面向高轨航天器的北斗导航特性分析
2022-06-06周云,周亮
周 云,周 亮
面向高轨航天器的北斗导航特性分析
周 云1,周 亮2
(1 陆装驻石家庄地区第一军代室,石家庄 050081;2 中华通信系统有限责任公司河北分公司,石家庄 050081)
利用卫星导航信号实现高轨航天器的自主定轨与导航已成为当前国内外的研究热点,高轨星载导航接收机面临可见卫星数少、接收导航信号微弱、动态性较大等问题。针对以上问题,分析了高轨环境下星载导航接收机获取到的信号功率、可见星数、DOP值及多普勒频移状态。首先建立了北斗星座模型与高轨航天器动力学模型,构建星间测距链路,对高轨卫星的可见性进行了仿真分析,结果表明当星载接收机功率为-177 dBw时,可见星数能达到4颗以上,能满足定轨需求;然后对高轨卫星的定轨精度进行了仿真,DOP值的均值为15.657 8;最后对导航卫星和高轨卫星之间的多普勒频移进行了分析,仿真的多普勒范围为±14 kHz。相关研究结果可支撑高轨航天器星载接收机的开发。
高轨航天器;北斗卫星导航系统;DOP;可见星数;多普勒
0 引言
全球卫星导航系统(Global Navigation Satellite System,GNSS)具有全天候、全天时、高精度定位的特点,以越来越重要的角色服务于国家安全、经济社会等各行各业[1-2]。当前世界上稳健运行的GNSS包括美国的全球定位系统(Global Positioning System,GPS)、欧洲的伽利略(Galileo)、俄罗斯的格洛纳斯(GLONASS)和我国的北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)。BDS以其创新性的信号传播机制实现良好的全球覆盖能力,可全天候为各类用户提供定位、授时、测速和通信服务[3]。高轨航天器包含地球静止轨道(Geostationary Earth Orbits,GEO)卫星和大偏心率轨道(Highly Elliptical Orbit,HEO)卫星。近年来,高轨航天器因其覆盖面广、对同一区域连续工作等特点,在海洋通信、预警监视和天体探测等国防及民用领域发展迅猛。因此将卫星导航接收机用于高轨卫星定轨成为国内外研究的重要课题。
目前,卫星导航系统在中低轨道的研究较为成熟,而高轨卫星因其面临可见卫星数少、接收导航信号微弱、动态性较大等问题,造成弱信号难以捕捉和跟踪。2018年,柴嘉薪等模拟高轨航天器GNSS信号传播全链路,对接收导航信号强度和多星座联合导航方式进行重点研究[4];2020年,王猛等人对低轨航天器和高轨航天器进行了对比分析,对高轨空间环境进行了详细评估[5]。现有的研究对北斗导航信号的特性定量分析相对较少,面向高轨航天器的北斗导航信号特性分析值得深入研究。
本文在我国北斗全球卫星导航系统稳健运行背景下,面向高轨航天器的北斗导航信号特性进行研究。首先利用仿真平台建立北斗星座模型与高轨航天器动力学模型,研究高轨卫星的接收功率、定位精度和多普勒频移,然后进行仿真实验得到对应的参数指标。研究结果对北斗星载接收机的弱信号捕获与跟踪等提供进一步的理论与数据支撑。
1 仿真平台建立
首先建立北斗星座模型以及高轨卫星模型,依据GNSS信号时空分布在两者之间建立通信链路,并对电波传播链路进行了描述。
1.1 北斗星座模型
北斗星座模型包括北斗区域导航系统星座和北斗全球导航系统星座,利用卫星工具包(Satellite Tool Kit,STK)对北斗星座进行仿真建模。
1)北斗区域导航系统星座包括14颗组网卫星,其中5颗GEO卫星、5颗倾斜地球同步轨道(Inclined Geo Synchronous Orbit,IGSO)卫星和4颗中地球轨道(Middle Earth Orbit,MEO)卫星[6]。其中,GEO卫星分布在东经58.75°、80°、110.5°、140°和160°的位置上;IGSO卫星定点于三个卫星轨道平面上,平面倾角55°,升交点赤经间隔120°,5颗星中有3颗星下点轨迹相同,交叉点经度东经118°,另外2颗星下点轨迹相同,交叉点经度东经95°;MEO卫星相位分布符合星座构型Walker 24/3/1,轨道高度为21 528 km,倾角为55°,回归周期为7天13圈,第一轨道面升交点赤经为0°,4颗星分别位于第一轨道面7、8相位和第二轨道面3、4相位[7-8]。北斗区域导航系统的卫星轨道和星下点轨迹分别如图1和图2所示。
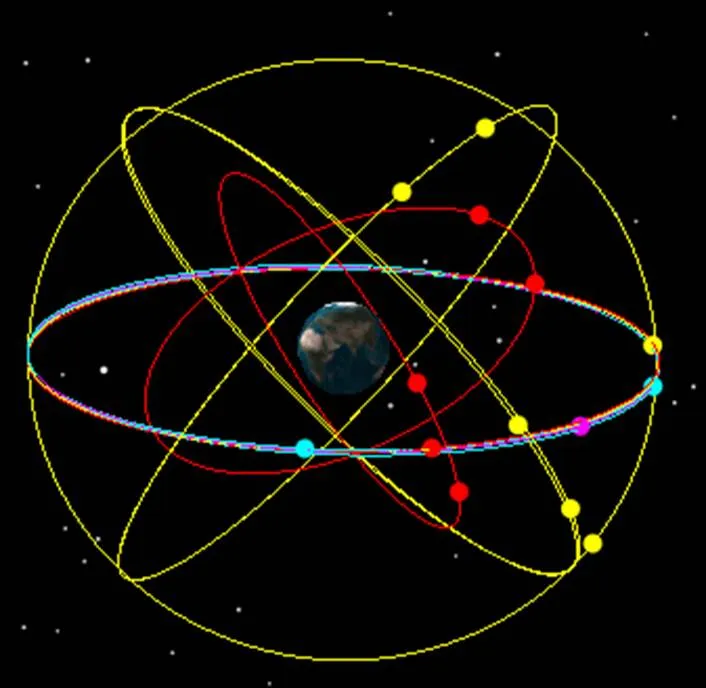
图1 北斗区域系统三维卫星轨道

