重型商用车预见性自适应巡航控制策略研究*
2022-06-08李兴坤郑旭光王国晖王玉海
李兴坤,郑旭光,王国晖,王玉海
(1. 中寰卫星导航通信有限公司,北京 100094;2. 吉林大学,汽车仿真与控制国家重点实验室,长春 130000;3. 吉林大学青岛汽车研究院,青岛 266000)
前言
高级辅助驾驶系统(advanced driver assistance systems,ADAS)是发展较为成熟的技术之一。重型商用车主要承担长途运输任务,目前商用车定速巡航控制系统(constant cruise system,CCS)已广泛使用,而我国地形以山地、丘陵居多,起伏的道路势必导致车辆为保持车速带来转矩变化,造成燃油消耗的提高,燃油经济性变差。较高的燃油消耗量使物流运输成本提高,降低燃油消耗成为商用车领域主要研究方向之一。因此,研发高效、节能、安全、舒适的商用车巡航控制系统势在必行。
20 世纪40 年代,Ralph Teetor 发明了第一款“定速巡航”系统。20 世纪60 年代Diamind 提出了最早的自适应巡航系统雏形,通过控制主车与前车的车距,提高驾驶安全性,弥补了定速巡航安全性方面的不足。在政府的推动下,科研机构加大对自适应巡航的科研投入,自适应巡航控制系统有了突飞猛进的发展。文献[4]~文献[6]中考虑车间安全时距,设计了分层控制器实现了不同工况下车辆的自适应跟车控制。但是目前的自适应巡航系统只考虑了安全性与舒适性需求,没有考虑车辆燃油经济性。近年来,随着节能减排意识的提高,经济性巡航方式迅速发展。经济性驾驶技术的节油潜力可达15%以上,集成现有硬件、算法实现“人—车—路”之间的协同与实时优化,为巡航经济性提供了支持。王建强等搭建车辆油耗模型设计了基于前方道路的车辆节油控制系统,实现了车辆5%的节油效果。Zhuang 等设计了考虑道路坡度的分层能量控制系统,实现了电动汽车的安全跟车控制同时降低了电池能量损耗。董昊轩等采集实际道路信息,结合道路限速实现了距离域上全程优化问题的分段滚动优化。Ozatay 等利用云端求解最优速度控制序列,可以有效降低5%-15%油耗。Ye 等考虑周围环境其他车辆,基于数据驱动算法预测前车运动状态,优化主车车速降低燃油消耗。但是目前的巡航经济性设计考虑的因素过于单一,只完成了在仿真层面的优化设计,实际应用中可能无法适应真实道路环境,造成不可估计的危害。
为减少燃油消耗、降低驾驶员驾驶疲劳,利用车载ADAS 地图,基于前方道路坡度重构,结合道路限速,设计了预见性巡航控制系统(predictive cruise control system,PCC)并实现了批量测试。相比于定速巡航控制系统,该系统利用道路重力势能,实现了车路协同的变速巡航,降低了燃油消耗率。但是,在巡航过程中难免会遇到前车阻碍主车巡航情况的发生,主车非预期的减速制动行为会导致巡航中断,同时造成了非预期的燃油消耗。
