多航态无人艇混合动力系统设计
2022-06-09匡曙龙杨一鹏邱长青
匡曙龙,杨一鹏,邱长青,李 鹏
应用研究
多航态无人艇混合动力系统设计
匡曙龙,杨一鹏,邱长青,李 鹏
(船舶综合电力技术重点实验室,武汉 430064)
以未来海上智能化作战为牵引,发展跨介质平台,满足跨介攻击智能化作战需求。本文开展了多航态无人艇混合动力系统设计研究,对于混合动力系统存在多种运行模式而言,各工作模式的切换控制相较于单一工作模式控制更为复杂。根据无人艇不同航态及任务需求设计动力系统切换模式方案,实现了快速、稳定的工作模式切换功能。验证了混合动力系统的可靠性与稳定性,提升了系统效率。
跨介质 多航态无人艇 可靠性 混合动力系统
0 引言
多航态无人艇是一种集水面舰艇与水下航行器于一体的新型智能无人艇,能够根据任务需求实现水面、半潜、水下全潜三种航态的自主切换,具有水面高速航行的特点,迅速进入目标区域执行相应任务后转场撤退;又具有水下航行器的隐身特性,利用桅杆与水面基站进行连接通信,从而实现信息交互和隐蔽的目的,可长时间对目标海域进行潜伏侦测。无人艇智能控制系统快速切换航态功能,完成环境信息感知,提高任务执行机动性[1~3]。
动力推进系统与智能控制系统相辅相成,以满足无人艇水面和水下工作要求,针对不同工况和运动特性设计高功率密度的混合动力推进系统,为有限的空间提供更高的动力,兼顾多航态下工作环境和动力需求[4,5]。智能控制系统帮助混合动力推进系统快速响应,保证系统切换的快速性、稳定性和可靠性,使得整个混合动力推进系统安全运行,通过混动控制策略提高系统的使用寿命和续航能力。
本文首先进行了混合动力系统运行模式分析。无人艇由电力推进模式驱动,实现系统节能环保、零排放、高隐身性的目的;无人艇由柴油机模式驱动,系统能量转换环节最少,系统可靠性最高,不存在复杂的驱动模式组合,避免了加速过程中的迟顿;无人艇由机电模式驱动,系统输出最大功率,机电深度混合,系统较为复杂,并且柴油发电机组、动力电池系统相互冗余,供电冗余性高[6,7]。然后进行了混动动力系统控制设计,设计了不同工作模式下的驱动方式和工作流程。最后对不同模式之间的切换进行了仿真分析,验证了系统设计的可靠性。