图2 北斗区域系统卫星星下点轨迹
2)北斗全球导航系统星座包括30颗组网卫星(3颗GEO卫星、3颗IGSO卫星和24颗MEO卫星)。其中,GEO卫星分布在东经80°、110.5°和140°的位置上;IGSO卫星定点于三个卫星轨道平面上,轨道平面倾角55°,升交点赤经间隔120°,卫星的星下点轨迹相同,交点地理经度为东经118°;MEO卫星分布符合星座构型Walker 24/3/1,轨道高度21 528 km,倾角为55°,回归周期为7天13圈[9]。北斗全球导航系统的卫星轨道和星下点轨迹如图3和图4所示。

图3 北斗全球系统三维卫星轨道
1.2 高轨用户卫星
2000年,美国国家航空航天局通过星载GPS接收机对高轨卫星自主导航研究时,使用HEO卫星AMSAT OSCAR-40(AO-40)进行实验[9-10]。该试验基于GPS系统,得到关于高轨航天器的导航信号功率、可见星数、精度因子(Dilution of Position,DOP)值及多普勒频移状态。本文基于STK软件选用AO-40作为用户星建立了系统的仿真平台,高轨用户卫星模型构造基于成熟的卫星数据,具有科学性、真实性。AO-40具体轨道参数如表1所示。