本文针对预见性巡航控制系统的不足,提出了预见性自适应巡航控制系统(PACC),首先协同主车车速、前方道路坡度、前车位置和运动状态信息,减少了PCC 系统非预期制动行为。其次,提出了基于PCC 系统的巡航模式转换策略,对比传统自适应巡航,在充分利用重力势能情况下降低了燃油消耗。考虑了前方路网环境对跟车间距的影响,建立了基于前方路网环境及可变期望车间距的安全距离模型,建立了分层PACC控制策略,进行实车验证。
1 PACC系统概念
PACC系统实现了车辆纵向自动控制,实现了无危险环境下的预见性巡航及有碰撞风险下的预见性自适应巡航。预见性巡航算法结合前方道路环境规划车辆发动机转矩,降低燃油消耗。稳定的预见性巡航控制系统是保证PACC 系统稳定运行的关键,在周围环境无危险目标时控制车辆运行,是提高PACC 系统燃油经济性的关键算法。预见性自适应巡航算法保证车辆在受前车干扰时仍保持良好的巡航性能,提高系统稳定性和驾驶舒适性。
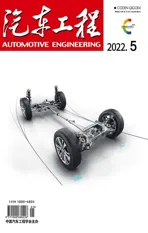
本文中设计了PACC 系统分层控制器,如图1所示。上层控制器通过感知周围环境信号及驾驶员驾驶意图实现了PACC 系统策略转换,求解主车期望加速度。下层控制器根据车辆纵向动力学控制理论和发动机MAP 图,计算发动机期望转矩,考虑主车传递效率、响应速度等情况下,使车辆能快速准确地响应发动机转矩,准确控制主车运动状态。
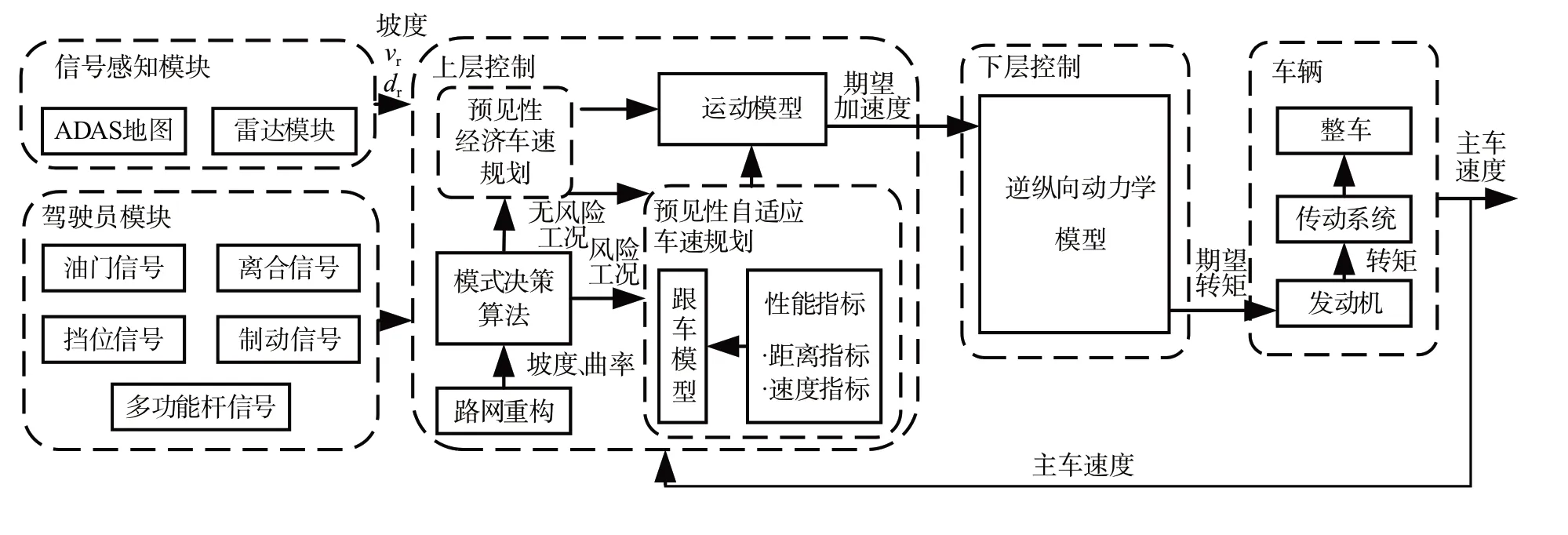
图1 PACC系统分层控制器
2 上层控制器
PACC系统上层控制器获取算法必要的参数,包括地图数据、雷达数据、驾驶员驾驶意图等,通过路网重构算法将道路分段减少迭代次数,减小系统计算压力。判断两车相对运动状态关系,选择合适的巡航模式,计算主车期望加速度,在保证安全车间距的基础上使主车以更经济、更舒适方式行驶。
2.1 基于车间距的模式切换策略
传统ACC 系统在跟车过程中以前方车辆运动状态为目标,跟随前车加速、减速,直到前方车辆驶离转换为传统定速巡航模式。在跟车过程中主车频繁的加速、减速行为势必会导致燃油消耗量的增加。在前车驶离过程中,主车会一直加速到设定车速,没有考虑前方地形对主车未来车速的影响,导致未来道路出现下坡主车车速过大,一方面造成不必要的加速行为,另一方面也会影响驾驶舒适性与安全性。本文基于可变车间距提出了PACC 系统模式切换策略,图2为PACC系统模式切换策略示意图。

