水下机械手水动力学分析及控制方法研究
2022-05-31裴香丽张明路
裴香丽,田 颖,张明路
(河北工业大学,天津 300130)
0 引 言
随着工业化步伐加快,人们对海洋资源的勘探与开发日益深入,在高压、高盐度、高腐蚀性的极端海洋环境中,水下机械手正在逐步代替人工完成资源勘探、管线检修、海洋地貌检测、目标追踪等工作[1]。为了使水下机械手能够更加精确地高效作业,研究人员尝试提出了各种不同的控制方法[2]。
一些研究者基于水下机械手的动力学模型采用了经典控制方法,如PID 控制[3-4]、最优控制、确定性反馈控制[5]等;其他研究者则提出了智能控制方法,包括模糊控制[6-7]、滑模控制[4]、鲁棒控制[8]等控制方法等;也有研究者根据实际需求,将以上方法进行融合或改进,如自适应滑模PID 控制[4,9-11]、模糊滑模控制[12-13]等。但大多数控制方法将水流影响视为外部干扰[4,7,11],或直接将工作环境简化为静水环境[6,12],导致控制方法适用的水体环境与实际环境存在较大差距,影响了水下机械手控制精度和作业效率。基于以上考虑,本文提出建立定向流影响下的水动力学模型,进而得到基于水动力学模型的机械手动力学模型。利用RBF神经网络对浮力部分、水阻力和附加质量力部分分别进行在线逼近,利用鲁棒自适应控制律对时变参数以及非结构非线性不确定性的影响进行补偿,提高系统的稳定性。
1 水下机械手水动力学模型及仿真
水下机械手受到流体造成的浮力、水阻力、附加质量力等因素的影响,其动力学模型较为复杂,已知的研究大多采用半理论、半经验的方法将部分水动力学参数融入到机械手的动力学方程中,最终获得水下机械手动力学模型[14-15]。本文考虑定向流对水下机械手的影响,基于Morison 公式建立水下机械手的水动力学模型并进行仿真。
1.1 水下机械手简化模型
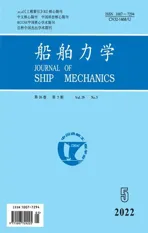
本研究针对的研究对象为双臂水下机械手。由于双臂水下机械手运动范围大、灵活度高,成本较低,相较于单杆机械手和多杆机械手应用更为普遍,具有典型性和代表性。图1为双臂水下机械手结构简图,将杆1 和杆2 视为匀质刚性杆,且两杆之间为铰接副。
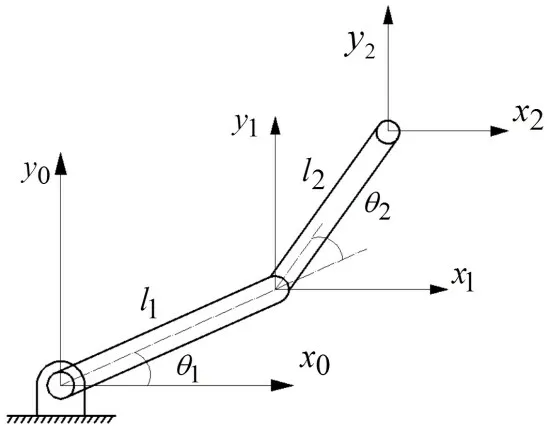
图1 水下机械手结构简图Fig.1 Diagram of manipulator structure
1.2 双臂机械手的水动力学模型
当单个刚性杆在有流液压环境中运动时,其受到水流的作用力在单位长度上的大小表示为

式中,Fd为水阻力,Fm为附加质量力,Ff为浮力,Fl为升力。由于升力Fl与物体是否存在翼型冲角结构有关,此处水下机械手无此结构,故忽略不计;水阻力Fd为刚性机械手进入黏性流体中受到的沿着来流方向的阻力;附加质量力Fm是机械手加速运动时受到的黏性水流的反作用力;流干扰下的水阻力Fd和附加质量力Fm利用Morison公式计算,其矢量形式为

式中,Cm表示附加质量力系数,Cd表示水阻力系数,ρ表示黏性流体的密度,D表示等效面积,A表示垂直于来流方向的投影面积。
由于直接计算刚性机械手在定向流干扰环境下的水阻力和附加质量力矩较为复杂,故将其简化为两部分,分别计算刚性机械手在静水中搅水受力(图2(b))和定向流中以任一位姿静止受到的黏性水流冲击力[15](图2(c))。