表1 AO-40卫星轨道参数
1.3 导航信号传输链路
模拟导航信号发射、空间信号传播到信号接收这个完整过程,需要建立北斗星座模型和高轨卫星模型之间的导航信号传输链路。基于此传输链路使用空间链路预算公式求得导航卫星信号的接收功率,空间链路功率预算公式为:

导航卫星的发射天线指向地心,本文仿真北斗导航系统使用与GPS卫星信号主瓣宽度相同大 小[11]。导航卫星发射机和GEO卫星接收机详细参数如表2所示。
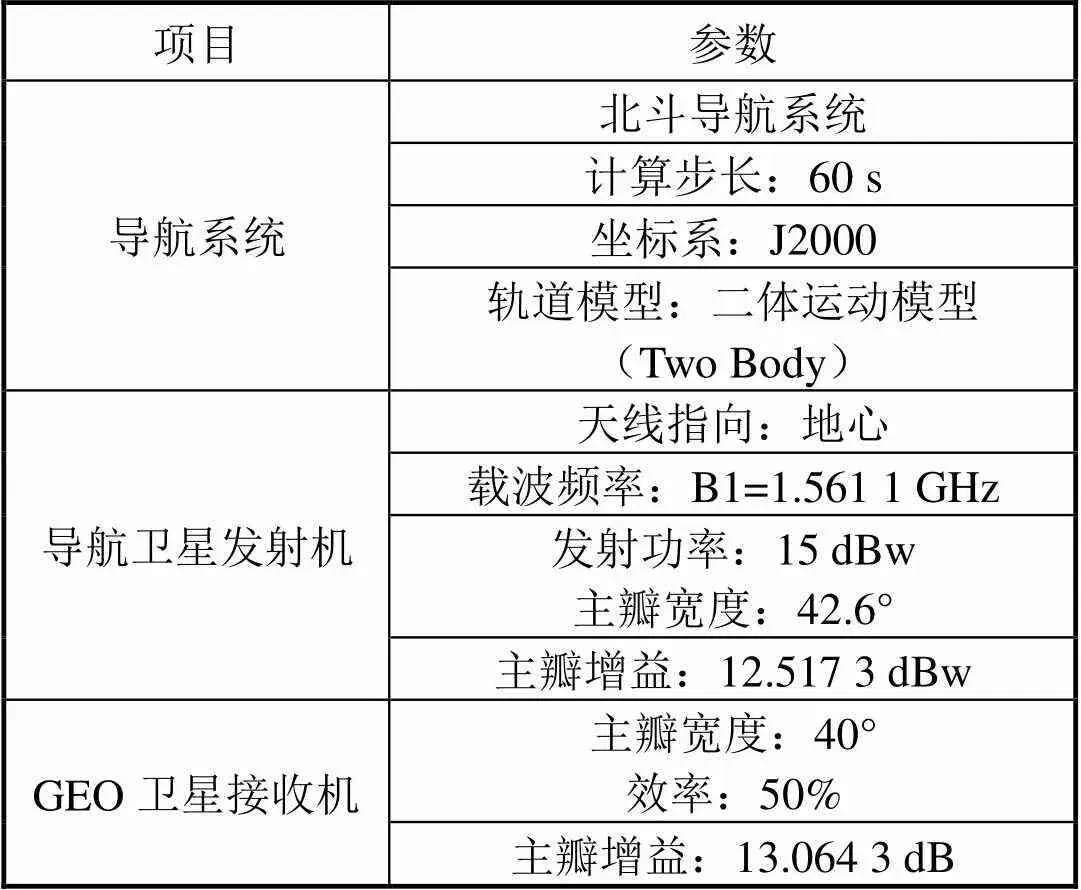
表2 STK参数设置
2 空间信号特性分析
本节从高轨接收机的可见星数、、多普勒频移三个方面入手,通过仿真数据对信号捕获阶段进行分析,有助于接下来对卫星导航信号的捕获跟踪以及定轨的研究。
2.1 可见性分析
采用STK软件进行可见性分析。将北斗卫星加入到星座,建立北斗卫星星座与高轨卫星之间的链路,对链路访问过程进行分析。不考虑接收机灵敏度指标情况下,计算出24 h内高轨卫星对北斗卫星的可见星数,从而判断卫星轨道运行过程中可见星数是否能达到4颗来满足定轨需求。仿真流程图如图5所示。