图2 PACC系统模式切换策略
PACC 系统整个巡航过程分为预见性巡航模式和自适应巡航模式,自适应巡航过程中,车间距小于极限跟车距离时系统报警处理。系统依据两车相对距离在两种控制模式中切换。

式中:为两车制动停车时的极限最小距离;为巡航模式标志位,1 为预见性巡航模式,2 为跟车模式,3为报警模式。
当相对距离大于极限跟车距离或没有危险目标(设置相对距离为200 m)时,主车没有碰撞危险,以保证时效性与燃油经济性为主,系统进入预见性巡航模式。
当系统判断有碰撞风险的发生或两车车间距过小时,依据距离域分别进入跟车控制模式或报警模式。
2.2 预见性巡航经济车速规划
预见性巡航算法对前方2 km 道路坡度进行重构,并基于路网重构建立了滚动优化算法,在保证车辆和驾驶员安全的前提下,通过控制算法,模拟最优秀驾驶员的驾驶行为,根据路网重构后坡度信息,求解车辆前方道路上最优的转矩输出和挡位,控制发动机使其工作在燃油经济性最优转矩,对车辆车速进行调节,从而实现基于前方路网重构的最优控制。预见性巡航算法会在上坡之前计算出一个目标速度以及确定该段道路发动机转矩,使车辆在上坡之前进行加速,同时最大限度减少换挡次数。在接近下坡时预测前方道路的坡度及其节约燃油的潜力,如果预测的坡度过大车辆会先减速,车辆将会以带挡滑行方式进行行驶,这样避免了不必要的制动,提高了系统燃油经济性。图3 为PACC 系统路网重构算法示意图。

图3 PACC系统路网重构算法示意图
预见性巡航经济车速滚动优化过程如下:
步骤1,系统读取前方2 km 道路坡度,依据每段道路坡度将道路重新归类。

其中:++=
式中:为道路分类;为车辆上坡极限角;为车辆下坡极限角;S为分段道路距离;α为分段道路坡度;为分段道路集合。
步骤2,合并连续同类道路,重构该段道路坡度。

步骤3,设置转矩限制、速度限制等边界函数,保证系统稳定及车辆安全。

式中:(+)为车辆发动机在+段道路转矩;与分别为系统允许最小转矩与最大转矩;(+)为车辆在+段道路加速度;与分别为系统允许最小加速度与最大加速度;(+)为车辆在+段道路车速;与分别为系统允许最小速度与最大速度。
步骤4,依据重构后坡度,将车辆从段道路转移到1 段道路油耗作为最终目标,规划发动机最优转矩。