图2 单个运动体的水动力分解示意图Fig.2 Schematic diagram of hydrodynamic decomposition of a single moving body
运动体以T1为瞬时转动轴做旋转运动,θ1为运动体轴线方向与x轴的夹角,角速度ω1=θ̇1。在运动体上取一个微段,微段到旋转轴的矢量为r1。微段的线速度方向与运动体轴线垂直,即V0=ω1×r1。
首先考虑杆1 在静水环境下,运动体自身运动搅水受力。运用式(2)计算微段受力,沿着运动杆件轴线方向积分得到合成力矩。

其次,运动体自身保持任一位姿不变时,水流冲击引起流体与杆件的相对运动,考虑水流定向流动,设水流的速度为u,将水流简化为若干不计大小、形状的质点,则水质点的速度为u,运动体轴线方向的单位矢量e=[ex ev ez]T。ex=cosθ1,ev=sinθ1,ez=0。将水质点的速度在坐标系O-XYZ下按三个坐标轴方向分解,则u=[ux uv uz]T,将水质点的速度转换为垂直于杆件轴线的速度v。

代入式(2)计算合成力矩为

分析计算杆2所受的水动力,根据图1建立双臂机械手的D-H坐标系如图3所示,采用与杆1相同的方法分析并计算杆2的水动力。

图3 机械手坐标简图Fig.3 Manipulator coordinate diagram
首先考虑静水环境下,杆L2绕着Z1旋转,并随着L1绕Z0复合运动,在杆2 上取微段。此时l为微段距离杆2 关节坐标系OX1Y1Z1原点距离。
杆2 绕Z0旋转速度vz0=ω1×rz0=,其中,rz0为微段到z0轴的距离,折算vz0垂直于杆2 轴线方向上为vnz0=vz0cosβ1,β1为L2轴线与rz0的夹角且β1= arccos((l2+r-l1)/(2lrz0))。
关于关节轴Z0求解的合成力矩为

考虑耦合因素影响,当L2绕轴Z0旋转时,L2所受水阻力对Z1轴产生的合成力矩为

杆L2绕Z1旋转速度vz1=ω2×rz1=ω2l,其垂直于L2轴线,则计算对Z1产生的合成力矩为

考虑耦合因素影响,杆L2仅绕Z1旋转,L2所受水动力通过关节传递到杆L1,因而对Z0轴产生力矩

其次,当机械臂保持空间某个姿态静止时,通过Morison 公式计算水流对L2造成的水动力矩。杆L2轴线方向单位矢量e=[ex ev ez]T。ex=cos(θ1+θ2),ev=sin(θ1+θ2),ez=0。水质点的速度为u,u=[ux uv uz]T,将水质点的速度转换为垂直于L2轴线的速度v,v=[vx vv vz]T=e×(u×e)=[N]u。
受耦合因素影响,L2受水流冲击力对Z0轴也产生力矩,运用Morison公式计算可得