1 混合动力系统运行模式分析
多航态无人艇主要具备吨位小、航速高、机动灵活的特点。无人艇处于水下低速航行时,一旦遇到紧急情况,需浮至水面立刻进入中高速航行模式,并且保证足够的动力储备,以确保无人艇在高速航行时快速机动的动力响应需求。
1.1 混合动力模式
混合动力模式的设计目的在于提高各工况下的混合动力系统能量转换效率,提高热机的燃油经济性,同时提升使用无人艇低速航行的隐身性。从而在充分满足航行以及用电负载需求的基础上,实现系统节能环保、高隐身性的目的。
1)无人艇水下低速航行
当无人艇水下低速航行时,主要通过电力推进模式驱动无人艇运行。在动力电池电量充足的情况下由无人艇动力电池供电提供推进动力,以及供应本艇交流负载用电,此时处于零排放运行模式。水下低速航行时动力电池供电能量流向示意如图1所示。

图1 水下低速航行时动力电池供电能量流向示意图
当动力电池处于电量不足的情况下,自动浮出水面切换至柴油机动力模式。
2)无人艇水面提速航行
当无人艇水面提速至经济航行速度时,由两台柴油机组供电提供推进动力,两台电机可转换为轴带发电模式,为无人艇交流负荷用电。同时,通过动力电池吸收富裕功率,维持动力电池的存储电量不低于设定的最低电量。此时,该工况与柴油动力模式一致,水面提速航行时柴油机动力模式系统能量流向示意如图2所示。
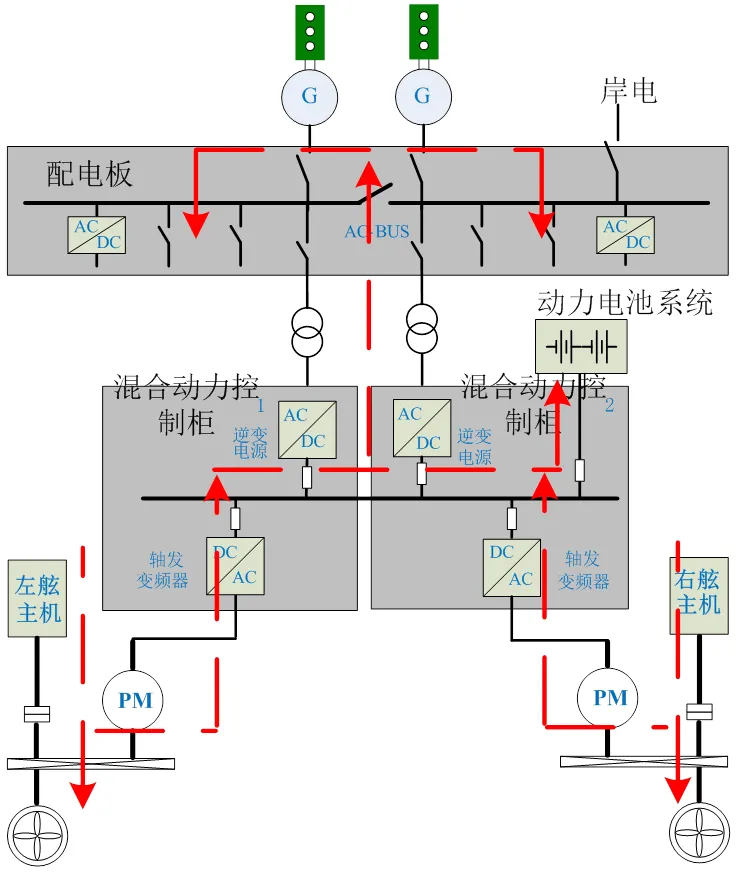
图2 水面提速航行时柴油机动力模式系统能量流向图
3)无人艇水面高速航行
当无人艇推进档位进入高速航行时,无人艇工作模式切换为两台主推进柴油机和两台轴发电机联合驱动模式。当动力电池处于电量不足的情况下,自动降速至经济航行速度,水面高速航行时柴油机与动力电池联合驱动模式系统能量流向示意如图3所示。

图3 水面高速航行时柴油机与动力电池联合驱动模式系统能量流向示意图
1.2 其他工况模式
1)低功耗待机工况