式中:为油耗函数;为分段油耗;(+)为第+段道路预见性经济车速,本文选用=2,求解最优速度序列()、(+1),依据重构后的道路类型,选择车辆的行驶方式,计算行驶转矩。
步骤5,车辆在段道路按计算转矩行驶。
步骤6,车辆转移到+1 段道路时,重新计算车辆发动机最优转矩。
预见性巡航经济车速为PACC 系统提供了无危险环境下的经济行驶车速,为动态跟车算法的开发提供了参考车速,为动态跟车算法节油方面提供理论支持。
2.3 跟车控制算法
车间距处于极限跟车距离与区间时,系统进入跟车控制,此时系统以保证安全性为主,同时考虑燃油经济性。自适应巡航核心为安全距离模型的确定,本文中提出了基于前方道路坡度的自适应车间距模型,基于该模型确定了两车相对运动关系模型,该运动关系模型表述了两车相对距离、相对速度及主车的运动状态,状态方式表达式如下:

式中:Δ为两车相对距离误差;为两车相对距离;为期望车间距;Δ为相对速度误差值;为两车相对速度;Δ为主车加速度偏差;为主车加速度;为主车期望加速度。系统的两车相对距离、相对速度由毫米波雷达直接获取,通过卡尔曼滤波算法减小噪声扰动。
当前车阻碍巡航工况时,PACC系统以自适应车间距跟车行驶,自动与前车保持一定的安全距离。安全距离模型极大程度上影响了巡航系统的舒适性、安全性和驾驶员可接受程度,合适的间距控制策略可以使系统平滑的进行模式切换。自适应车间距为以期望车间距为基础的可变化量,期望车间距与前车状态和前方坡度相关。当上坡时,前车减速会导致两车车间距变小,系统预见主车未来减速行为,期望车间距允许变小,主车可以避免碰撞风险同时积蓄较大的动能上坡;下坡时,期望车间距变大,主车可以提前降低转矩减小车速,防止下坡过程中发生超速等危险情况,避免不必要的制动行为,减少燃油消耗。期望车间距模型如下:

式中:为设定车间时距;为目标车车速;为制动停车时两车最小距离;为设定车间距偏移量;i为目标车位置道路坡度;、分别为上坡与下坡的坡度适应系数。
基于期望车间距设置了极限跟车距离与为

式中:与分别为极限跟车距离与的缓冲区间。
预见性自适应巡航控制算法考虑前方路型,并依据不同的路型划分情况规划主车在未来道路中的车速,保证驾驶安全,提高燃油经济性。本文以预见性巡航经济车速为基础,设计了考虑经济性与安全性的预见性自适应巡航车速,选用前车车速与预见性经济车速较小值作为预见性自适应巡航目标车速,防止主车跟随车前加速过大造成不必要的燃油消耗浪费,目标车速模型如下:

主车首先趋近于期望车间距,控制主车转矩保持两车相对距离及相对速度稳定。由于前车不可控性及毫米波雷达测量的数据存在测量噪声,两车相对速度不可能长时间保持为0,两车相对距离也不可能保持绝对的期望车间距,为减少系统波动,提高系统稳定性,当主车到达设定车间距后,与区间为跟车距离域,在该距离域内视为主车到达预期的自适应车间距。
3 下层控制器
PACC下层控制器输入量为期望加速度,输出量为发动机转矩,区别于传统巡航系统,为最大程度上保证驾驶员可以随时完全控制车辆,PACC系统不控制车辆节气门及制动装置,对发动机转矩进行直接控制,减少了中间传递装置,提高系统的响应速度与准度。
建立车辆纵向动力学模型,汽车纵向动力学行驶方程式为