杆L2冲击受力对Z1轴的力矩为

综上所述,两个关节的力矩为

1.3 水动力学仿真分析
表1和表2分别为水体环境参数与水下机械手参数。由图4显示的两关节浮力仿真结果可知,水体浮力对关节力矩的影响较大,且对杆1关节力矩的影响更加显著,因而需要考虑补偿。由图5和图6显示的两关节的水动力仿真结果可知,当水体的流速比较小时(u<1.0 m/s),可以忽略水阻力和附加质量力对关节力矩的影响,仅对浮力项进行逼近;当水体流速较大时(u≥1.0 m/s),不仅要考虑浮力的逼近,还要考虑水阻力和附加质量力的逼近;当水体流速以正弦波变化时,会对关节的控制力矩带来扰动,影响跟踪效果,增加控制难度。
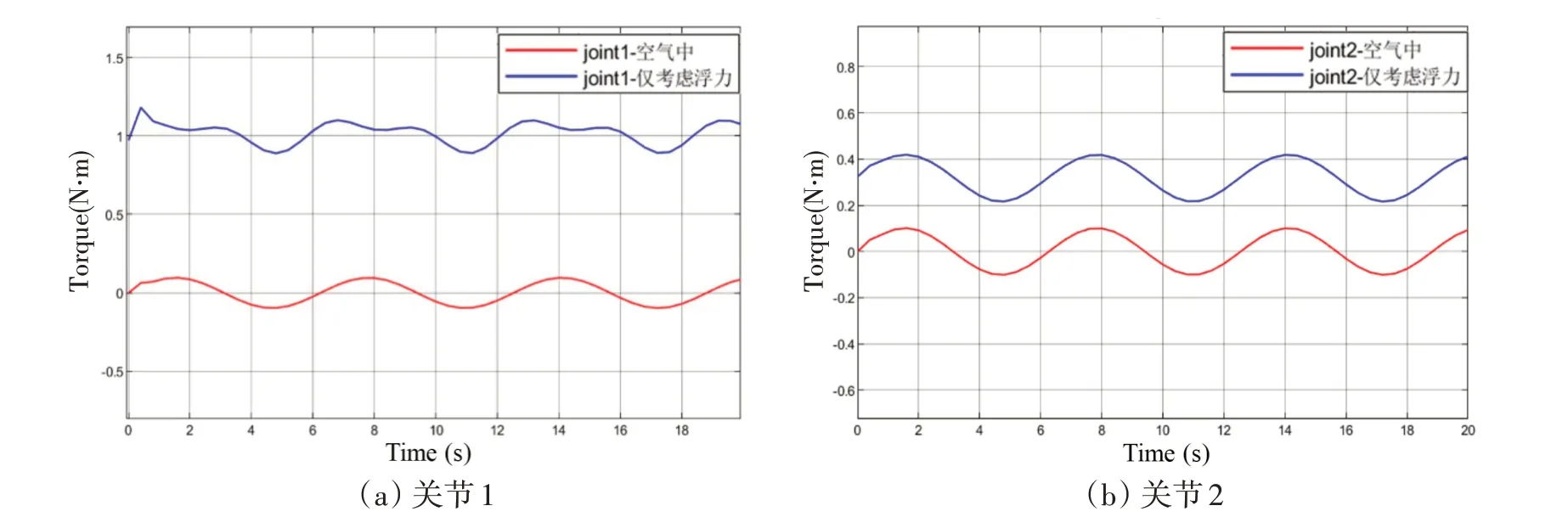
图4 两个关节的浮力仿真结果Fig.4 Buoyancy simulation results of two joints
图5 两个关节的水动力仿真结果Fig.5 Hydrodynamic simulation results of two joints
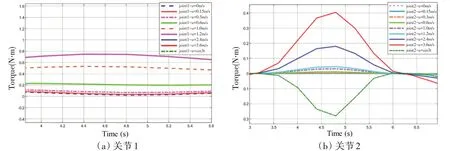
图6 两个关节水动力仿真的局部放大结果Fig.6 Local amplification results of hydrodynamic simulation of two joints

表1 水体环境参数Tab.1 Parameters of water environment

表2 水下机械手参数Tab.2 Parameters of underwater manipulator
2 基于水动力学模型的机械手动力学建模
基于上文中的水动力学模型,采用Lagrange 法即可得到定向流影响下基于水动力学模型的机械手动力学模型为

上述矢量形式可以简写为

式中,M(θ)为惯性力矩,C(θ,θ̇)为科氏力和离心力矩,G(θ)为考虑浮力的等效重力矩,Ff(θ̇)表示关节摩擦力矩,τh为水阻力矩和附加质量力矩,τ为关节控制力矩,其中,

