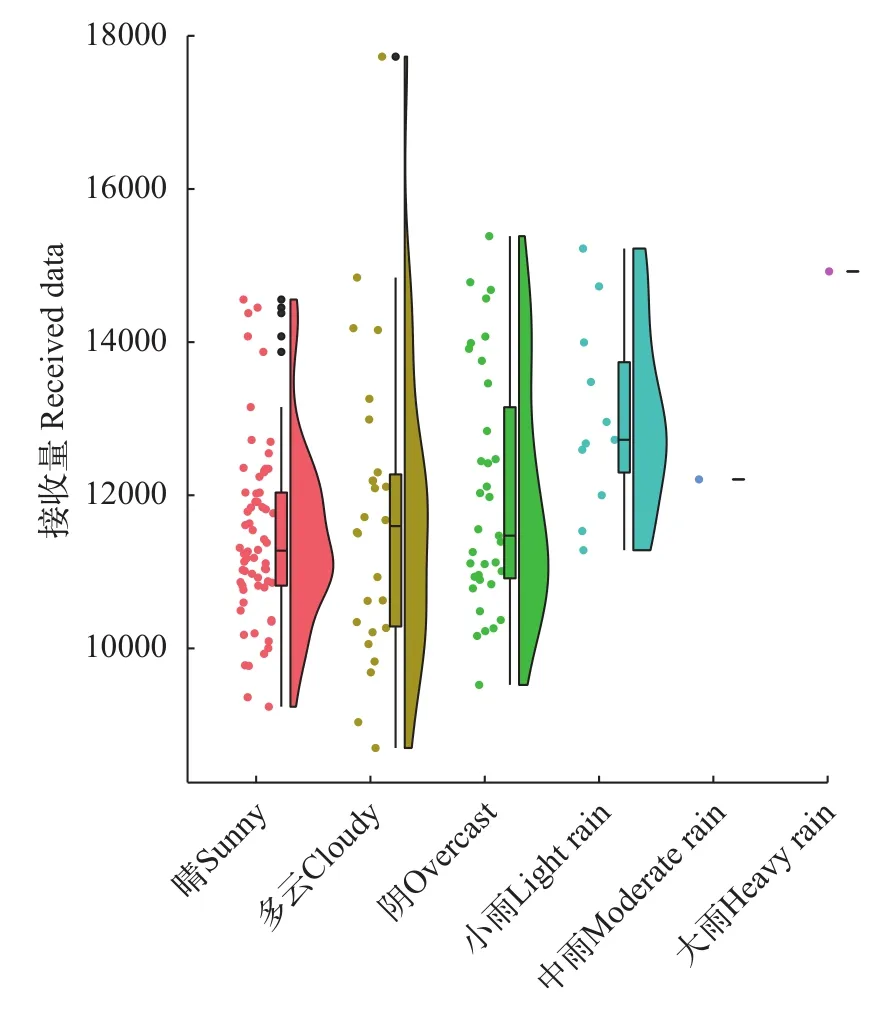
图7 天气状况与接收量Fig. 7 The weather and reception
温度与接收量逐日变化如图 8所示, 通过的Kendall和Spearman秩相关分析显示其之间的相关系数为0.11和0.17, 且均不具统计学意义(P>0.05),说明温度与接收量并不具有相关性。从趋势上看,接收机随着温度降低总保持较为平稳的接收量, 并不随温度变化。
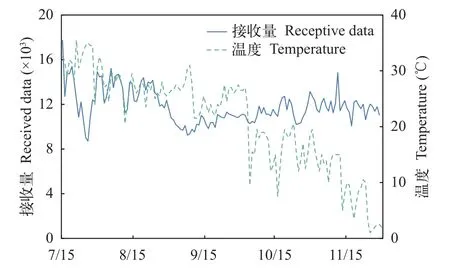
图8 温度与接收量逐天变化Fig. 8 The trend of the temperature and reception
3 讨论
3.1 标记与监测系统的评估
标记系统的核心在于发射器的附着方式及其对实验对象的影响, 其中手术植入法被认为是进行长期监测的最佳附着方式, 但目前手术植入法并未有一套完整的标准, 本研究发现手术法对于发射器不仅需要满足于“2%规则”, 还需要针对鱼类体型对发射器的植入位置进行筛选。对于狭长型鱼类(乌鳢), 在筛选实验鱼时应保证鱼体腹腔有足够空间容纳发射器; 发射器植入后需对鱼体腹部进行适当地舒缓按压, 以保证发射器不压迫肠道, 导致摄食与排泄受到影响。目前手术法对标记鱼的死亡、伤口愈合及行为状况等研究大多停留在效果评估层面, 并未深入探讨其解决或优化方案[27—31]。在手术过程中, 使用高溶氧或鱼类来源地水保持鱼体及鱼鳃湿润可减弱手术伤害, 而在本研究中鱼类来源地水质较差, 为防止伤口感染, 优先选择高溶氧水。伤口缝合应尽量使用三重结或四重结, 防止水流冲击造成缝合结散开, 但较多的方结可能会造成缝合线过长, 易滋生菌类导致伤口感染[32]。已有研究表明, 术后暂养的高温环境带来的负面影响较大并且不利的暂养环境会增大死亡率[25], 本研究优先使用高溶氧水源并在标记鱼最适生长温度下进行暂养, 最大限度减小手术带来的负面影响。