低功耗待机工况下,轴带变频模块处于带电就绪状态,推进输出功率为0。此时无人艇主要负载为日用负荷以及部分航行负载。根据动力电池容量剩余度,可分为2种供电模式:一种是电池电量充足的情况下,可以采用动力电池提供全艇用电模式;另一种是若电池电量到限制容量(限制值可设定),则切换至单台柴油发电机组供电模式。
2)停泊工况
停泊工况下,无人艇停靠在码头。此时可通过码头交流岸电箱为无人艇供电,通过无人艇交流电网为直流电网进行供电,然后通过电池充放电控制模块进行电池充电管理,无需在码头配置电池专用充电桩,减少了码头的改造成本。
能量管理系统可以控制电池充放电控制模块对动力电池进行健康充电管理,充分延长动力电池的使用寿命;同时监测电池充电过程中的实时状态,进行充电保护管理,提升设备安全性。
2 混合动力系统控制设计
2.1 混合动力系统控制策略
本文混动控制采用逻辑控制策略,针对电池剩余容量、航速需求,设置门限值,保证满足本艇工况的情况下,将发动机工作点限制在高效区间内。以电机作为系统的“灵活因素”,在低负荷时代替发动机工作,较高负荷时以发电机方式运行以提高发动机负荷,使发动机始终工作在效率较高的区间内。
本文中主柴油机和动力电池有四种工作状态可供选择,不同的工作模式对应不同的主柴油机状态和动力电池状态,其对应关系见表1所示。
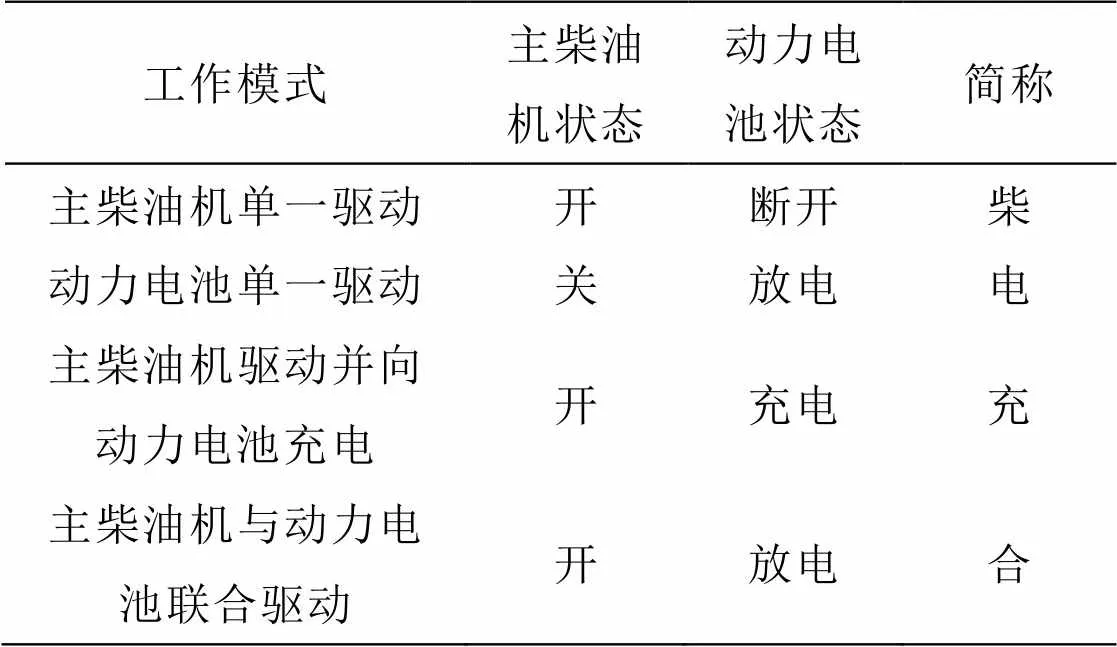
表1 主柴油机与动力电池工作状态
根据柴油发动机的工作特点和混合动力系统的运行规律,在何种条件下执行何种模式,每种模式下柴油机和电机输出功率各占多少、在转矩-转速平面上处于哪个工作点,是控制策略所要解决的问题,如图4所示。

图4 基于控制策略的混合动力系统图
针对无人艇航行规则设定:以SOC、航速为变量划分区块,决定电机、柴机的功率分配,根据需求航速决定模式的切换。
当无人艇处于水下低速航行时,航速低于某限值且SOC高于30%,电池单独驱动;
当无人艇处于水面提速航行时,SOC低于30%,主柴油机单一驱动,并提供额外的转矩给电机,此时主柴油机负荷足,工作条件好,燃油经济性高,电机以发电方式工作,并采用恒流模式给电池组充电;SOC大于85%,主柴油机单一驱动,主柴油机额定功率较大,采用恒压限流给电池组充电至SOC达到100%后停止充电。
