基于滑模扰动观测器的电力系统混沌振荡控制
2022-06-09孙建龙刘郦雅阳习党
孙建龙,刘郦雅,阳习党,肖 欢
应用研究
基于滑模扰动观测器的电力系统混沌振荡控制
孙建龙1,刘郦雅2,阳习党3,肖 欢3
(1. 武汉新能源接入装备与技术研究院有限公司,武汉 430205;2. 北京博望华科科技有限公司,北京 100068;3. 海军工程大学 舰船综合电力技术国防科技重点实验室,武汉 430033)
为了解决外界周期性负荷扰动而引起的电力系统混沌振荡问题,提出了一种基于新型指数趋近律方法的非奇异终端滑模扰动观测器控制算法。采用非奇异终端滑模面进行控制器的设计,同时设计一种扰动观测器在线实时观测负荷扰动,并将此观测器作为非奇异终端滑模控制器的前馈补偿项,抵消电力系统周期性负荷扰动的影响,抑制电力系统混沌振荡,使其恢复到同步运行状态。仿真结果验证了所提出方法的具有较好的快速收敛特性和较强的抗扰动能力。
电力系统 混沌振荡 趋近律 扰动观测器 非奇异终端滑模控制
0 引言
混沌是一种存在于确定性非线性系统中的貌似随机的不规则运动,是系统内部参数相互作用而导致的一种非常复杂的现象[1]。而电力系统作为典型的非线性动力系统,当电力系统的参数发生变化或受到外界周期性负荷扰动的影响时,电力系统就可能产生持续性、非周期和无规则可循的混沌振荡现象[4]。电力系统混沌振荡现象的产生会严重影响电力系统的电能质量,甚至会导致电力系统的失稳或崩溃[5]。因此,研究如何抑制电力系统混沌振荡的先进控制算法,具有重要的现实意义。
近年来,由于非线性控制理论的快速发展,针对电力系统混沌振荡控制也越来越引起广大科研工作者的重视。主要包括反馈控制[6],滑模控制[7-9]等方法。与其他控制策略相比,滑模控制是一种特殊的非线性控制方法,由于其结构简单、性能可靠、对参数变化和外部干扰具有很强的鲁棒性,在电力系统中得到了广泛的应用[10-14]。然而,它也有一个缺点,即通过增加滑模切换增益来抑制外部干扰和参数变化,因此外部干扰和参数变化的存在将不可避免地导致抖振问题。
为了解决上述问题,本文以二阶电力系统为例分析了特定参数条件下的混沌振荡现象,并在此基础上了提出了一种基于非奇异终端滑模扰动观测器的电力系统混沌振荡控制方法。将该方法与现有控制算法进行对比,验证该算法的抗扰动能力和动态性能。
1 电力系统混沌振荡模型
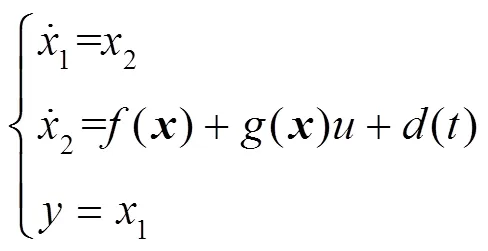
本文以二阶电力系统中存在的混沌振荡为例,首先给出其简化的数学模型为[4-5]:


定义系统的状态变量1=,x=,将模型式(1)写成一般形式,即


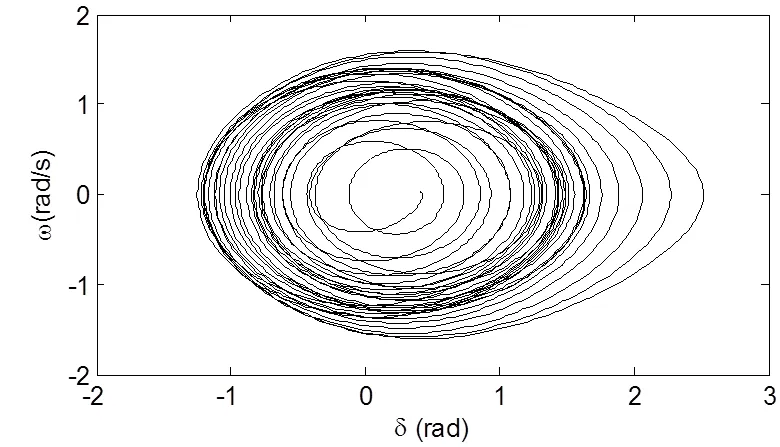
图1 电力系统混沌振荡的相轨迹图
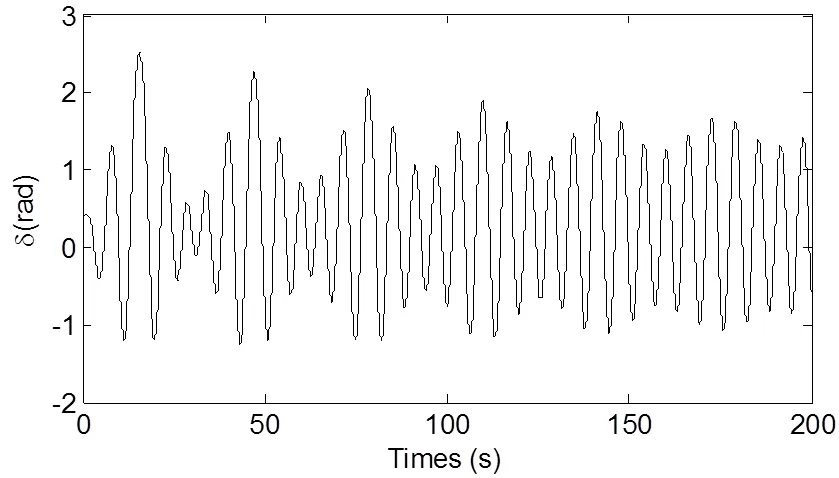
图2 电力系统混沌振荡的时序图
2 基于新型趋近律的抗扰动非奇异终端滑模控制器设计
2.1 新型趋近律设计及其特性分析



下面详细分析文中所提新型趋近律的滑模特性。根据滑模可达性,结合式(5)及条件>0,>0,>0,>0,>0,有
因此,所设计的趋近律满足滑模可达性条件。当系统初始状态(0)>0时,新型趋近律式(5)变为
为了便于计算,对式(7)进行简单的变换,有

对式(8)求积分可得
到达滑模面时()=0,则从初始状态到达滑模面的时间为

当系统初始状态(0)<0时,证明过程同上。因此,采用趋近律(5)可使系统在有限时间内从任意初始状态到达滑模面。
2.2 抗扰动非奇异终端滑模控制器设计
用本文提出的趋近律方法,设计一种抗扰动非奇异终端滑模控制器以抑制电力系统中的混沌振荡问题。对于非线性系统(3),选取滑模面函数
设计一种抗扰动非奇异终端滑模控制器为

扰动观测器为
下面对整个控制系统的稳定性进行分析,定义Lyapunov函数为:

对(14)求导,并将(12)代入可得



为了消弱系统抖振的影响,选取sigmoid函数替代符号函数sgn,其表达式为[15]


3 仿真结果分析
1)采用文献[11]中的趋近律方法,设计电力系统混沌振荡的非奇异终端滑模控制器的表达式为:

2)采用文献[12]中的趋近律方法,设计混沌振荡的非奇异终端滑模控制器的表达式为:
为了对三种控制器进行对比分析,仿真中系统的状态变量的参数设置保持相同,且控制器的参数也保持一样,即=3,=5,l=0.25,=0.05,=1.0,=10, c=5。另外,本文控制算法的控制器参数选取为=3,=5,==3,其余参数相同。其仿真结果如图3~5所示。
图3为电力系统混沌振荡的功角的变化曲线,图4为功角与角速度的相轨迹图。从图3中可以看出,系统状态变量功角分别在文献[11]和文献[12]所提出的控制器的作用下,功角从初始值达到稳态时所需要的时间分别约为3 s和2 s。虽然文献[12]的控制方法比文献[11]的方法控制性能好,但两种方法的调节时间较长。而采用本文所设计的控制算法,功角到达稳态时的时间约为1.7 s,小于文献[12]所提出的控制算法。因此,对三种控制算法下的仿真结果进行对比分析,证明了在本文所提控制策略能够使混沌振荡的电力系统用更快的时间恢复到同步状态。
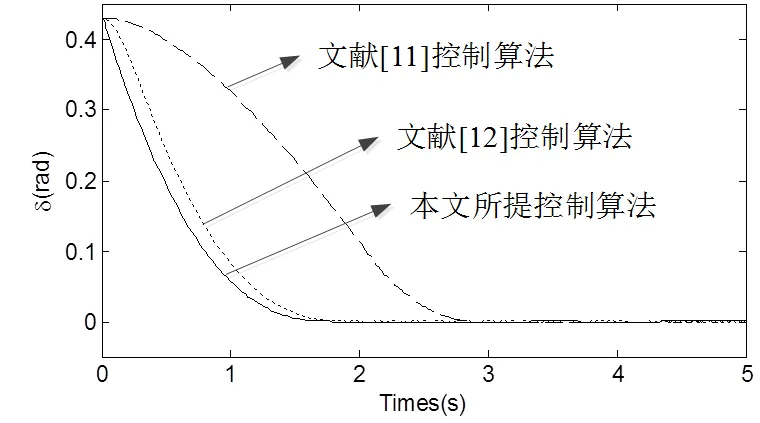
图3 功角d的变化曲线
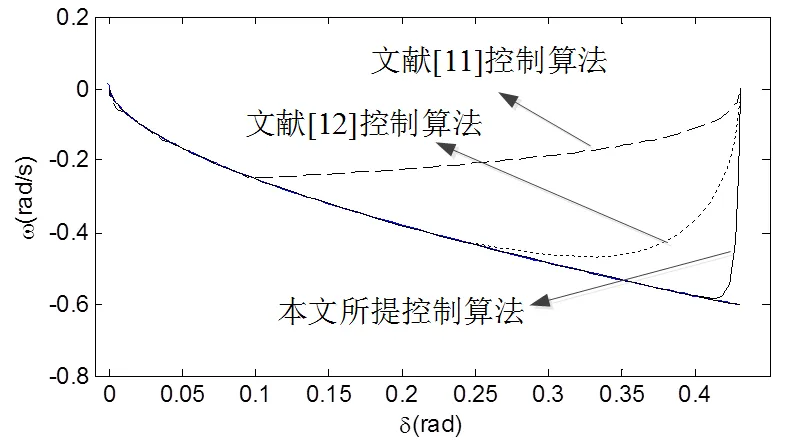
图4 功角与角速度的相轨迹图
从图4所示的功角与角速度的相轨迹图同样可以发现,与文献[11]和[12]所提控制算法相比,本文所提控制算法的功角与角速度的相轨迹图都具有更快的收敛速度,更好的控制品质。
为了验证所提控制算法抑制抖振现象的能力,图5给出了三种控制算法的控制器变化曲线,从图中可以发现,相比其他两种控制算法,本文所提控制算法的控制量输入比较平滑,幅值也较小,抖振现象也得到了较好的抑制。
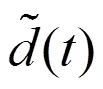
综上所述,相比其他两种控制算法,本文提出的控制策略无论是动态响应速度,还是控制器的抖振抑制能力,都具有较好的控制性能。因此,所提控制算法能使混沌振荡的电力系统更快地恢复到同步状态。
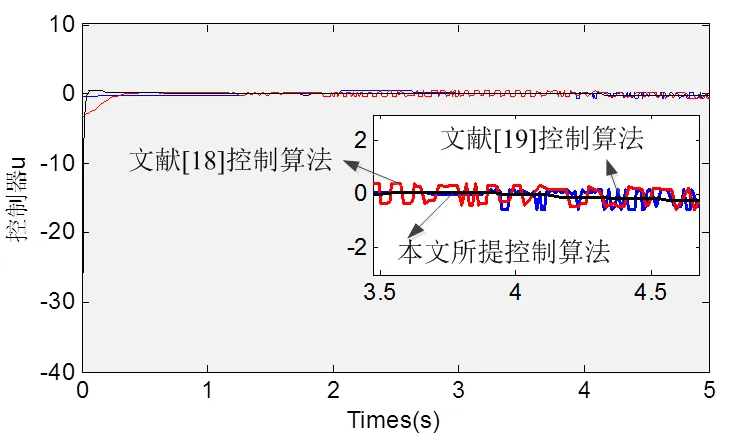
图5 受控系统控制输入随时间变化图
图6 扰动观测器的观测性能
4 结论
电力系统是作为一类复杂的非线性系统,在一定条件下其必然会发生分岔、混沌现象。为了消除电力系统混沌振荡的影响,提出了一种基于新型趋近律的抗扰动非奇异终端滑模控制策略,使电力系统能够快速恢复同步运行状态。文中提出的新型趋近律可根据系统状态变量距离平衡点的远近自适应增大指数趋近速度,减小等速趋近速度,以保证在快速趋近的同时削弱抖振。另外,为了消弱电力系统中周期性负荷扰动的影响,提出了一种基于扰动观测器的非奇异终端滑模控制算法,抑制了电力系统混沌振荡。仿真结果表明所提控制算法的可行性和有效性。
以二阶电力系统为例分析了特定参数条件下的混沌振荡现象,提出了一种基于非奇异终端滑模扰动观测器的电力系统混沌振荡控制方法。该方法设计了一种改进的能随着状态变量的变化而自适应调节传统指数趋近律的设计参数,并将自适应指数趋近律方法与非奇异终端滑模控制相结合,设计了适用于电力系统混沌振荡的非奇异终端滑模控制算法。同时为了消弱电力系统中外界扰动的影响,设计一种扰动观测器在线观测扰动变量。仿真结果表明,所提控制算法能使混沌振荡的电力系统更快地恢复到同步状态。
[1] Chen X W, Zhang W N, and Zhang W D. Chaotic and Subharmonic Oscillations of a Nonlinear Power System[J]. IEEE Trans. Circuits Syst. II, Express Briefs, 2015, 52(12): 811–815.
[2] Yang Z C, Zhang C L, Ge L. Model free adaptive fuzzy supervisory control design for electric power system[C],Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, Kumamoto, Japan, August 10-12, 2016.
[3] Li X, and C.A. Caizares, Chaotic behavior observations in a power system model[C]. 2009 IEEE Bucharest, Power Tech., Romania, pp.1-5, 2009.
[4] H. Mokayed, and A. Mohamed. A robust thresholding technique for generic structured document classifier using ordinal structure fuzzy logic[J].International Journal of Innovative Computing, Information and Control, 2014, 10(4): 1543-1554.