式中:为驱动力;为行驶阻力之和;为汽车旋转质量换算系数;为汽车整车质量;为车辆速度;为时间。
驱动力可表示为

式中:为发动机转矩;为变速器传动比;为主减速器的传动比;为汽车传动系传动效率。
式中:为道路坡度;为重力加速度;为摩擦阻力系数;为空气阻力系数;为迎风面积;为主车车速;为摩擦阻力;为坡道阻力;为空气阻力。
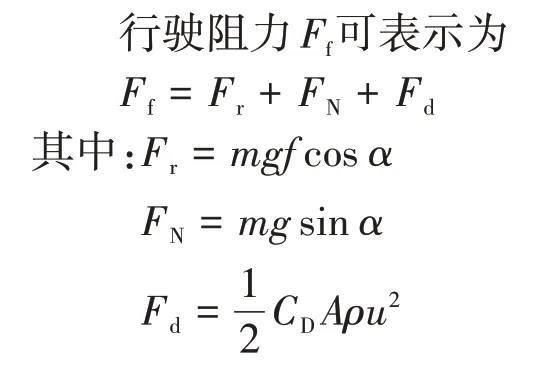
因此,车辆逆纵向动力学模型可表示为
下层控制器通过车辆逆纵向动力学模型计算车辆当前所需转矩,控制发动机按计算转矩运行,使系统按计算速度序列行驶,降低燃油消耗,保证车辆安全。
4 实车试验
4.1 试验车辆与装置
为验证PACC 系统的有效性,本文中建立一汽解放JH6 手动挡载货车实车试验平台,试验车辆如图4 所示,试验车辆基本参数见表1,试验道路为青岛某段高速公路,如图5 所示。基于系统性能要求及试验需求,安装预见性自适应巡航控制系统所需硬件,主要包括:车载VCU、T-BOX、整车线束、毫米波雷达等。试验时对车辆加载试验载质量块,使车辆达到满载状态。在不同工况下对该系统进行试验分析,分别对预见性巡航算法节油性、舒适性效果及预见性自适应巡航舒适性、安全性效果进行评价。

图4 PACC系统试验车辆JH6

图5 PACC系统实车试验道路
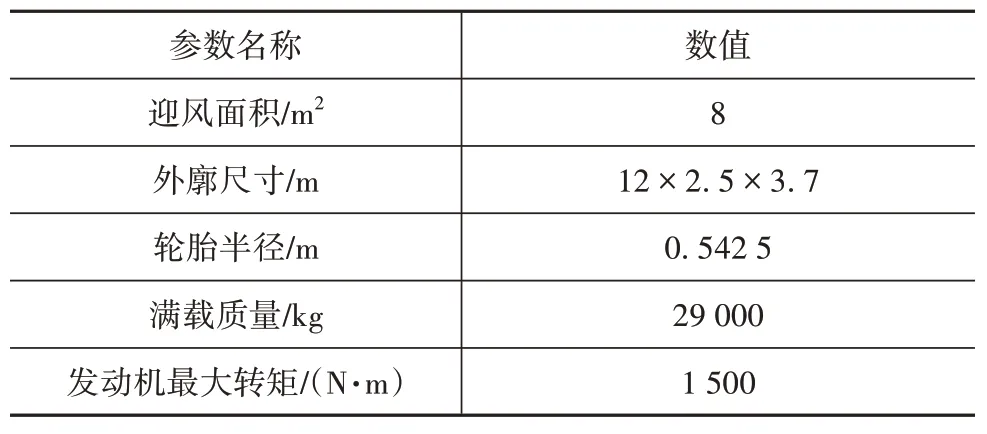
表1 JH6主要参数
4.2 试验结果
为验证该系统的节油效果,减少过多不可控变量对实验结果的影响,对无车环境下预见性巡航算法进行实车试验,巡航车速设定为75 km/h。
图6为PCC试验道路坡度与路网重构后坡度。

图6 PCC试验路网重构坡度
整个试验过程路网重构算法将道路实际坡度重新分段组合,将多段坡度不同路型整合为一段同等坡度路型,有效降低了前方道路分段数量,减少了预见性巡航算法的迭代次数,延长了预测距离,保证系统可以实时有效地迭代计算经济车速,保证系统的稳定运行。
图7为PCC试验控制效果曲线。