图5 可见性分析流程图
高轨卫星和北斗导航卫星的三维链路仿真场景图如图6所示,图中可以看到导航卫星和高轨卫星的在轨运行状态,绿色连线代表传播链路,表明此时导航卫星对高轨航天器可见,当存在遮挡时连线消失。三维链路仿真场景可以直观形象地体现高轨航天器对北斗卫星的可见性。
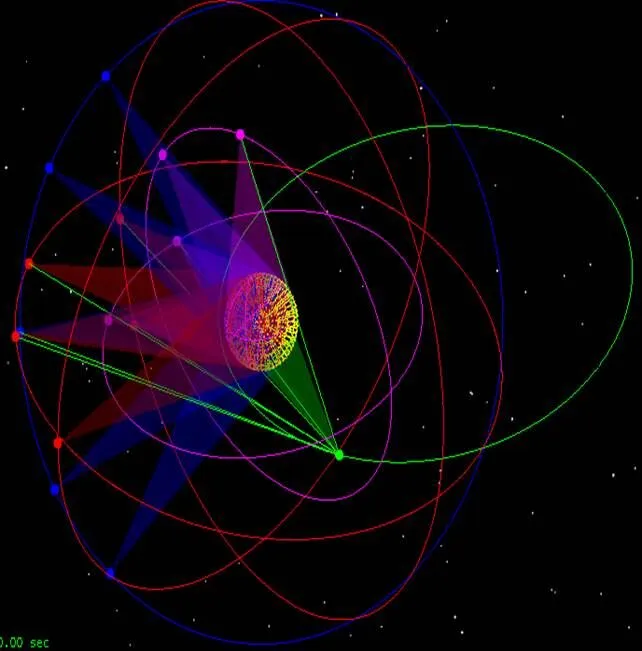
图6 三维链路仿真场景
2.1.1 轨道高度对可见星数的影响
分析轨道高度对卫星的可见星数的影响,仿真条件:北斗全球;轨道偏心率=0;轨道倾角=0;轨道高度分别取3 000 km(低轨道)、40 000 km(高轨道),仿真时间为24 h,仿真步长60 s计算一次可见性,仿真结果如图7和图8所示。
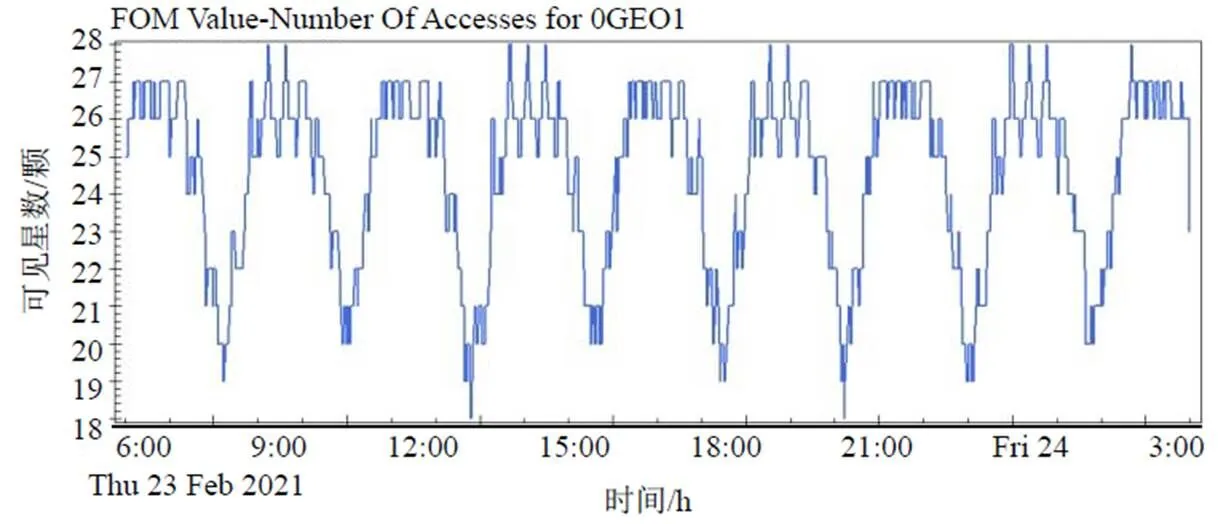
图7 轨道高度为3 000 km时的可见星数

