跟踪微分器频率特性分析
2022-06-07牛宝良
牛宝良
(中国工程物理研究院总体工程研究所,四川 绵阳 621999)
数字微分计算是一种比较常用的运算,比如在速度计算、数字PID伺服控制中就要用到。简单的数字微分器是全频带的微分,在完成微分功能的同时,也会放大信号中的噪声,影响微分器的应用。韩京清等在1994年提出了跟踪微分器,具备了微分、降噪功能,但是此时的跟踪微分器还不完善,对于阶跃输入进入平稳期仍然有持续的震荡。韩京清等在1999年提出了跟踪微分器的离散形式,其实是一种改进版,彻底消除了震荡,这才具有了良好的工程应用性。此后,各种应用逐渐增多,也有多种不同的改进版本。文献[3]列举了4种版本,分别是开关型跟踪–微分器(STD)、快速型跟踪–微分器(FTD)、线性跟踪–微分器(LTD)、离散最速型跟踪–微分器(DFTD)。其中STD就是最早的版本,DFTD就1999年文献[2]提出的改进版。文献[4]提出了自适应TD。目前应用最多的还是DFTD,不特别说明的情况下,TD就是指DFTD。
TD的应用很多,涉及控制、信号处理等众多领域,也有一些关于TD频率特性的研究,这些文献揭示了TD的频率特性。比如无共振峰,高频段斜率是–40 dB/dec,转折频率附近相位滞后快速增加等,但是转折频率与TD的参数存在怎样的定量关系并未涉及。
在伺服控制系统中,通常用频率响应特性来描述系统的快慢。一个TD用于伺服控制系统,希望能准确知道它的频率范围,或者指定工作频带来设计一个TD,或者将一个TD用于信号分析与处理,也希望知道它适用处理什么频率范围的信号。本文将回答这些问题。
1 跟踪微分器方程
文献[2,6]都有较大篇幅介绍跟踪微分器,参数包括(速度因子),(滤波因子),积分步长。参考文献[6],本文给出公式如下(文献中的变量、、,用、代替,取==):

式中:为一个常数;为采样间隔,也是积分步长,s。

式中:、、、、、、是中间变量;()是输入信号;()是输入信号的跟随值,或者叫低频分量;()是()的微分,即速度;()是()的二次微分,即加速度;表示当前时刻,-1表示上一时刻。
把公式(2)用Simulink表达,如图1—3所示。其中in对应式(2)的(),acc对应式(2)的()。

图1 跟踪微分器的仿真模型Fig.1 Simulink model of TD

图2 acc Subsys模块Fig.2 Simulink model of acc Subsys

图3 w1 Sub模块Fig.3 Simulink model of w1 Sub
图1 与文献中的形式有所不同,实质未变,但是更容易分析其物理意义,而且通过仿真发现,这个形式在高频优于文献中的形式。首先,用代替以往文献中的、,取消,在这就是采样间隔。当系统的工作频率范围确定了,相应的采样间隔也就确定了,不用再与关联。其次,从图1可以看到,其实TD与单自由度系统的仿真模型形式上是相近的,参数实际是对计算的加速度进行饱和限幅,它具有加速度量纲。由于acc Subsys的输入是位移量纲,所以TD的与单自由度系统的弹簧刚度相当,因此有:

这样,就把与TD的工作上限频率联系起来了。
2 跟踪微分器频率特性分析
第1节建立了TD的参数与TD工作频率上限的关系,本节将通过仿真来验证这一关系。由于TD具有强的非线性特性,因此用时域仿真方法来验证。
2.1 仿真模型简介
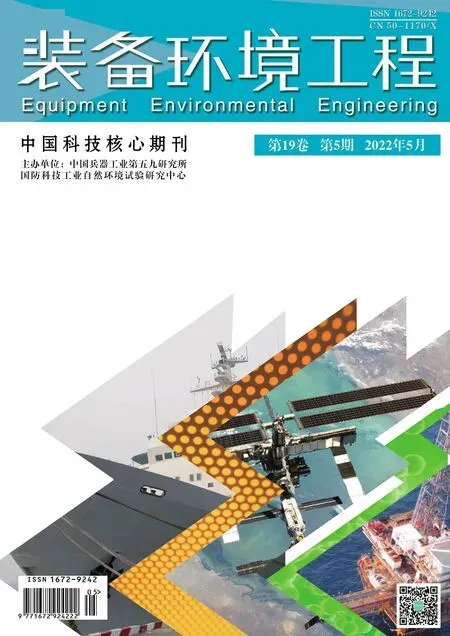
建立的仿真模型如图4所示。频率发生器、波形发生器用来产生扫频信号及其对应的微分信号。TD为跟踪滤波器,输出、、acc值3个信号。平滑滤波器作为对照,也输出3个信号。平滑滤波器是一个阻尼比为1的低通滤波器,其共振频率取TD的3(仿真发现3倍与TD效果接近)。波形发生器生成信号(方波、正弦),也生成相应的理想微分信号。理想微分信号用来观察TD微分、平滑滤波器的误差情况。
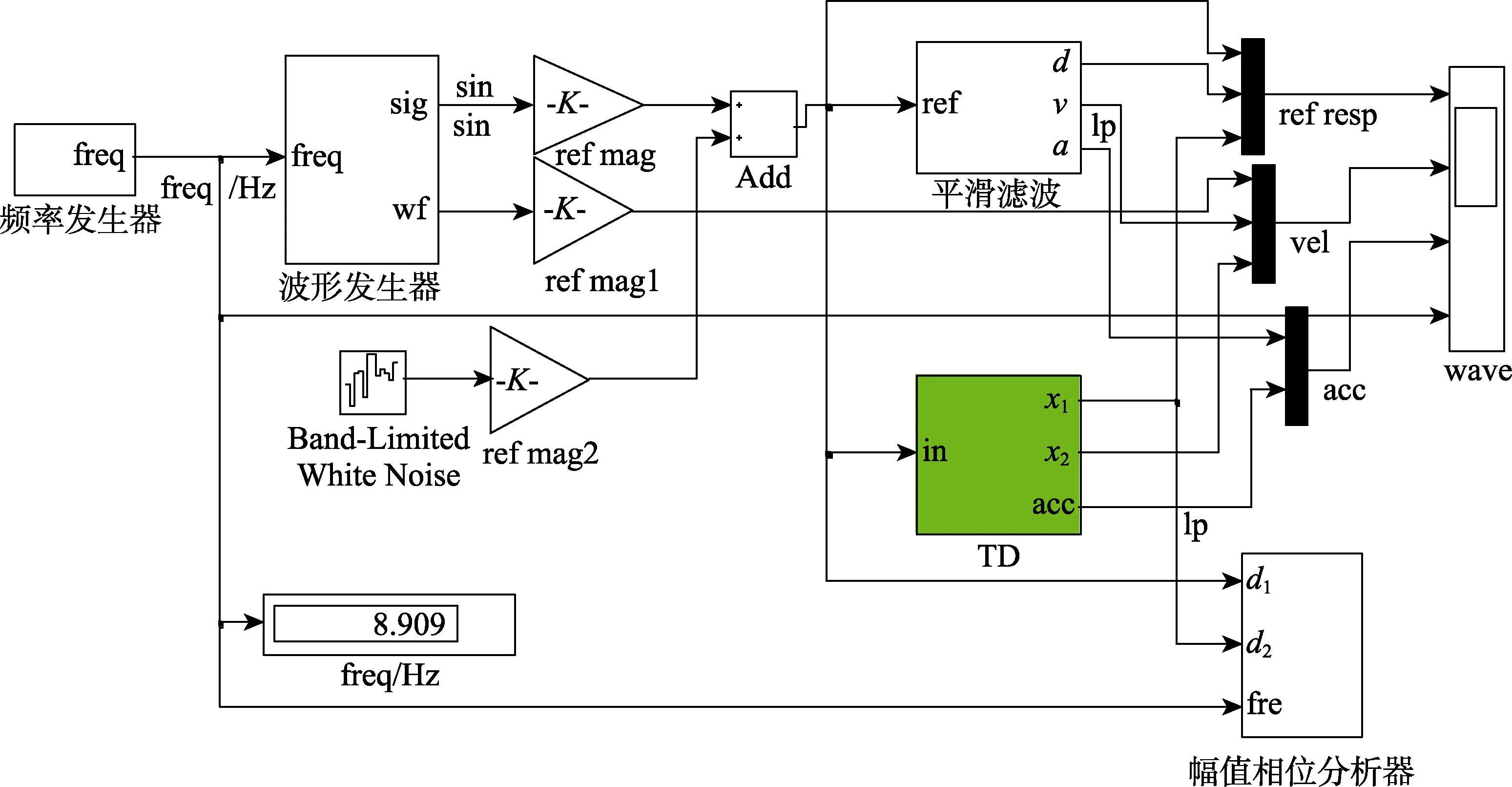
图4 扫频仿真模型Fig.4 Simulink model of sweep sin simulation
2.2 方波仿真
仿真采样间隔取50 μs。跟踪微分器的上限频率取10 Hz,=3 947.8。输入信号幅值为1,频率为4 Hz,仿真结果如图5所示。跟踪信号无超调达到目标值,TD得到的速度波形是规则的等腰三角形,即0速度起始,0速度结束,过程很平稳,它的加速度充分利用了限定的范围(-,)。在伺服控制器输入处,设置一个TD,它自动按限定的加速度范围给出最快过程曲线作为控制目标曲线。平滑滤波器也能在相近的时间无超调达到目标值,但是加速度已经超出范围。仿真表明,幅值为1、信号频率≤,都能很好地跟随。