图7 PCC试验控制效果曲线
预见性巡航过程中,经济车速与实际车速依据道路坡度大小在设定车速附近波动,车辆在上坡之前提前加速积蓄能量,下坡之前避免加速行为,防止下坡过程中的超速及减速行为,避免非必要的能量损耗。上坡前车辆提前加速积蓄能量,冲坡过程车速降低,下坡前提前减速,依靠重力势能加速,使巡航车速趋近设定车速。整个加速减速过程充分利用动能与重力势能转换,减少了能量损耗。
该系统在预见性经济巡航过程中,发动机转矩为分段恒转矩,根据路网重构后的道路坡度预测车辆车速,计算发动机转矩,上坡路段前发动机提高转矩,车辆加速;到达下坡路段前,发动机提前降低转矩,控制车速在下坡过程中处在合理范围内,避免了车辆频繁的加速减速行为,降低燃油消耗,同时保证车辆行驶稳定性,提高车辆驾驶舒适性。
该试验过程车辆百公里油耗约为20 L,通过与大数据统计同道路熟练驾驶员燃油消耗量(约为22 L)对比,PCC 控车节油量约为8%。经大数据统计,预见性巡航经济车速算法在全国范围内已完成累积超过130 万km 的道路测试,与熟练驾驶员相比综合节油率可达到6%~8%。
为验证跟车过程中系统功能,设定较高的巡航车速90 km/h,选取某车速较低车辆做跟车控制实车试验。
图8 为PACC 实车试验控制效果曲线。区别于传统ACC 系统,由于该系统允许两车相对距离在一定范围内波动,两车相对车速与相对距离波动较大,但仍在安全范围之内。图9 为PACC 试验主车发动机转矩。

