利用Sentinel‐1/2融合影像分析城市内涝
2022-06-05郭欣怡赵双明
郭欣怡 赵双明
1 武汉大学遥感信息工程学院,湖北武汉,430079
城市内涝是北京市洪涝灾害的主要类型,是全球变暖引发的高频的极端气候,不断推进的城市化进程带来的不透水面持续增加,排水格局发生变化[1]等共同作用的结果。中国许多大中城市频繁遭受城市内涝灾害[2],使用遥感影像监测暴雨短期积水情况,并将其作为治理城市内涝灾害的基础信息来源之一,对及时规避人员和财产损失,推进中国城市化平稳发展有重要意义。
主动式遥感可以全天时全天候地获取与表面粗糙度及相对几何属性等信息相关的地物后向反射率。而光学遥感基于光谱特征识别物体,易受云层影响,并且重访周期小的传感器空间分辨率相对较低[3]。Twele等[4]提出基于Sentinel⁃1影像的自动处理链,使得在提供数据集后的45 min内可获得关键灾难信息;汤玲英等[5]使用Sentinel⁃1数据基于面向对象分类法监测洪水,减弱了云层干扰,但缺少光学影像的验证分析,精度有待提升;Chang等[6]使用Sentinel⁃1/2影像绘制地中海灌丛生物量的研究说明使用光学和雷达融合影像分类的准确度比单传感器影像分类准确度高。
面向对象分类指实现对象水平的地物分类,可减弱“椒盐效应”及削弱基于像元分类难以避免的“同物异谱”及“同谱异物”现象[7]。该方法可以有效改善高分辨率雷达图像识别城市内部洪水的能力[8],减弱城市内部常出现的二面角反射效应。张丽文等[9]以提取武汉市汛期不同水体类型为例,指出面向对象分类较归一化水指数阈值法精度高。本文通过比较晴雨影像的面向对象分类结果,得到暴雨造成的水体分布,并结合北京市城区图分析潜在内涝灾害风险。
1 短期积水研究区域和数据
研究区域为北京市主城区,其路网复杂,人口稠密,城市化发展迅速,且北京市近年来暴雨频发。本文数据为北京市2017年8月12日暴雨期间的Sentinel⁃1A数据、2017年3月9日晴朗天气下的Sentinel⁃1A和Sentinel⁃2A数据。
Sentinel⁃1由A、B两颗卫星的星座组成,均搭载一个基于C波段的雷达成像系统,重访时间为6天。本文选取干涉宽幅模式的地距探测(interferometric wide swath ground range detected,IW GRD)产品为研究数据,空间分辨率为5 m×20 m,极化方式为VV+VH。Sentinel⁃2为多光谱卫星,同样由A、B两颗卫星组成星座,重访时间为5天,可提供分辨率为10 m、20 m、60 m的13个波段。本文使用的Level⁃1C数据是经过几何精校正的正射影像,可提供大气顶层的反射状况。