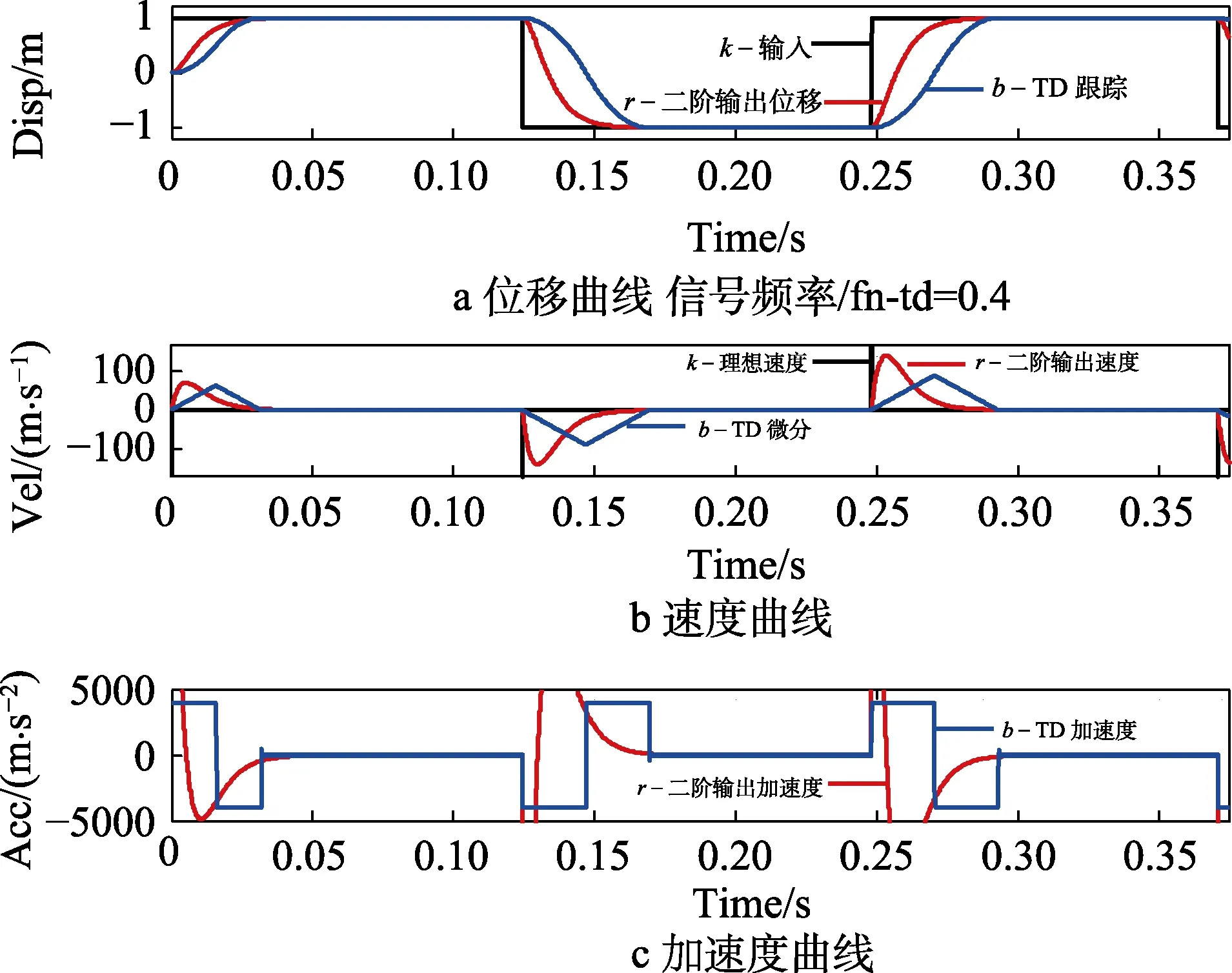
图5 TD方波仿真曲线Fig.5 Waves of square wave simulation on TD: a) displacement carve; b) velocity curge; c) acceleration curve
2.3 扫频仿真
TD参数取10 Hz,=3 947.8。输入信号幅值取0.1、0.25、1,频率取5~100 Hz,得到的频率特性曲线见图6,特征参数见表1。设置TD的频率上限为10 Hz,跟踪信号在10 Hz处幅值能保持1,跟踪信号与输入信号的相位滞后小于30°(10.37 Hz 滞后30°)。–30°~–90°是快速变化的,即设置10 Hz上限,TD就能工作到10 Hz。随着输入信号幅值的减小,幅频、相频的截止频率扩大了。0.25输入相比1输入时扩大了1倍,0.1输入相比1输入时扩大了3.16倍。从图6也可以看出,斜线是重合的,输入为1时的频率特性实际上是个包络,其他更小幅值的输入被限定到这个范围。当设置跟踪微分器的上限频率为其他值(不超过0.1 fs)时,所得的频率曲线也是与图6相似,即式(3)对于TD是普遍可用的。

