基于半实物仿真平台的倒立摆系统PID控制研究
2022-06-09王丽琴
王丽琴
应用研究
基于半实物仿真平台的倒立摆系统PID控制研究
王丽琴
(渤海船舶职业学院,辽宁兴城 125105)
为了研究倒立摆系统控制的动态性能,设计基于硬件平台、MATLAB和组态软件相结合的半实物仿真控制平台。在此平台上建立单级倒立摆数学模型,对系统进行PID控制研究,分别从单闭环PID控制方法和双闭环PID控制方法上研究单级倒立摆的运动情况,得到实时的运动动态特性曲线。结果显示,双闭环PID控制方法在参数合理的情况下,能够使系统达到稳定。验证倒立摆系统的可控性和倒立摆半实物仿真平台的可实现性。
半实物仿真 倒立摆 PID控制 MATLAB 动态特性
0 引言
倒立摆系统是不稳定系统,具有非线性和强耦合等特点。它广泛用于控制理论研究、航空航天控制、机器人控制和自动化研究等领域[1]。
在倒立摆控制仿真研究领域,大多数仿真方法都是从数学模型角度出发,在设计过程中做了大量的假设。这些假设往往忽略了系统中很多重要的因素,使仿真结果不能够体现真实现象。利用半实物仿真技术,则可以克服上述缺点,使倒立摆的控制研究更接近于实际情况。本文对基于半实物仿真平台的单级倒立摆系统的PID控制进行研究,从倒立摆的功能、性能、受力和运动控制上对其进行可视化仿真模拟,采用软件与硬件结合方法,使结果更加逼近真实效果。
1 单级倒立摆数学建模[2]
单级倒立摆系统的原理框图如图1所示。
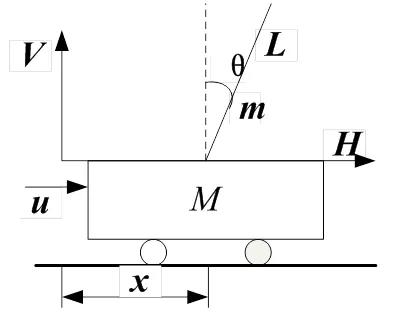
图1 单级倒立摆系统原理图
图中小车质量为;摆的质量为;小车位置为;摆的角度为;是输入,相当于控制力;是摆的长度;是重力的力臂,相当于1/2摆长;表示垂直方向;表示水平方向。
式中,
2 半实物仿真平台
半实物仿真是将控制器(实物)与计算机上实现的控制对象的仿真模型连接在一起进行试验的技术。
2.1 系统的结构
整个系统共分为3部分:控制器、虚拟单级倒立摆与上位机,系统框图如图2所示。

图2 倒立摆半实物仿真系统框图
控制器主要完成倒立摆系统中小车位置、小车速度、摆杆角度和角速度等状态传感器模拟量的采集,并根据实时的状态信息,运行控制算法,输出控制量。
虚拟负载接收控制器的控制量,将控制量通过串口发送给上位机中的倒立摆数学模型,控制系统的运动,同时将上位机传输过来的系统的状态位置、速度、角度等信号转换为4~20 mA的传感器电流信号,输出给控制器。
上位机软件主要用于实现倒立摆数学模型以及动画显示倒立摆的工作状态。
2.2 软件设计
虚拟样机的软件主要功能是实现建立倒立摆数学模型运算和以动画的形式显示倒立摆状态。主要包括两部分:通信与数学模型实现、实时运动动画显示。由前面倒立摆数学模型公式可知,其模型非常的复杂,包含矩阵、积分和微分运算。考虑到运算的复杂程度,采用MATLAB软件来实现虚拟倒立摆数学模型计算,实时的计算出倒立摆系统的运动状态,同时用MATLAB实现串口通信,实现与下位机硬件平台控制量、状态信息的实时数据交互。本系统的动画实时显示界面由组态王软件实现。组态王软件是一款工业中常用的界面设计软件,可用于快速的设计交互式的人机界面。本系统中的界面主要完成以动画的形式显示运动的实时过程和参数信息,可以使系统更加形象直观。
MATLAB与组态软件之间通过DDE实现数据的共享。在windows环境下,DDE是一个不同数据系统之间共享数据的协议[3],是在应用程序之间实时交换数据的一种有效方法。
DDE软件的设计是通过在MATLAB/Simulink中编写S函数来实现,并以M文件的形式存在[4]。
通过DDE,MATLAB可以将倒立摆数学模型运算出来的实时的角度、速度等状态信息传给组态王软件进行实时显示。
3 系统的PID控制研究
PID控制是最早发展起来的一种控制方法[5],具有原理简单、直观易懂、易实现、鲁棒性强等优点,所以在实际的控制系统中仍有超过90%的采用PID控制器进行控制运算[6]。本文给出两种PID控制方法的分析,并对结果进行了比较。
3.1 摆杆角度单闭环PID控制
对于一级倒立摆在摆杆的初始状态为垂直向上的状态下,加一扰动后采用对角度单闭环PID的控制下的角度和位置的响应进行研究。角度单闭环控制框图如图3所示。