2 雷达及光学影像水体提取
图1为研究工作流程。首先,对雷达影像与光学遥感影像进行预处理,再结合北京市主城区矢量图完成影像裁剪;然后,将晴天的光学影像与雷达影像融合,对融合影像和暴雨期间获取的雷达影像基于面向对象分类法进行分类;最后,利用积水点数据以混淆矩阵的方法检验精度,并用可视化的方式展示结果。
1)影像预处理。使用Sentinel数据应用平台(Sentinel application platform,SNAP)开源软件预处理Sentinel⁃1影像,依次实现应用精确轨道、热噪音去除、辐射定标、斑点滤波、距离多普勒算法地形矫正等步骤,如图1所示。而Sentinel⁃2光学遥感影像预处理由欧洲航天局(European Space Agency,ESA)发布的Sen2Cor插件实现,包括大气校正等操作。

图1 技术流程图Fig.1 Technical Flow Chart
2)影像融合。Sentinel⁃1影像的空间分辨率较高,且雷达回波强度受到雷达参数(极化方式、波长、斜倾角)及地物表面粗糙度影响,反映地物纹理特征更客观,但缺乏光谱信息。而具有丰富光谱信息的Sentinel⁃2影像空间分辨率相对较低。因此,将Sen⁃tinel⁃1影像中利于提取水体的VV极化波段[10]与Sentinel⁃2光学遥感影像通过最近邻扩散泛锐化(nearest neighbor diffusion pan sharpening,NNDif⁃fuse pan sharpening)算法实现融合,提高空间分辨率的同时丰富光谱信息。NNDiffuse pan sharpening算法假设全色波段中的每个像素由它的相邻超像素在光谱波段的加权线性混合而成,在融合影像品质及处理速度等方面具有更突出的优势[11]。
3)面向对象分类。面向对象分类是指先分割影像,再结合光谱、空间及纹理等特征完成监督分类的方法,可提升高分辨率影像的分类精度。本文使用的软件为eCognition[7]。分割是分类的基础,多尺度分割是一种局部优化自下而上的分割方法,尺度、形状、平滑度等分割参数通过多次尝试确定。监督分类使用的特征不局限于光谱特征,还有各波段反射率均值、标准差等基本统计特征,以及形状特征、纹理特征等。监督分类基于分类与回归树(classification and regression tree,CART)算法[12]完成,采用基尼系数最小化准则来进行特征选择,根据特征阈值将当前样本不断划分为两个子样本,直到每一地物都被识别出来,最后生成的决策树是结构简洁的二叉树[13]。
3 面向对象分类结果与评价