图8 轨道高度为40 000 km时的可见星数
由图7和图8可知,卫星在低轨道时星载接收机接收到的导航卫星的数目比较多,在航天器的整个运行期间,可见星数都多于4颗,全程能实现定轨。随着轨道高度的增加,卫星的可见性将逐渐变差,原因是星载接收机受到地球遮挡造成导航卫星信号部分丢失。

图9 HEO高轨航天器对北斗卫星可见星数
HEO高轨卫星对北斗卫星的可见星数如图9所示,当HEO高轨卫星运行到近地点时,卫星的可见星数能达到4颗,能满足定轨需求。HEO在远地点的运行速度比较慢,所以在大部分时间内,可见星数少于4颗,无法进行高轨定轨。
2.1.2 接收功率对可见星数的影响
在一定单位内提高接收灵敏度能提高卫星的可见星数,为了方便进行灵敏度指标确定,仿真了不同接收功率下AO-40远地点最少可见星数占全部弧度的百分比。

表3 不同接收功率条件下,AO-40远地点可见星数弧段占全弧段的百分比

2.2 几何精度因子
卫星导航星座能够通过体现卫星空间几何分布对定位精度的作用。它显示了用户—卫星几何分布的关系,值随着几何分布的优化会逐渐变小。精度衰减因子主要包含以下几种:几何精度因子(Geometric Dilution Precision,GDOP)、空间位置精度因子(Position Dilution of Precision,PDOP)、水平位置精度因子(Horzontal Dilution of Precision,HDOP)、高程精度因子(Vertical Dilution of Precision,VDOP)和钟差几何精度因子(Time Dilution of Precision,TDOP)[12]。

接收机到发射机的单位矢量坐标表达为式(3):

为:

为:

为:
为:
是表示卫星几何分布的参数,值越大定位精度越低。通过STK来模拟导航星座的定位精度,设定参数如下:北斗全球系统接收功率为-177 dBw;仿真时长为24 h;采样间隔为300 s。仿真HEO轨道对北斗星座的定位精度结果如图10和图11所示。

图10 HEO轨道的DOP值变化曲线

图11 HEO定位DOP概率密度分布

表4 HEO定位DOP
HEO星载接收机采用的接收机灵敏度是-177 dBw,对的概率密度函数和最大最小值进行仿真分析,当在大偏心率轨道运行过程中位于近地点时可见星数量增多,因此定位精度较高。制约定位精度的原因有卫星可见星数少、可见信号弱等。
2.3 多普勒频移

基于Matlab仿真平台使用STK Connect模块,首先调用数据模块中的目标参数对STK基本模块进行轨道、姿态、飞行、时间等仿真控制;然后STK模块进行仿真程序整体协调,得到控制模块标准数据构造的数据包的同时,接收控制台的标准数据包构造实现模块想要的标准数据文件,传输给实现模块;最后达到对STK仿真场景的总体设计与控制的目的,以及多普勒频移的计算。与STK Connect连接流程图如图12所示。