关节摩擦力可表示为关节角速度的函数Ff=c(θ̇)。
3 定向流下水下机械手基于RBF神经网络的逼近控制算法
传统的反馈控制、PID控制等方法较适合于解决线性、时不变性等相对简单的控制问题,当面对定向流影响下的水下机械手这一类强耦合、非线性、时变性、不确定性的复杂系统时,由于无法获得精确的数学模型,且大多需要进行与实际系统不符合的线性化假设[2,16],使得传统控制方法无法满足复杂系统的实际控制需求,本文提出了一种基于RBF神经网络的自适应鲁棒控制方法(图7)。
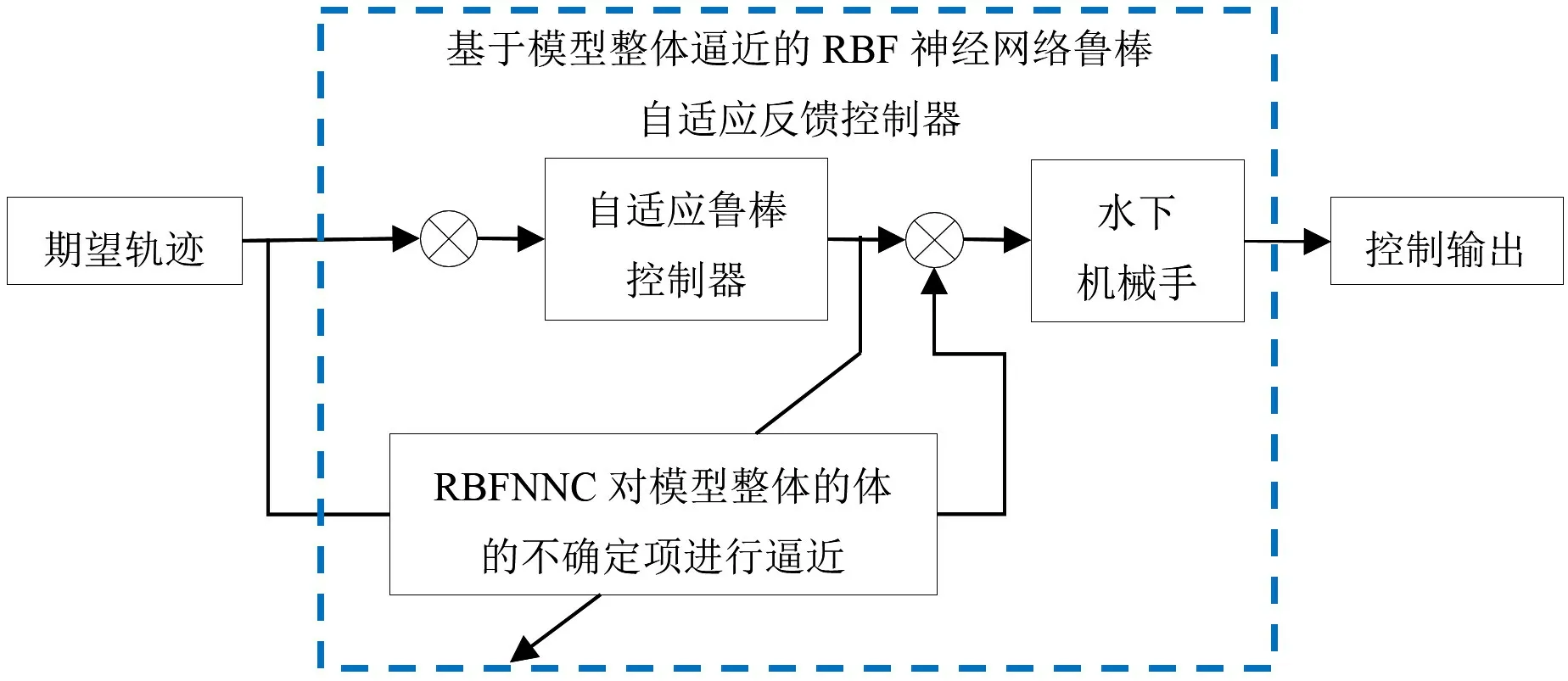
图7 控制算法结构图Fig.7 Diagram of control algorithm structure
3.1 基于RBF神经网络的自适应鲁棒控制
双臂水下机械手系统的方程如式(13),考虑系统的参数未知但有界,针对式(13),运用RBF 神经网络对模型整体进行逼近。
定义误差为e(t)=θd(t)-θ(t),误差函数为r=ė+Λe。其中,Λ=ΛT>0,当r→0时,e→0,ė→0。

式中,

考虑实际情况,模型的不确定项f是未知的,因此,需要对不确定部分f进行逼近。采用RBF 神经网络逼近上述不确定部分,由被逼近项的表达式(15),将网络的输入取为

理想的RBF网络算法为

RBF神经网络的输出为

式中,ν为用于克服神经网络逼近误差ε的鲁棒项。
将控制律式(18)代入式(14),得

3.2 自适应律及稳定性分析
系统的稳定性是首先要考虑的问题之一,它关系到系统是否能够正常工作。经典控制理论中已经建立了Routh判据、Huiwite判据、Nquist判据等来判断线性定常系统的稳定性,但不适用于非线性和时变系统。Lyapunov提出的稳定性理论是确定系统稳定性更一般的方法,不仅适用于单变量、线性定常系统,还适用于多变量、非线性时变系统[15]。基于Lyapunov理论,本文进行如下稳定性分析:
将式(19)代入上式,可得

根据多关节水下机械手的物理特性可知rT(Ḋ-2C)r=0。取Ŵ̇=-FWφrT,即神经网络自适应律为

则有

由于当且仅当r=0 时,L̇=0,即当L̇≡0 时,r≡0。根据LaSalle 不变性原理,闭环系统趋于稳定,即当t→∞时,r→0,系统的收敛速度取决于Kv的选取。又因为L≥0,L̇≤0,则当t→∞时,L有界,从而Ŵ有界。
4 仿真实验
4.1 计算力矩前馈控制法
计算力矩前馈控制方法[5]是一种应用较为普遍的经典控制方法,因此将本文方法与之进行比较,对比方法的数值仿真结果如图8~9所示。