图2为用于提取既有水域的基础影像。图3为用于提取暴雨期间水体范围的Sentinel⁃1雷达遥感影像。水体表面较为光滑,可近似看作镜面,后向散射强度弱,因此在图2(a)和图3中以黑色呈现,与其他地物极化特征差别大,可以被快速简单地识别出来。
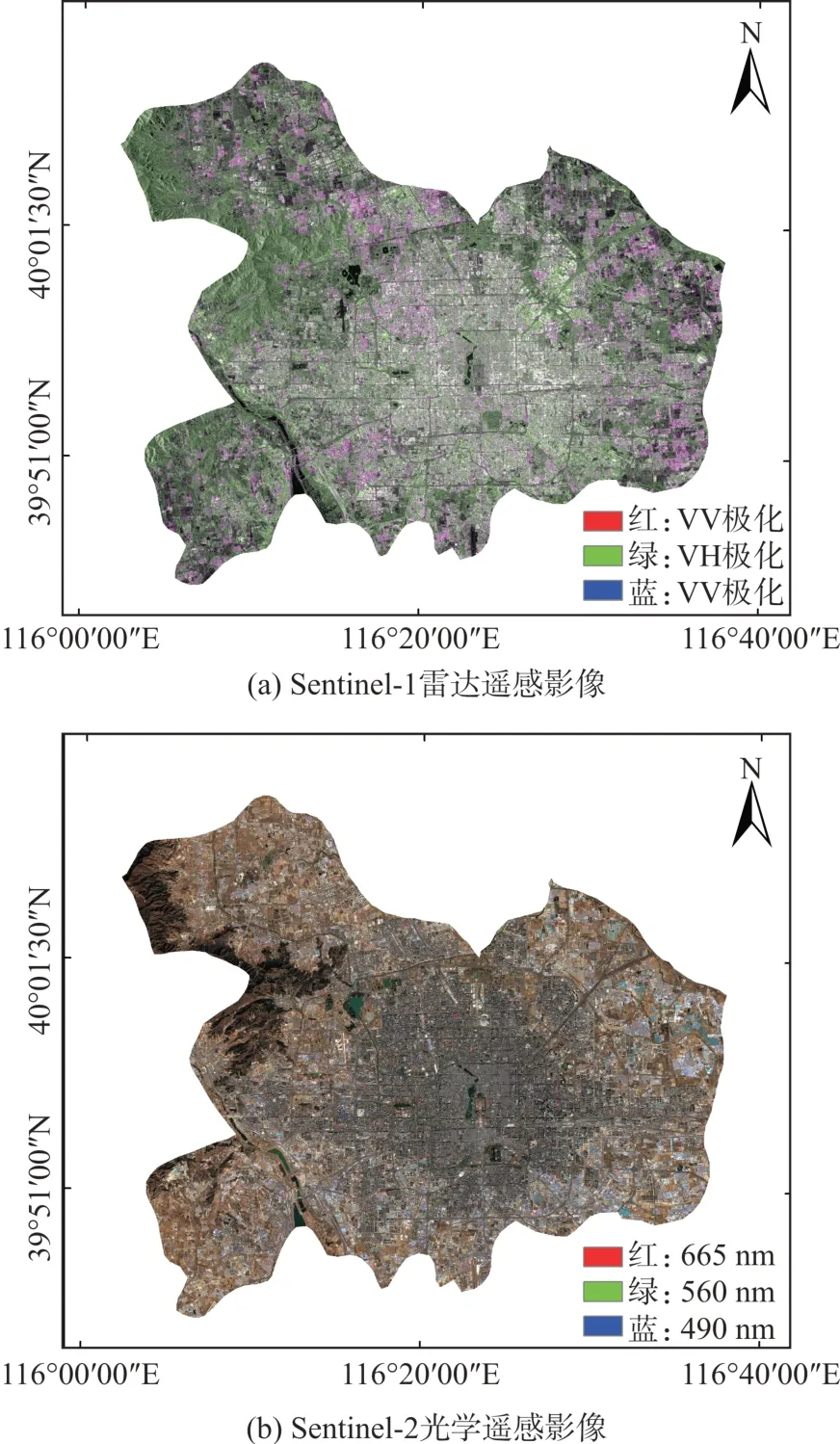
图2 晴朗天气影像数据Fig.2 Image Data in Clear Weather

图3 暴雨期间Sentinel‐1雷达遥感影像Fig.3 Sentinel⁃1 Radar Image During Heavy Rain
图4中既有水域指融合影像的水体提取结果,故宫护城河、北海公园、颐和园及河流等有清晰轮廓,说明水体被准确识别,但仍可观察到有细碎对象被错误识别。这是因为尽管面向对象分类已经受到广泛关注,并且已有多种方法可评估图像分割的准确性,但仍处于未成熟阶段[14],还存在很多分割不足或过度分割现象。图4中蓝色区域为暴雨造成的短期积水分布情况,湖泊、河流边缘比既有水域略有扩大,暴雨期与晴天相比,其影像分类精度略有下降。考虑到暴雨的影响、水体表面的反射及城区内密集的建筑物会使得雷达图像的后向散射特定因素严重阻碍洪水检测[15],例如众多的角反射器效应等,可认为分类结果较为良好。
由北京市积水点数据可得混淆矩阵精度评价结果,见表1。晴天融合影像分类结果的用户精度、生产精度、总体精度均大于75%,甚至达到98.74%;雨天雷达影像分类结果的用户精度、生产精度、总体精度均大于70%,这表明两者的分类结果都较精确,且后者分类精度略低于前者,与图示一致。

表1 精度验证结果/%Tab.1 Accuracy Assessment Result/%
由图4可知,暴雨期间水量显著增加,且结合北京市城区图可知,积水主要表现在远离市区的边缘地区,尤其是位于北京市城区西北方向的沟壑众多的丘陵地区;其次,积水主要集中在丰台区、朝阳区及万柳地区等地势低洼处,例如西三环丰台北路路口、北二环和平里西路及望和桥等。积水十分影响人民正常生活和道路交通。

图4 面向对象分类水体提取及变化检测结果Fig.4 Object⁃Oriented Classification Water Extraction and Change Detection Results
4 结束语
Sentinel影像的优势在于它由ESA免费提供,并且ESA也提供了简单预处理影像的插件[16],通过雷达和光学影像的融合及面向对象分类的方法,可以在保证空间分辨率和光谱分辨率的同时,利用更多的空间纹理特征,获得准确的积水空间分布情况。本文研究了基于雷达影像和光学遥感影像实时监控城市内部暴雨积水情况的基本技术流程,可将研究结果与当地排水系统及地面高程信息结合起来,以获取精准的城市内涝信息。