图12 STK与STK Connect连接流程图
由图13可知,HEO星载接收机接收到BDS1频点卫星的多普勒频移的最大值为14 kHz,最小多普勒偏移值为-14 kHz,其动态性比较高。多普勒频移是影响星载接收机捕获和跟踪速度的关键因素。
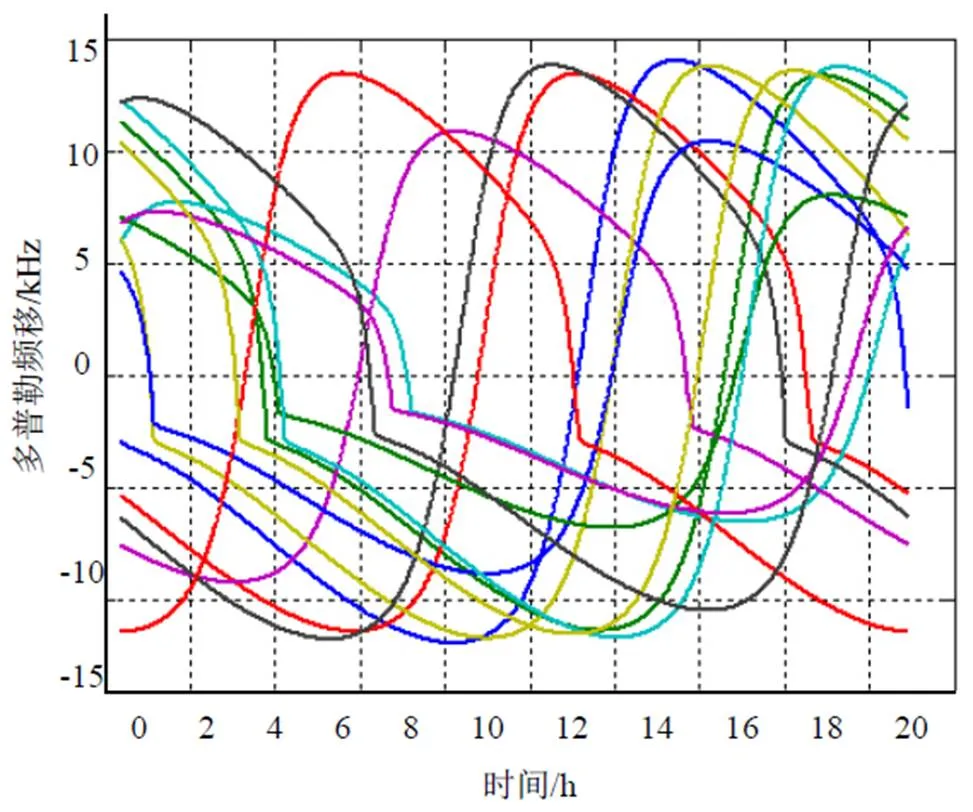
图13 HEO接收BDS B1信号多普勒特性曲线
3 结论
本文针对高轨环境下的空间信号特性完成了以下工作:
1)建立了北斗星座和高轨卫星模型,并对信号传输链路进行建模;
2)对高轨卫星和北斗星座的可见性进行了分析,最终确定了当接收机灵敏度为-177 dBw时能满足全程可见星数可达到4颗以上,达到定轨要求;
3)对于HEO轨道的值进行了仿真,当大椭圆轨道在运行过程中位于近地点时可见星数量增加会有很少的一段时间定位精度比较高。定位精度比较差是由于高轨卫星可见星数量少、可见信号弱等因素;
4)对高轨卫星和导航卫星两者之间的多普勒频移进行了研究,仿真结果表明HEO接收1频点的多普勒频谱动态范围在±14 kHz。
本研究从高轨航天器的北斗导航信号特性出发,通过真实卫星数据仿真来探索北斗卫星导航系统的弱信号捕获、跟踪和定轨技术,相关研究结果可支撑高轨航天器星载接收机的开发,具有重要的研究意义和实践价值。
[1] 纪龙蛰,单庆晓. GNSS全球卫星导航系统发展概况及最新进展[J]. 全球定位系统,2012,37(5):56-61.
[2] 王凤娇. 基于高轨星载接收机的BDS/GPS弱信号捕获技术研究[D]. 武汉:武汉理工大学,2014.
[3] 窦爽. 北斗信号的捕获跟踪算法研究[D]. 西安:西安电子科技大学,2014.
[4] 柴嘉薪,王新龙,俞能杰,等. 高轨航天器GNSS信号传播链路建模与强度分析[J]. 北京航空航天大学学报,2018,44(7):1496-1503.
[5] 王猛,单涛,王盾. 高轨航天器GNSS技术发展[J]. 测绘学报,2020,49(9):1158-1167.
[6] 郑彤. 北斗区域和GPS组合系统国内典型地区定位性能分析[J]. 舰船电子工程,2019,39(8):60-63.
[7] 张恺. 北斗二代卫星导航信号模拟器仿真研究[D]. 西安:西安理工大学,2014.
[8] H. Ballard. Rosette Constellation of Earth Satellite[J]. IEEE Transactions of Aerospace and Electrical System, 1980, 16(5): 56-673.
[9] 姜慧,王亚芳,王垚,等. 基于北斗导航信号的高轨卫星定位性能分析[J]. 信息通信,2017(9):71-74.
[10] Michael C Moreau, Edward P Davis, J Russel Capenter, et al. Preliminary Result from the GPS Flight Experiment[C]. HEO Orbit 25th Annual AAS Guidance and Control Conference, 2002: 6-10.
[11] 韩帅,邓雪菲,王学东,等. 基于GNSS组合导航系统的高轨卫星定位研究[C]//第八届中国卫星导航学术年会论文集——S01卫星导航应用技术,2017:148-153.
[12] 杜娟. 星基增强系统互操作及其关键技术研究[D]. 西安:中国科学院研究生院(国家授时中心),2015.
[13] 樊敏. 基于GNSS的月球探测器导航技术研究[D]. 北京:中国科学院大学,2017.
[14] 谢燕军. 高轨航天器中GPS弱信号处理及自主定轨技术[D]. 哈尔滨:哈尔滨工程大学,2011.
Characteristics Analysis of Beidou Navigation Signal Based on High Orbit Spacecraft