图6 TD的频率特性(上限频率fn=10 Hz)Fig.6 Frequency characteristics of TD (fn=10 Hz): a) nonlinear frequency characteristics; b) phase frequency charactenistics
表1 不同输入幅值时的特征频率Tab.1 Characteristic frequencies of TD as different input magnitude Hz
信号频率等于TD上限频率时的时域曲线如图7所示。1 V输入时,TD跟踪信号与输入信号有明显可见的滞后,但是优于平滑滤波器(截止频率为3)输出;微分信号滞后也小于平滑滤波器微分输出,但是波形有失真,这是它相位上优于平滑滤波器微分输出的代价。在加速度波形上,两者的区别特别显著。0.1 V输入时,TD跟踪信号与输入信号重合,平滑滤波器输出则有明显滞后;TD的微分信号也是与理想微分信号也是重合的;在加速度波形上,TD的加速度在峰顶峰谷有毛刺和跳变,平滑滤波器输出则是规则正弦。这是TD相比平滑滤波器的优点,信号幅值减小时,频带扩大。

图7 信号频率等于TD上限频率fn时的时域曲线Fig.7 Time waves while sin wave signal frequency equal TD fn: a) input 1 V; b) input 0.1 V
2.4 含有噪声时仿真
实际信号中常常含有噪声。为此,加入一定的白噪声,来观察效果。图8a的信号频率比较低,为TD上限频率的1/2,TD跟踪幅值好,相比平滑滤波器输出占有优势。图8b信号频率达到TD上限频率,TD跟踪幅值较好,但是相位反而滞后平滑滤波器(无噪声时相位是优于平滑滤波器,可见噪声带来了不利影响)。从加速度曲线可以看到,正常情况下加速度直接到负最大或正最大,由于噪声影响,从负最大到正最大震荡一段时间才能保持在正最大。图8c的信号频率也TD上限频率的1/2,信号幅值减小到0.1,输入信号的信噪比很差,出现一个比较反常的现象,TD跟踪信号、TD微分信号上出现了一个震荡信号,震荡信号的幅值与有用信号相当,而平滑滤波器的跟踪信号、微分信号更好。
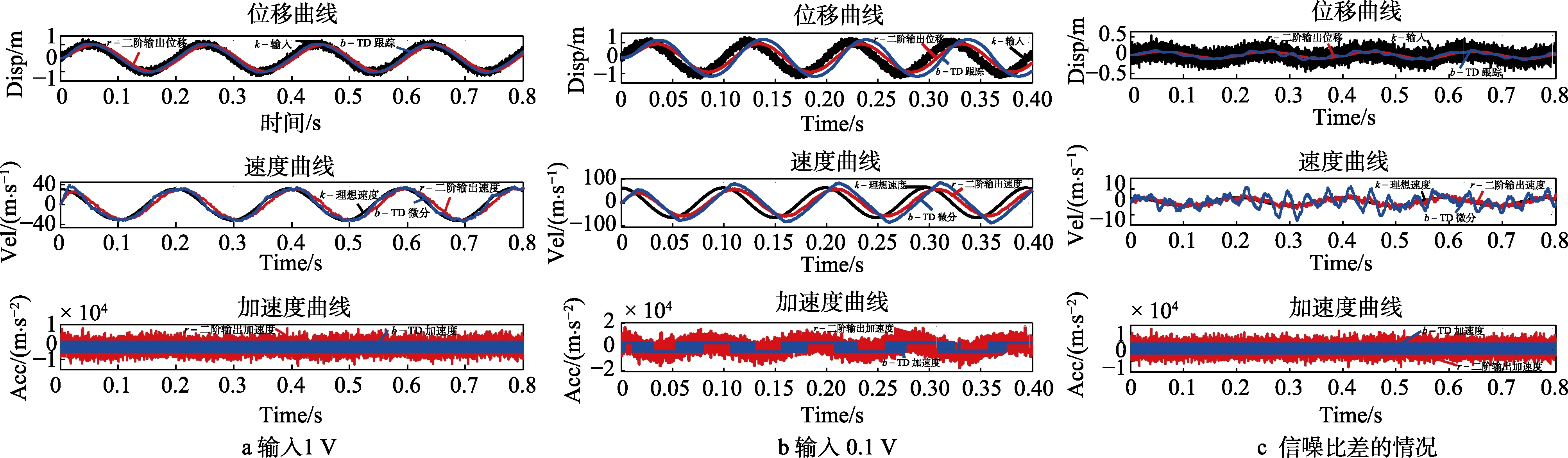
图8 有噪声信号频率等于TD上限频率fn时的时域曲线Fig.8 Time waves with noise while signal frequency equal TD fn: a) input 1 V; b) input 0.1 V; c) poor signal-to-noise ratio
3 跟踪微分器的应用
第2节已经分析得到,TD的上限频率与有关,同时还与输入幅值有关。对于输入为1的TD,上限频率与满足式(3)。在工程应用中,假设输入信号的范围是±,在TD的前后分别加一个比例环节,TD前的比例是1/,TD后的比例是。这样,既能满足输入信号范围,又能满足指定的频率范围。
关于的取值,其实与TD的关系不大,通常由伺服控制系统的上限频率决定。假设伺服控制系统的上限工作频率为,则数字伺服控制系统的采样频率、采样间隔由式(4)计算得到。