图8 PACC实车试验控制效果曲线
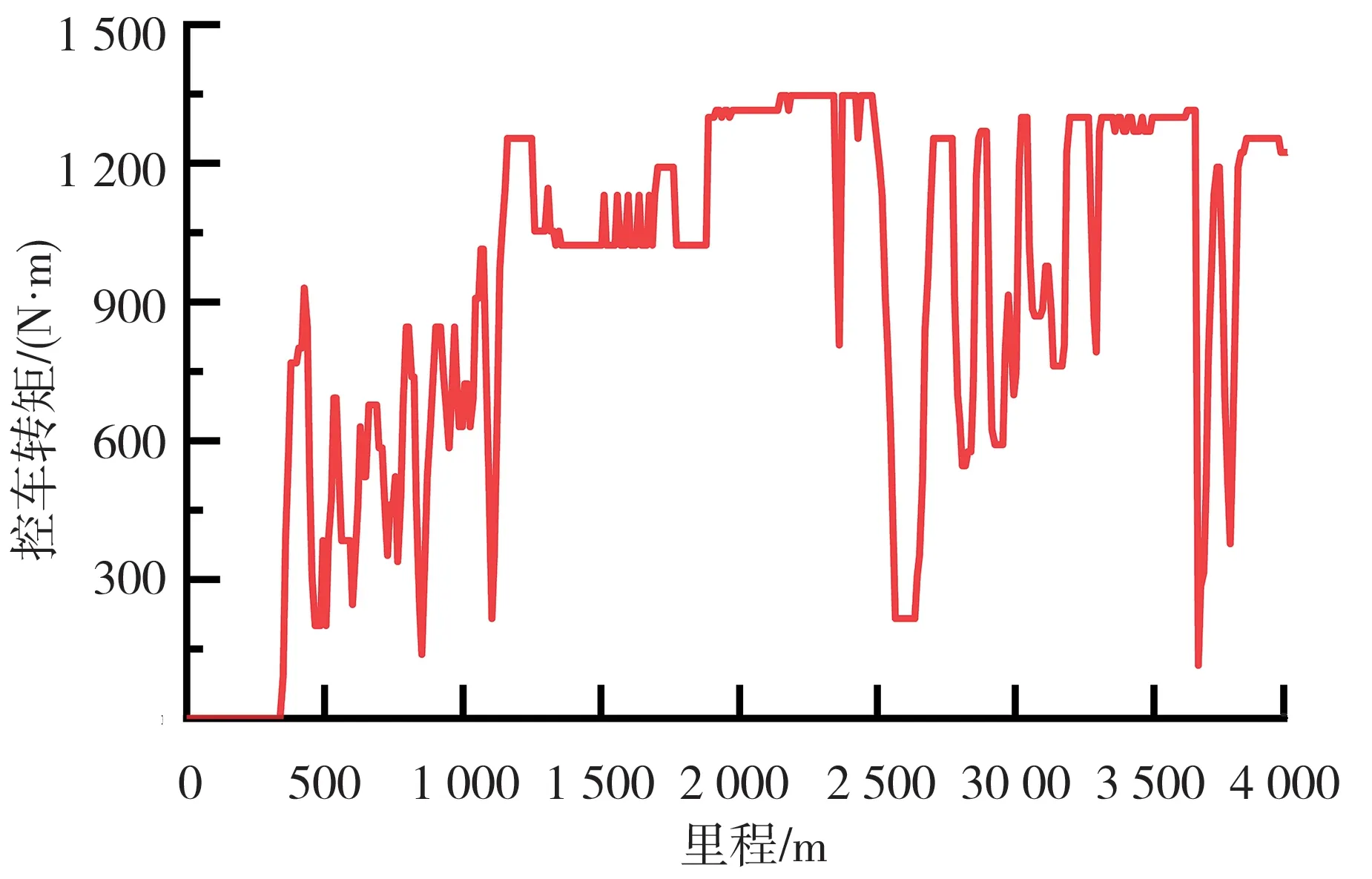
图9 PACC试验主车发动机转矩
由PACC 实车试验控制效果曲线与主车发动机转矩可以看出:
(1)0 处,前车车速小于主车车速且道路为下坡,两车相对车速较小,主车发动机转矩为0,主车车速降低,两车相对车速由-2 m/s 向0 趋近,相对距离趋近设定跟车距离;
(2)400 m 处主车车速趋近于前车车速,两车相对车速保持0 附近波动,相对距离由于车速波动在允许范围内缓慢增加;
(3)1 700 m 处两车相对距离超过最大跟车距离,前车为加速状态,车速持续增加,此时主车没有碰撞风险,主车以不超过前车车速的巡航车速行驶;
(4)2 300 m 处前车减速,系统判定主车存在碰撞风险,但该处为上坡路段且坡度减缓,前车未来存在可能的加速行为,且车辆需要保持较大的动力上坡,主车以较小的减速度减速,相对距离趋近车间距,到达安全车间距时前车仍为减速状态,主车降低转矩以较大的减速度减速,前车加速后,调整主车转矩以较小的减速度减速,直至两车车速相同。
预见性自适应巡航控制系统基于JH6 重型商用车试验平台,已完成超过1 万km 的实车道路测试。试验证明:主车巡航状态受前车运动状态及道路坡度影响,主车依据前车车速及道路坡度调整巡航车速,兼顾经济性与安全性,保证车辆及驾驶员安全,降低了燃油消耗。整段道路主车保持稳定巡航,控制两车相对距离在设定跟车距离附近波动,符合驾驶员心理接受程度,使车辆可以稳定跟车,同时有效避免了旁车汇入,提高巡航连续性。
5 结论
(1)针对高速路环境节能需求,设计了预见性自适应巡航控制系统,可以有效控制车辆的纵向自动驾驶,实车试验表明,设计的无危险环境下的预见性巡航经济车速算法可以控制车辆提前加速、减速行为,与熟练驾驶员相比综合节油率可达到6%~8%,有效的提高了商用车的燃油经济性;
(2)巡航过程中遇见潜在碰撞目标时,该系统可以控制车辆稳定跟车,通过可变期望车间距算法实现了主车的变速变矩跟车控制,有效保证了安全性的同时提高了驾驶舒适性;
(3)预见性自适应巡航控制系统已完成累积超过1 万km 的道路测试,该系统达到了预期的设计目标,实现了无危险环境下的经济驾驶及碰撞风险下的动态跟车,在各种工况下均能保持良好的稳定性与适应性。