图8 两个关节的位置跟踪结果Fig.8 Position tracking results of two joints
由机械臂两个关节的数值仿真结果图8(a)可以看出,计算力矩前馈控制可以实现基本的轨迹跟踪且响应时间小于等于0.25 s,可见传统的计算力矩前馈控制方法具有可靠性和有效性;但进一步观察图8(b)与图9 两个关节的误差曲线看出,尽管两个关节能够到达期望位置,但缺点是误差很大,尤其是关节1,其误差值明显高于关节2的误差值。
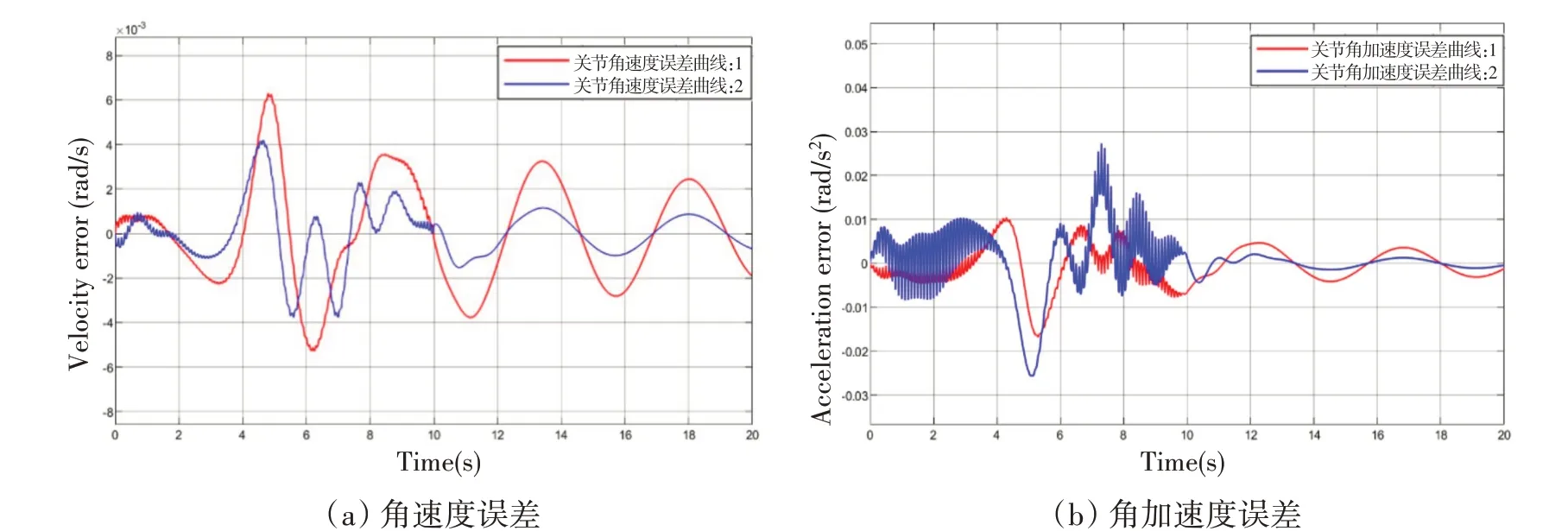
图9 两个关节的角速度和角加速度误差Fig.9 Angular velocity and angular acceleration errors of two joints
4.2 基于RBF神经网络的自适应鲁棒控制
RBF神经网络中高斯基函数参数的取值对神经网络控制起着重要作用,如果参数取值不当,将会导致高斯基函数无法得到有效的映射,使神经网络失效[11]。因此按照神经网络具体输入值的范围进行取值,该RBF神经网络的输入层、隐含层和输出层的神经元数量依次设为5、5和1,网络的初始权值矩阵中各个元素的值取为0.1,设置系统的初始状态为[0.09 0 -0.09 0],两个关节的期望关节角指令分别设置为θ1d和θ2d,控制律中其他各参数的具体取值如表3所示。