当无人艇处于水面高速航行时,SOC大于30%,电机、柴油机联合驱动;当电量不足时,这一模式不能实现。
当航速处于低速与中低速时或电量均处于中等水平时,系统保持原有工作模式不变,避免频繁切换引起的损耗。
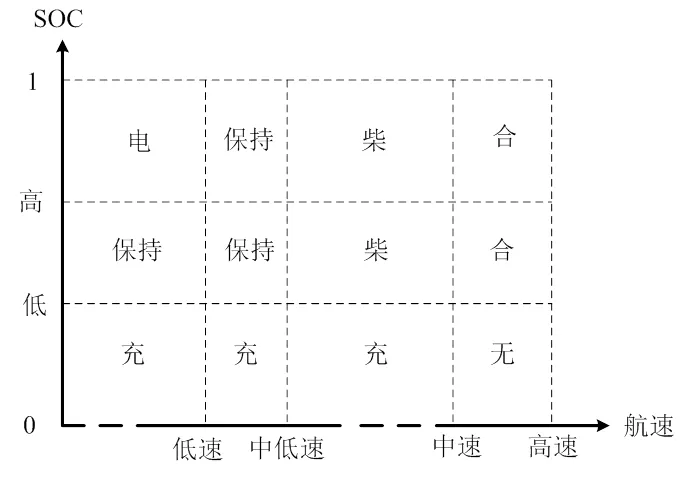
图5 主柴油机与动力电池的工作状态切换
工作状态切换取决于无人艇负载条件和动力电池电量储备,可以根据一定的逻辑规则自动选择,如图5所示。
2.1 混合动力系统控制方案
1)动力电池单一驱动功能
混合动力控制柜应在外部指令给定纯电动模式工况下,实现无人艇纯电池动力驱动的功能如图6所示。
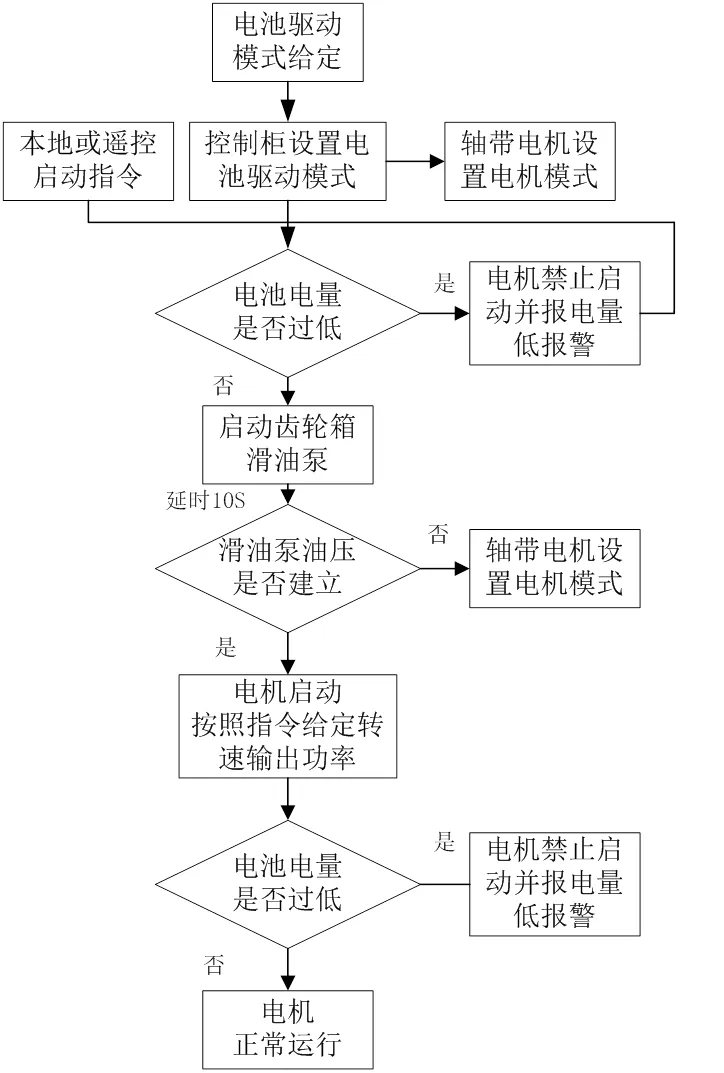
图6 动力电池单一驱动功能
当遥控系统给定水下航行任务时,混合动力控制柜控制模式切换为纯电动驱动模式,轴发变频器运行模式处于电机模式。
混动控制器接收本地或遥控控制启停指令,接收到启动指令后,首先启动齿轮箱滑油泵,滑油泵启动并确认油压建立后,可启动轴带变频器控制轴带电机跟随转速给定指令进行功率输出。
纯电动驱动模式下,应实时判断电池电量以及电池输出电压,当电池电量低情况下,应限制输出功率,当电池电量过低时,应停止轴带变频器并禁止启动。
2)主柴油机单一驱动功能
当无人艇处于水面提速航行状态时,混合动力控制柜应在外部指令给定主机推进模式工况下,实现无人艇主机动力驱动的控制功能如图7所示。
当遥控系统给定主机模式时,混合动力控制柜控制模式切换为主机驱动模式,当工况切换完毕后,轴发变频器运行模式切换为轴带发电模式。
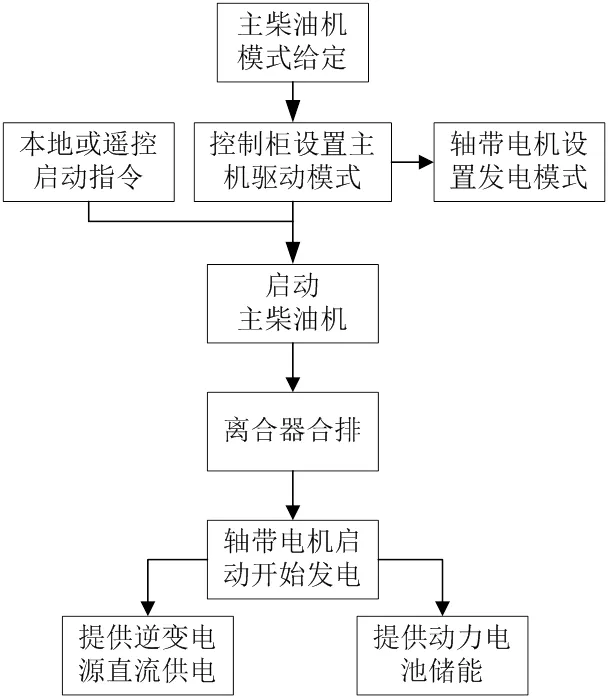
图7 主柴油机单一驱动功能
混动控制器接收到本地或遥控控制启停指令后,启动推进主机,随后控制齿轮箱主机侧离合器合排,合排后主机可根据遥控指令进行转速输出。主机驱动模式下,主机富裕功率通过轴带驱动变频器进行轴带发电,一方面提供逆变电源直流供电,另一方面为电池进行储能。