4 减小跟踪信号滞后的改进
TD生成的跟踪信号,总是存在一定的滞后,信号频率/TD上限频率越大,滞后越大。在仿真中发现,一个小小改进可以减小1拍的滞后。如图9所示,从积分器(integrator1)输出再接一个积分器(integrator3),积分方式选为后向欧拉法,用它来替代,比原可以提前1拍。仿真结果如图10所示,采样频率为100 Hz,TD截止频率为5 Hz,输入方波频率为1 Hz。
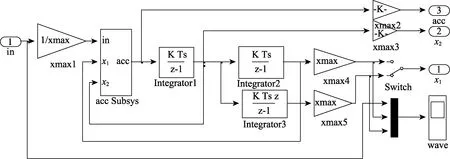
图9 改进后的TDFig.9 Improved TD

图10 改进后TD 的跟踪信号与原信号比较Fig.10 Compare wave of improved TD with wave of TD
5 结论
本文研究了TD的频率特性,提出了输入幅值为1时频率上限与TD参数之间的关系。通过时域仿真验证了该关系的正确性,解决了定量确定TD的参数问题。
TD的频率特性随输入信号幅值的改变而变化,幅值越小,频带越大,高幅值的幅频曲线包络低幅值的幅频曲线。对于输入幅值不是1时,宜进行归一化处理,在TD之后再恢复原量级,这样可以达到跟踪微分的目的,同时带宽刚刚好,因此滤波效果好,抑制噪声最佳。
信号频率小于TD的上限频率时,幅频、相频特性都比较好。输入幅值为1,信号频率等于0.62时,相位滞后不大于10°;信号频率等于时,相位滞后26°。相频曲线在1.1附近呈现快速变化的特征,1.15时滞后达90°。因此,建议信号频率在0~0.62为佳,最多取到0~。在微分信号后新增一个后向欧拉积分器,可以获得跟踪信号在相位上提前1拍的效果。多数情况下,TD的幅频、相频优于平滑滤波器,但是在信噪比很差时,平滑滤波器反而优于TD。
综上所述,明确积分步长与系统采样间隔相一致,建立参数与TD工作频率上限之间的关系后,将极大方便TD的设计,也将推动TD更多应用。