表3 控制律参数Tab.3 Control law parameters
为充分验证本文方法在不同水流速度下的控制效果,在数值仿真过程中,分别设定流速相对较小(即u=1.2 m/s)和流速相对较大(即u=3.6 m/s,)的两组模拟实验,其中,流速相对较小的数值实验结果如图10、12(a)和图13~14所示,流速相对较大的数值实验结果如图11、12(b)和图15~16所示。
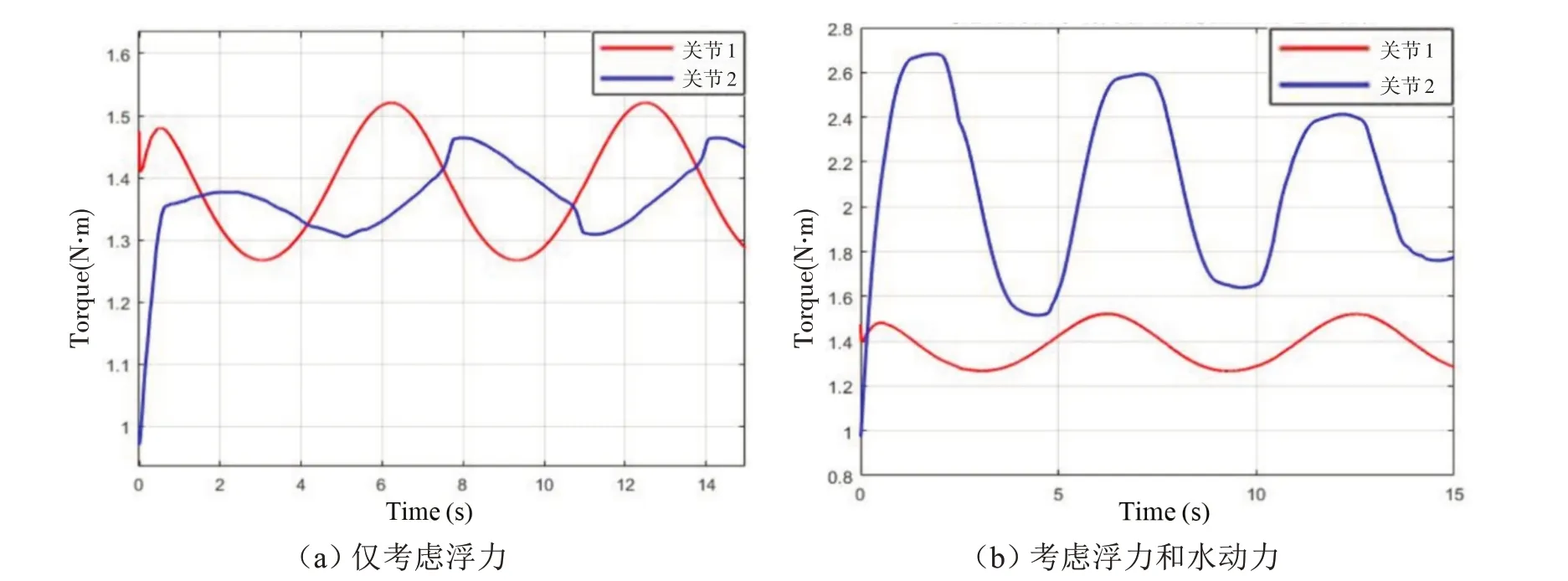
图10 RBF神经网络的逼近结果(流速较小)Fig.10 RBF neural network approximation results(low flow rate)