3)主柴油机与动力电池联合驱动功能
当无人艇处于水面高速航行状态时,混合动力控制柜处于主机驱动模式及轴发变频器运行模式处于电机模式,如图8所示,动力电池采用冗余电源设计,增强了无人艇在全速航行模式下的供电连续性,提升无人艇航行安全性。动力电池一方面给逆变电源供电用于无人艇交流负载用电,另一方面可作为在网柴油发电机组的供电热备电源,避免轴发电动/发电机故障切换机组时所带来的短时失电,增强了系统的供电连续性,提高了航行的安全性。
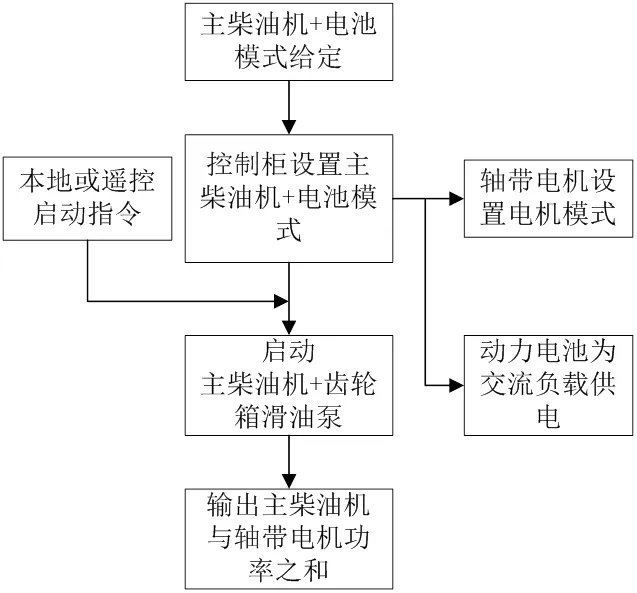
图8 主柴油机与动力电池联合驱动功能
3 仿真验证
为了验证上述分析的正确性,在Matlab软件中对混合动力系统进行了建模仿真,如图9所示。

图9 混合动力系统仿真模型
其中电池组选用277 Ah磷酸铁锂电池,截止电压670 V,SOC为70%,额定电压650 V,能量容量为175 kWh。柴油机1 350马力,电机额定功率100 kW,输入为三相交流电压400 V,频率50 Hz,额定转速1 500 rpm。另有负载及逆变电源,电压650 V,工作电流20 A。
1)PTO(发电机模式)工作模式仿真
直流电抗器电感量为200 mH,直流母线电压650 V,充电电流30 A,负载电流20 A。
如图10所示,电机处于发电状态,充电电流29 A,纹波电流小于4 A,母线电压纹波小于1 V。

图10 电机PTO发电模式电流变化曲线
2)PTO模式到停机状态
如图11所示,电机由PTO模式转为PTI(电动机模式)模式需先停机,再进行模式切换,电机停机后,电池由充电30 A,转为20 A放电,为负载提供电能。电流在0.05 s内有40 A波动。

图11 电机由PTO模式转为停机状态电流变化曲线
4 结论