ZHOU Yun, ZHOU Liang
With the development of satellite navigation technology and the maturity of satellite navigation receiver, the application of satellite navigation receiver to autonomous navigation of high orbit spacecraft has gradually become the focus of research at home and abroad. The high orbit satellite borne navigation receivers are confronted with such problems as less visible satellites, weak navigation signals and larger dynamic characteristics. In view of the above problems, the navigation signal power, visible star number, DOP value and Doppler frequency shift received by satellite borne navigation receivers in high orbit environment are analyzed. First, the Big Dipper model is established according to the ephemeris, dynamics model construction of high orbit spacecraft, build inter satellite communication link, visibility of high orbit satellite are simulated and analyzed, the results show that when the satellite receiver power is -177 dBw, the number of visible satellites can reach more than four, can meet the demand of the orbit; then high orbit satellite orbit accuracy simulation, the orbit accuracy than the ground precision high orbit satellite receiver, this is due to the high orbit visible stars attract less; finally between navigation satellite and high orbit satellite Doppler simulation, Doppler simulation range is ±14 kHz. The research provides the theoretical basis and data support for the following weak signal acquisition and tracking.
High Orbit Spacecraft; Beidou Navigation System; DOP; Number of Visible Satellites; Doppler
V411.8
A
1674-7976-(2022)-02-085-07
2022-02-18。周云(1987.04—),河北晋州人,硕士研究生,工程师,主要研究方向为卫星导航信号处理。