水质监管船的无人驾驶技术研究
2022-05-30陈玲孟巧周陈炎袁萍
陈玲 孟巧 周陈炎 袁萍

摘要:为解决水域环境更加复杂的水质监管问题,抓住现有水质监测装置智能程度不高,综合性不强,效率与质量无法并存等缺陷。考虑采用水质监管无人船代替人力进行操作,完成了水质监管船的整体设计方案,重点围绕水质监管船的无人驾驶技术展开研究,确定采用GPS定位系统与INS惯性导航系统相结合的组合导航定位模式,同时采用RRT路径规划算法实现路径规划。只有落实无人驾驶技术的真正应用,才能推进水质监管船实现彻底解放人力的同时大幅提升水体检测的效率与质量,促进水环境的可持续发展。
关键词:无人驾驶;GPS;INS惯性导航;路径规划
一、引言
随着国民经济的发展,水环境问题日趋严重。《江苏省水污染防治条例》已经于2021年5月1日起正式施行,条例将水环境保护工作作为政府的重点工作内容之一,明确保障水污染防治的财政投入,完善水污染防治制度,研究解决水污染防治重大事项。可见水环境保护越来越受到国家重视,水环境监测作为水环境保护的重要环节,对于水域的科学管理发挥着重要作用。
进入21世纪,世界各国均对水质监测领域开展深入研究,美国已经建成了覆盖全国水质的自动化监测系统,实现了水质的实时监测和污染的预警功能。澳大利亚在其国内建立了水质监测网络系统,基于系统实现了对水质的实时监测管理。日本已经完成自动水质监测站点建设,站点共计一百六十多座。国内水质监测系统的研究工作也是蓬勃发展,目前已经基本建立起水质监测网,能够实现对主要流域的水质监测管理。
同时国内外加强研发针对水质监测的无人船系统,进一步提升水质监测的时效性和科学性,多家单位也已完成应用于水环境监测领域的无人船的设计与建造。美国麻省理工学院研发出“ARTEMIS”无人船,基于设置的导航系统和控制系统,配备诸多传感器,实现水体数据的检测与反馈[1]。英国普利茅斯大学某研究单位设计研发的“Springer”号[2],即使在GPS信号丢失的情况下仍然能够完成导航任务,完成沿海水域的水体数据检测与反馈。我国自然资源部研究开发的“USBV”号[3],上海大学研发的无人船可以实现深水区域的作业检测。可见,目前无人船已经成为各国在水域作业方面研究的重点。
二、水质监管船的整体构成
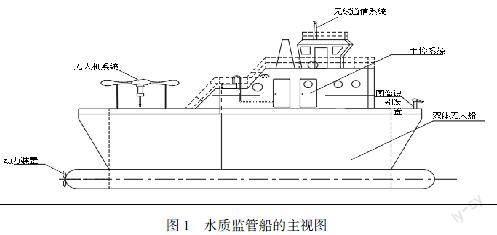
水質监管船主要由双体船、航行控制系统、无人机系统、水体监测系统、无线通信系统、地面站监控装置等组成。该水质监管船可实现自主航行,通过GPS定位导航技术,结合INS惯性导航系统进行导航定位,采用RRT路径规划算法进行路径规划,利用船上的图像识别装置可以实时采集水域环境的影像。水质监管船的动力装置位于船体尾部,采用常规动力双螺旋桨的推进方式,以电力为动力,能源环保。水质监管船通过水体检测系统实现对监测水域的水体检测,通过无人机配备实现对远程水域的航拍功能,通过船上搭载的多种传感器及辅助设备实现对水质的自动采样和参数pH值、溶解氧、电导率及温度数据测量。基于无线通信系统可以完成无人船与地面站系统之间的数据传输,通过数据传输获悉无人船的实时作业情况,水质监管船的主视图如图1所示。
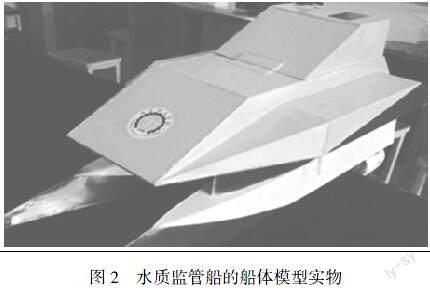