本文通过对多航态无人艇混合动力系统进行设计和仿真分析可知,水下低速巡航工况下,无人艇由电力推进模式驱动,实现系统节能环保、零排放、高隐身性的目的;水面提速航行工况下,使用柴油机动力模式,系统能量转换环节最少,系统可靠性最高,并且从低速加速至中高速过程中仅由柴油机直接加速,不存在复杂的驱动模式组合,避免了加速过程中的迟顿;水面高速航行工况下,系统输出最大功率,机电深度混合,系统较为复杂,并且柴油发电机组、动力电池系统相互冗余,供电冗余性高;系统的动力源依次根据推进功率变换而依次进行组合,确保从每个模式切换至下一个模式时,系统的功率储备裕量,以此提高系统燃油经济性,提升系统效率。
[1] 曹晓光, 肖飞, 高巍. T—CRAFT:美军新型变形双体概念舰[J]. 环球军事, 2010(19): 46-47.
[2] 孟庆国, 田正东. 国外海军新概念舰艇研究综述[J]. 舰船科学技术, 2011(05): 139-145.
[3] 林龙信, 张比升. 水面无人作战系统技术发展与作战应用[J]. 水下无人系统学报, 2018.
[4] 夏琦, 王奎, 韩志强,等. 能量管理系统在混合动力船舶的应用和前景分析[J]. 中国科技论文, 2017, 12(022): 2637-2640.
[5] 张敏敏, 康伟. 一种混合动力电动船舶能源管理系统的设计[J]. 中国水运(下半月), 2011(12): 67-69.
[6] 肖能齐, 徐翔, 周瑞平. 船舶柴电混合动力系统能量管理控制策略[J]. 哈尔滨工程大学学报, 2020, 41(1): 8.
[7] 徐振峰. 柴电混合动力船舶推进系统方案评估研究[D]. 武汉理工大学, 2018.
Design of hybrid power system for multi-navigation unmanned craft
Kuang Shulong, Yang Yipeng, Qiu Changqing, Li Peng
(Key Laboratory of Marine Integrated Power Technology, Wuhan 430064, China)
U664.82
A
1003-4862(2021)05-0060-05
2021-11-05
匡曙龙(1994-),男,助理工程师。研究方向:无人动力系统。E-mail:kuangshulong@163.com