图3 倒立摆单闭环PID控制框图
图3中,()为我们所期望的倒立摆的稳态,()为我们所加的扰动。计算得到角度的传递函数为:

经过多次参数调整后,令kD=15,kp=130,kI=1得到的曲线为:
从图4中可以看出,此时系统的响应时间不到1 s,能使角度快速到达稳态。在摆杆角度单闭环控制的状态下,计算得到小车实时位置传递函数为:

在上面的PID参数情况下,得到位置的实时曲线见图5所示。
从图5中可以看出,在角度单闭环PID控制情况下,小车的位置会失控,会沿一个方向一直运动,产生“撞墙”现象。
综上所述,在摆杆角度单闭环PID控制方法控制下,摆杆的角度可以在短时间内到达稳定状态,但小车的位置会出现“撞墙”现象,此种方法实际中不适合应用,达不到控制的效果。
3.2 双闭环PID控制
为了解决单闭环PID控制中出现的问题,将摆杆的角度和小车的位置两个状态量作为反馈量,构成双闭环系统,分别对角度和位置进行PID控制[7],系统的框图如图6所示。

图6 双闭环PID控制方案
控制的目标是摆杆的角度和小车的位移全为零。采用数字位置式PID控制算法对倒立摆进行控制,控制算法表达式为:

积分控制作用是消除误差,但是积分项的存在使系统出现超调,由于倒立摆是一个不稳定系统,为了防止出现小车“撞墙”和角度过大问题,令积分项系数为0。得到仿真结果如图7所示。
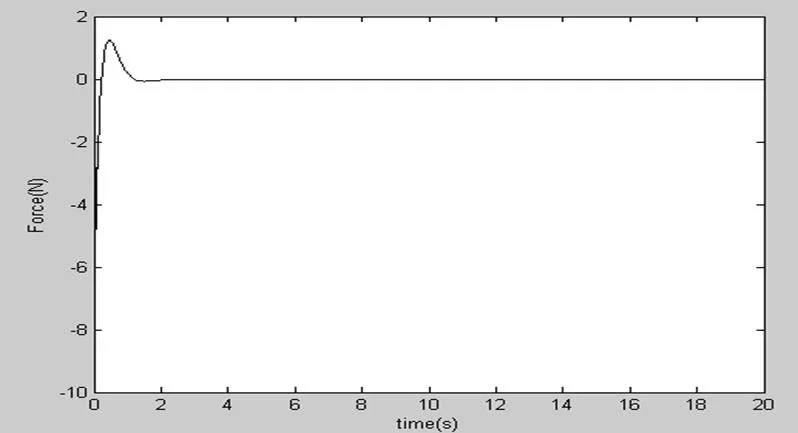
从图7可看出,采用双PID控制算法,系统达到稳定状态,且不会出现“撞墙”现象。由角度和位置的双闭环PID系统控制可以看出,采用软件和硬件相结合倒立摆半实物仿真平台的设计方案可行的。通过该仿真平台可方便直观的对倒立摆进行仿真模拟和控制研究。
4 结论
利用软硬件结合的设计方案,使得设计的仿真系统更加接近于实际的情况,能真实的模拟实际倒立摆系统的运动、受力等情况。通过控制分析,验证了倒立摆系统的可控性与可预测性。同时验证了倒立摆半实物仿真系统的可行性,该设计成本低、使用方便,在教学实验和实际现场都能得到实际的应用,而且控制器中可使用其他的算法来进行设计,能方便、直观的观察各种算法的控制结果。
[1] 辛静, 赵高晖, 李天箭, 杨培培. 倒立摆系统控制研究[J]. 电子科技, 2016, 29(12): 159-161.
[2] 彭娟. PID控制的小车倒立摆控制系统数值计算[J]. 机电技术, 2016, 10: 34-36.
[3] 于勇, 杨黎明. 利用DDE实现VB对MATLAB的控制[J]. 电脑编程技巧与维护, 2000: 29-33.
[4] 关业伟, 鲁凯生. 组态王和MATLAB的DDE应用程序[J]. 航海工程, 2005, 6: 50-52.
[5] 胡小莺. 二级倒立摆PID与LQR控制的对比研究[J]. 伺服控制, 2011, 1: 55-57.
[6] 晁勤, 傅成华, 王军. 自动控制原理[M]. 重庆: 重庆大学出版社, 2001: 107-129.
[7] 丛爽. 单级倒立摆三种控制方法的对比研究[J]. 系统工程与电子技术, 2001, 23(11): 47-50.
[8] 刘金琨. 先进PID控制及其MATLAB仿真[M]. 北京: 电子工业出版社, 2003: 224-231
Research on PID control of inverted pendulum system based on hardware in loop simulation platform
Wang Liqin
(Bohai Shipbuilding Vocational College, Xingcheng 125105, Liaoning, China)
TP13
A
1003-4862(2022)05-0022-03
2021-08-30
王丽琴(1982-),女,副教授,主要从事电气自动化教学研究工作。E-mail: wangliqin2006@163.com