图11 RBF神经网络的逼近结果(流速较大)Fig.11 RBF neural network approximation results(high flow rate)
图10 和图11 表示利用RBF 网络在流速不同时对浮力和水动力进行逼近的结果,图12 表示不同流速下两个关节的控制输入情况。由图13(a)和图15(a)两个关节的跟踪曲线可知,RBF 神经网络的逼近结果比较满意,两个关节都能够按照预期轨迹运动,在响应时间上相较于计算力矩法略有延长,在流速较小时响应时间为0.378 s,在流速较大时响应时间为0.384 s,但无论流速多大,响应时间的最大涨幅均小于0.15 s;并且,从图12 可以看出两关节所需要的控制力矩均在一定范围内波动,且没有突变。
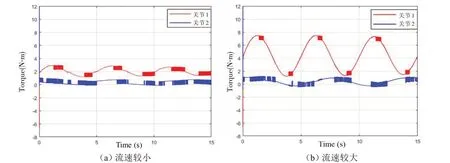
图12 两个关节的控制输入Fig.12 Joint control input of two joints
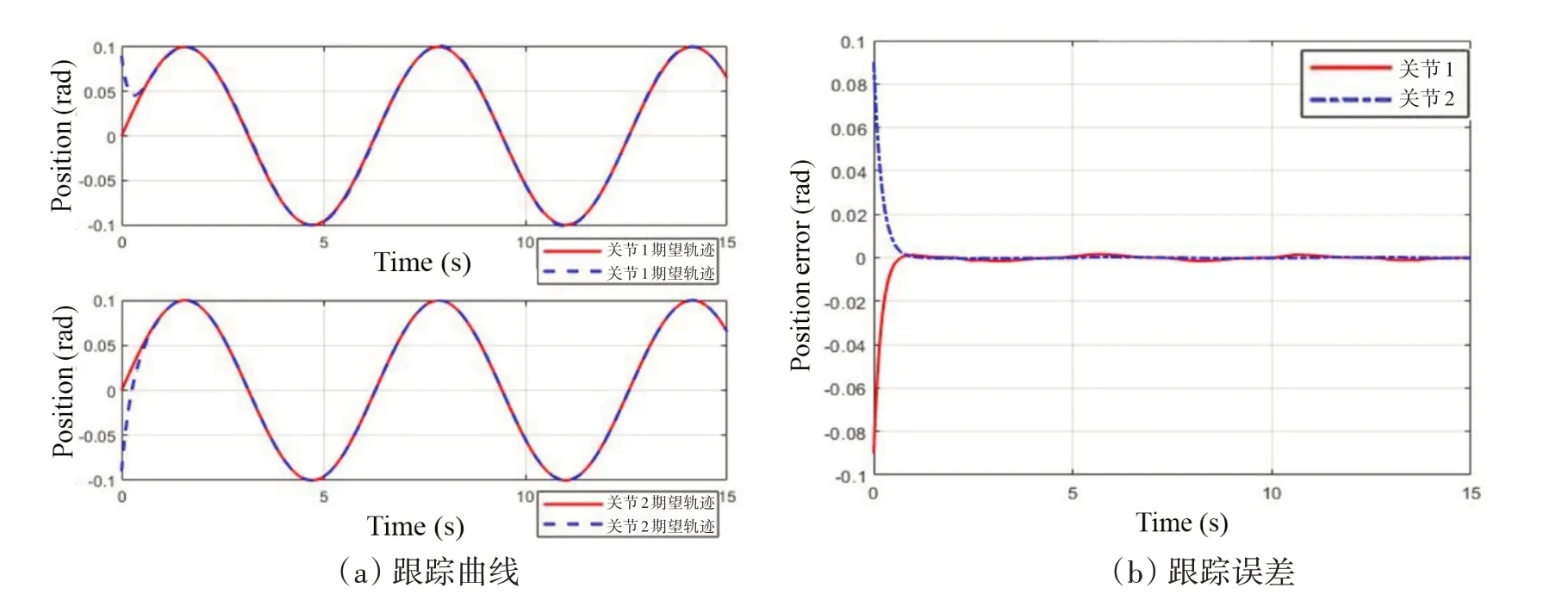
图13 两个关节的位置跟踪结果(流速较小)Fig.13 Tracking results of two joints(low flow rate)
图15 两个关节的位置跟踪结果(流速较大)Fig.15 Tracking results of two joints(high flow rate)
图13(b)和图15(b)分别表示在流速不同时的关节角误差,图14 和16 则表示流速不同时的角速度和角加速度误差。在流速较小时,关节角的平均误差最大不超过1.652×10-3rad,关节角速度的误差最大不超过1.939×10-4rad/s,关节角加速度的最大误差不超过4.706×10-5rad/s2;在流速较大时,误差略大于流速较小的情况,但关节角误差最大不超过6.981×10-3rad,关节角速度误差最大不超过2.338×10-4rad/s,关节角加速度误差最大不超过1.14×10-4rad/s2。