水质监管船的船身主体采用小水线面双体船,船身由两个潜水体和一个水上箱体构成,其典型特征就是水线面积小、稳性好。由于远离水表面的下潜体占据小水线面双体船排水量大部分,当它在波浪中航行时,所受到的波浪扰动力比常规单体船和常规双体船小很多。所以,小水线面双体船的耐波性比同等排水量的单体船好,且横摇周期长,经实船验证小水线面双体船横向运动小。无人船的螺旋桨安装在水下潜体尾部,螺旋桨工作区域伴流均匀,使得船身效率较高。水质监测船的水下单体设计是从船首V型过渡到船尾U型。船首采用V型设计,考虑到提升船首的横向斜升角,这样可以减小无人船的波浪冲击阻力,从而提高船舶的航向稳定性,改善无人船的首部摇晃情况,提高无人船的适航性 [2]。船尾采用U型设计,考虑到U型设计有利于提高螺旋桨的推进效率,减小空泡的不良效应,提高无人船的航行速度,基于船身主体的设计方案完成的水质监管船的船体模型如下图2所示。
三、无人驾驶技术研究
水质监管船的导航定位和路径规划作为无人驾驶的核心技术直接影响着船舶的安全航行。水质监管船的导航定位是其进行路径规划的前提和基础,不仅要为船舶的路径规划提供起点,并且要监测水质监管船的实时运动状态数据,当水质监管船遇到障碍物发生路径调整重新复航时要实时提供位置信息。路径规划技术就是规划水质监管船从初始点到目标点的一条安全航行路径,该路径可以有效规避水域环境中的障碍物,是一条安全、最优的水域路径。研究水质监管船的无人驾驶技术重点就是研究导航定位技术和路径规划技术。
(一)导航定位技术
导航定位技术是在水质监管船航行的过程中实时获取无人船的数据信息,包括位置信息、速度信息、姿态信息等,精准的数据信息获取直接影响到水质监管船的航行,一旦出现导航定位的误差,那么水质监管船航行安全得不到保障。目前普遍使用的导航定位技术主要包括GPS定位导航技术、INS惯性导航技术等,然而GPS定位导航技术和INS惯性导航技术均有着各自的优缺点。 GPS定位导航技术虽然定位精度高,但容易受到外界环境影响,一旦外界环境的网络信号存在不稳定的状态会直接影响定位的时效性。区别于GPS定位系统,INS惯性定位系统不容易受到外界环境的影响,它是基于自带的传感器装置获取数据信息,然而由于传感器本身的固有误差,随着时间推移会导致定位误差的存在。
基于单一导航定位技术优缺点的分析,同时考虑其在实际应用中存在的问题,水质监管船的导航定位采用GPS定位系统与INS惯性导航系统相结合的组合导航定位模式。GPS定位系统是通过卫星为水质监管船提供实时的位置信息,主要包括:经度、纬度、航速、航向等相关数据[4]。当水质监管船处于信号不好的水域环境时,此时可以依赖INS惯性导航系统保持航行。水质监管船接收到的GPS经纬度数据(lat0,lng0)作为初始的位置数据,此时速度v0作为水质监管船的初始速度,航行时间后水质监管船速度为v(t),水质监管船的位置为(latT,lngT),具体公式如下(1)、(2)所示:
(1)
式中:为水质监管船在航行t时间后的加速度
(2)
式中:为水质监管船在航行t时间后的航向角
此时基于INS惯性导航系统就可以获得水质监管船的下一目标位置,因此通过这种GPS定位系统与INS惯性导航系统相结合的定位模式可以弥补单一定位系统的不足,可以实际应用到水质监管无人船上,实现水质监管无人船的高精度定位,实时高校获取船的位置信息为路劲规矩奠定有效基础。
(二)路径规划技术