本研究发现日、夜间接收量存在显著性差异且日间接收量较大, 对比王志超等[18]研究显示, 这可能与夜间存在较大的背景噪声有关。在监测过程中, 风、雨、昼夜变化等干扰均会对接收效果产生一定的影响[18]。评估天气对接收量的影响发现晴与小雨的接收量存在一定的差异性(P<0.05), 说明雨天对于接收量存在一定的影响, 但中雨与大雨天气的数据量未达到统计学要求而舍弃, 因此在今后的研究中可进一步关注降雨量大小是否与接收量存在相关性。温度作为影响鱼类生活史行为的关键因素, 随着温度降低会减弱鱼类活动并让其躲避于礁石内。本实验通过Kendall和Spearman秩检验结果发现温度与接收量并无显著相关关系, 这可能与本实验区内并无较多可屏蔽信号的礁石和隐蔽区域有关。
3.2 鱼类活动特征
研究表明水生植被对维持整个水生生态系统结构、功能和稳定性方面具有决定性的作用, 同时为鱼类提供良好的繁殖、索饵和避敌场所, 且种植水生植被已成为丰富渔业资源和生态修复的重要手段之一[33—36]。本研究通过对凶猛肉食性鱼类乌鳢3个季度的追踪结果并对比水生植被覆盖度, 发现其大多喜好于水生植被密度较大的区域, 进一步直观展现出乌鳢在栖息地选择方面对水生植被的依赖性。已有研究表明在植被覆盖度较高的区域小型鱼类生物量与密度均显著较大[37], 这为乌鳢提供了丰富的饵料基础, 而水生植被亦为乌鳢提供良好的伏击场所, 这些因素可能共同造就了其对该区域的偏好性。但本研究也有部分标记个体对水生植被区的选择性并不显著, 这可能因为乌鳢的捕食方式介于伏击和追击捕食之间, 且实验区水体透明度并不高(全年平均透明度为1.02 m), 同时当乌鳢摄食后食欲有所下降, 这些均降低了乌鳢对隐匿型水生植被区的需求。
3.3 应用前景
本次研究构建了浅水草型淡水湖泊的生物遥测系统, 以两种经济型鱼类(乌鳢与鲫)为实例, 采用手术法植入发射器, 历时3个季度完成, 同时评估了不同环境因子对接收量的影响。现阶段研究主要是追踪体系的构建, 在今后的研究中, 可充分考虑杂食性鱼类与草食性鱼类, 并增大追踪面积和增加追踪时间, 建立标准的研究体系, 为人工鱼礁等生态修复工程的规划与实施提供参考, 同时也能够评价其修复效果。在研究洄游性鱼类行为方面, 可探测其洄游路径、产卵场和在自然条件下生活史行为的变动, 这对珍稀鱼类的保护具有深远的意义。目前生物遥测系统的构建成本较大, 无法完成较大规模的研究, 若能在改进技术的同时共用接收机、共享追踪数据成果, 将能有更大的应用前景。