图14 两个关节的角速度和角加速度误差(流速较小)Fig.14 Angular velocity and angular acceleration error of two joints(low flow rate)
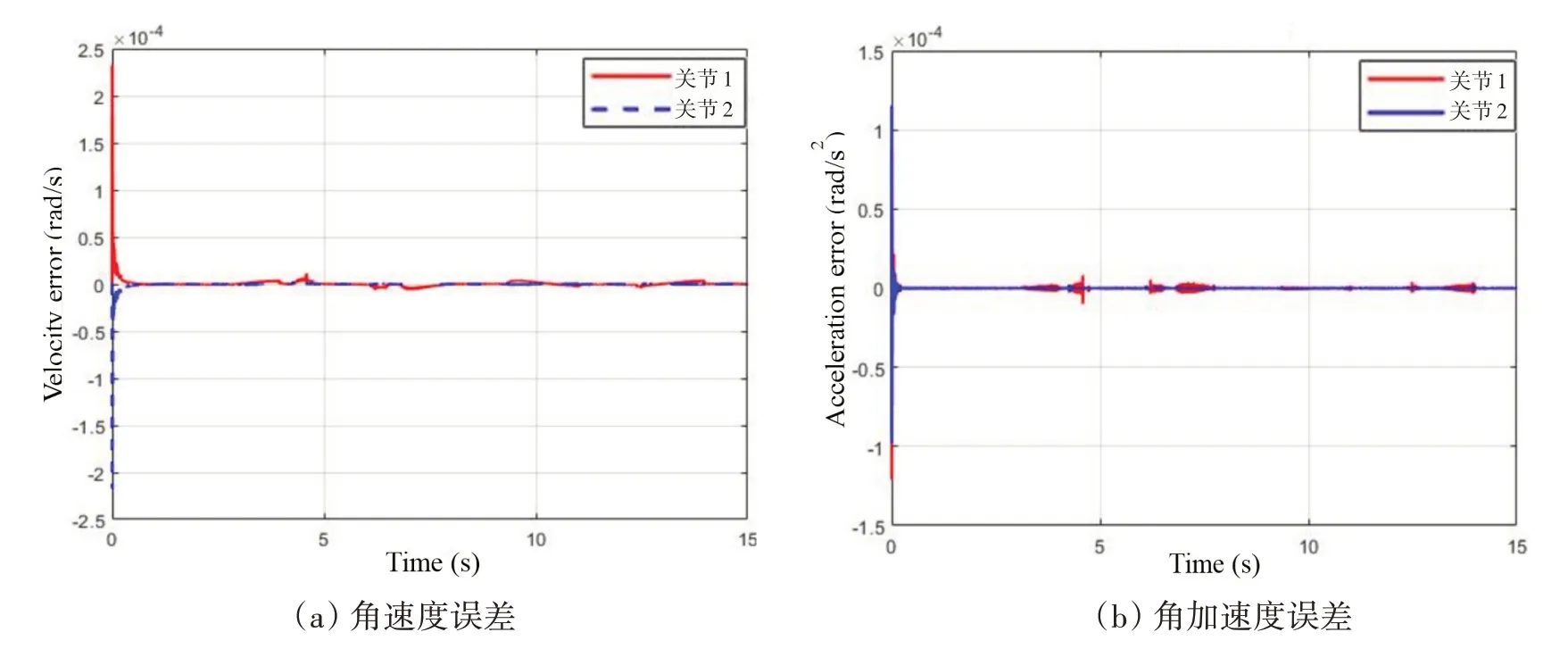
图16 两个关节的角速度和角加速度误差(流速较大)Fig.16 Joint angular velocity and acceleration error(high flow rate)
计算力矩法与本文方法的误差对比结果(表4)显示,无论水流速度大小,基于RBF 神经网络逼近的自适应鲁棒控制方法都能在兼顾实时性的同时保证控制的精确性,明显优于传统的计算力矩前馈控制法,因而具有良好的控制效果。
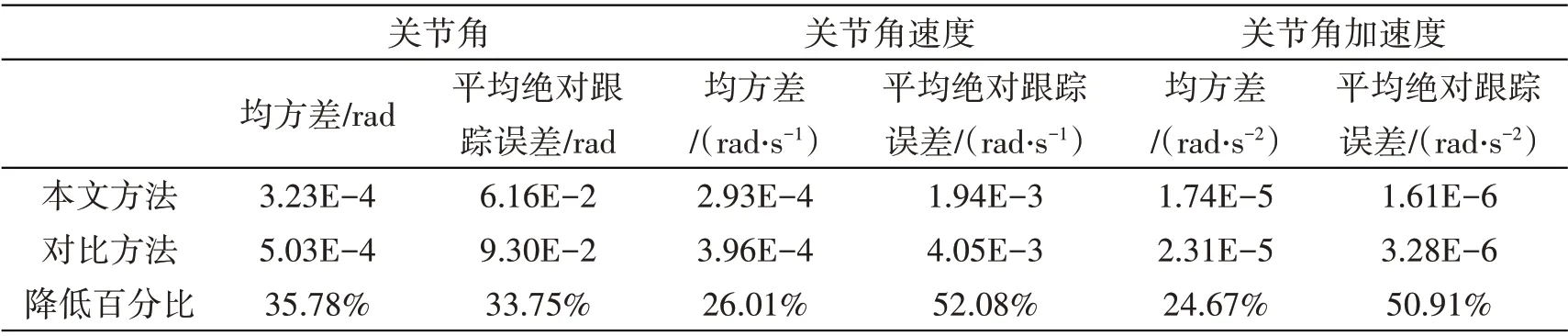
表4 不同方法的跟踪误差比较Tab.4 Comparison of tracking errors of different methods
5 结 语
本文首先利用Morison 公式建立了机械手在定向流影响下的水动力学模型,由此进行了数值仿真。仿真结果显示:在流速较小(u<1.0 m/s)时,可以只考虑浮力的逼近;当流速较大(u≥1.0 m/s)时,不仅需要考虑浮力的逼近,还要考虑水阻力和附加质量力的逼近。
基于水动力学模型,本文通过Lagrange 方程得到定向流影响下的机械手动力学模型,进而建立基于RBF神经网络进行模型整体逼近的自适应鲁棒控制方法,把数值仿真结果与计算力矩法相比,在保证响应时间涨幅小于0.15 s 的前提下,使关节角、关节角速度和关节角加速度误差分别降低了35.78%、26.01%和24.67%,证明该控制方法在控制误差、稳定性、自适应性等方面均表现出良好的控制性能,研究结果可为定向流影响下水下机械手的水动力学分析以及运动控制提供有价值的参考。