路径规划技术是无人船技术研究的核心问题,路径规划是指水质监管船在水域环境中能够按照一定的标准,搜索出能够绕开航行过程中遇到的未知障碍物的最优或次优路径[5]。路径规划的精准度直接关系着水质监管船的安全航行,同时决定了水质监管船完成水体检测作业任务的效率。目前的路径规划算法有人工势场法[6]、神经网络法[7]、遗传算法[8]等,水质监管船采用快速搜索随机树算法(Rapidly-exploring Random Tree),简称RRT算法。RRT算法是典型的采样规划算法,无需对搜索空间进行划分,可以尽可能探知未知区域,首先以状态空间中的初始点作为整个搜索树的根节点,然后根据设置函数在搜索区域中生成一个随机点,基于设定约束条件寻找搜索其在搜索树上的父节点。接着基于设置的约束,系统在父节点与随机点之间得到新的节点。最后确定产生的新节点是都能够达到目标位置,如果能那就形成一条规划路径,如果不能那么重复上述操作步骤,直到产生的新节点满足要求为止。RRT算法扩展树的具体结构如图3所示。
添加到搜索树中的新节点在时间范围不断迭代,如果不在终点允许范围内会继续添加新节点;如果新节点在终点允许的范围内,那么返回随机树以及路径,规划成功,具体如图4所示。
四、结束语
水域環境的科学管理,水资源的可持续利用是社会、经济可持续发展的重要基石。目前国家越来越重视水环境问题,积极发布相关政策推定水域的科学管理,水质监测作为水环境管理的重要任务,是一项长期艰巨的项目工程。随着科技的跨越式发展,水质监测行业已经融入了物联网、大数据等最新的技术。水质监管无人船的开发与设计具有无限的发展前景,围绕其开展无人驾驶技术的研究至关重要。水质监管船搭载GPS/INS组合导航定位模块实现无人船的精准定位,基于RRT算法实现无人船的路径规划,通过导航定位技术和路径规划技术实现水质监管的无人驾驶技术。只有实现无人驾驶技术的真正应用,才能推进水质监管船实现彻底解放人力的同时大幅提升水体检测的效率与质量。
作者单位:陈玲 孟巧 周陈炎 袁萍 南通理工学院 电气与能源工程学院
参 考 文 献
[1] Manley J E. Unmanned surface vehicles, 15 years of development :OCEANS 2008,2008[C].IEEE.
[2]NAEEM W,XU T,SUTTON R, et al. The design of a navigation, guidance, and control system for an unmanned surface vehicle for environmental monitoring[J].Journal of Engineering for the Maritime Environment,2008,222( 2) : 67-79.
[3]金久才,张杰,邵峰,崔廷伟.一种海洋环境监测无人船系统及其海洋应用[J].海岸工程, 2015,34(03):87-92.
[4]Yang Liu., Yong Cheng. Vehicle Control Unit Integrated with GPRS/GPS Development for Electric Vehicle[J]. Advanced Materials Research, 2013, 2385(10): 2680-2684.
[5]王稷尧,袁锋伟.一种改进的RRT路径规划算法[J].机电工程技术,2022,51(03):161-164+298.
[6]王迪,李彩虹,郭娜,等.基于人工势场法的移动机器人局部路径规划[J].山东理工大学学报(自然科学版),2021,35(1):21-26.
[7]郑以君.基于神经网络改进粒子群算法的机器人路径规划研究[D].南宁:广西大学,2019.
[8]王怀江,刘晓平,王刚,等.基于改进遗传算法的移动机械臂拣选路径优化[J].北京邮电大学学报,2020,43(5):34-40.