[5] I. Sadeghkhani, A. Ketabi, and R. Feuillet. An intelligent switching over voltages estimator for power system restoration using artificial neural network[J]. International Journal of Innovative Computing, Information and Control, 2014, 10(5): 1791-1808.
[6] Wang X and Chen Q. Leading chaos to order for a nonlinear circuit system[C]. 2011 International Conference on, Electric Information and Control EngineeringChina, 1442-1445, 2011.
[7] Ni J K, Liu C X, Pang X, Fuzzy fast terminal sliding mode controller using an equivalent control for chaotic oscillation in power system[J]. Acta Phys. Sin.2013, 62(19):190507.
[8] T. Floquet, J. P. Barbot, and W. Perruquetti, Higher order sliding mode stabilization for a class of nonholomic perturbed system[J]. Automatica, 2013, 39(6): 1077–1083.
[9] Gao W and J. C. Hung, Variable structure control of nonlinear systems: A new approach[J]. IEEE Trans. Ind. Electron., 1993, 40(1): 45–55.
[10] 韩俊庆,吴爱国,董娜. 基于滑模干扰观测器的机械臂终端滑模控制[J]. 中南大学学报(自然科学版), 2020, 51(10): 2749-2757.
[11] Feng Y, Yu X H, and Man Z H, Non-singular adaptive terminal sliding mode control of rigid manipulators[J]. Automatica, 2002, 38(12): 2159– 2167.
[12] Aimeng Wang, Xingwang Jia, Shuhui Dong, A new exponential reaching law of sliding mode control to improve performance of permanent magnet synchronous motor[J]. IEEE Transactions on Magnetics, 2013, 49(5): 2409-2412.
[13] 王家斌, 于永进, 阎振坤, 等. 基于自适应非奇异终端滑模控制的电力系统混沌抑制[J]. 电力系统保护与控制, 2021, 49(7): 120-126.
[14] 杨洋, 于永进, 王云飞. 基于全局滑模时滞的电力系统混沌振荡控制[J]. 电力系统保护与控制, 2021, 49(15): 59-67.
[15] Lei Y, Xiao F, Shen Jianqing, et al. Sensorless control of high-power interior permanent magnet synchronous motor drives at very low speed[J]. IET Electric Power Applications, 2013, 7(3): 199- 206.
Sliding-mode controller with disturbance observer for chaotic oscillation in power system
Sun Jianlong, Liu Liya, Yang Xidang, Xiao Huan
(1. Wuhan New Energy Access Equipment & Technology Research Institute Co. Ltd, Wuhan 430205, China; 2.Beijing Bowanghuake Technology Co. Ltd, Beijing 100086, China; 3. National Key Laboratory of marine Integrated Power Technology, Naval Univ. of Engineering, Wuhan 430033, China)
TM46
A
1003-4862(2022)05-0001-05
2021-11-03
国家自然科学基金资助(51507188)
孙建龙(1987-),男,学士,从事电力电子技术及电气传动研究。E-mail:462892414@qq.com