果蔬食品包装机控制系统的设计研究
2022-05-30林敏

摘要:生活水平的提高,带动了果蔬食品需求的增长。为提高果蔬类食品的包装效率及包装质量,设计了基于DSP的果蔬食品包装机控制系统。综合分析果蔬食品包装机的工艺流程及基本结构,结合DSP及触摸屏研究了包括温控模块、触摸屏、IO信号采集模块、DSP控制模块及伺服驱动的控制系统硬件部分,同时开发了包括控制系统主程序及人机界面的全自动果蔬食品包装机运动控制系统软件部分。将设计系统应用于传统果蔬食品包装机进行试验分析,由试验结果可知,包装机工作稳定,效率大幅提升,良品率为98%以上,符合包装工艺需求。
关键词:果蔬食品;包装机;控制系统;DSP;硬件系统;软件系统
中图分类号:TP301 文献标识码:A
文章编号:1009-3044(2022)31-0087-03
1 引言
经濟的飞速发展及生活水平的提高,带动了果蔬食品的需求突增。消费者不仅重视果蔬食品质量,而且越来越关注包装质量,因此,包装质量好且精致的果蔬食品更会受消费者青睐[1]。这在一定程度上带来了包装行业的发展机遇。包装机械在医药、烟草、日用品等方面得到广泛应用,但果蔬食品包装存在包装质量差、效率低、操作困难的问题,专用包装机尚不成熟[2]。
随着自动化技术在食品包装机械中的应用,果蔬食品包装机的工作稳定性、可靠性及包装效率大幅提升,因此自动化及专业化成为当前果蔬食品包装机的研究方向。包装机械的发展经历了由单变频到三伺服的六个发展过程,最新的三伺服全自动式包装机在改进包装质量方面表现突出,尤其是包装效率获得大幅提升[3]。对此,基于全自动三伺服包装机,优化改造为果蔬食品专用包装设备。当前包装机普遍通过PLC实现自动化控制,该控制方法存在兼容性差、成本高、二次开发性差等弊端[4]。因此,本文设计了基于DSP的果蔬食品包装机控制系统,从系统硬件、系统软件两个方面进行详细阐述,并通过试验分析,验证了设计系统的可行性。
2 全自动果蔬包装机分析
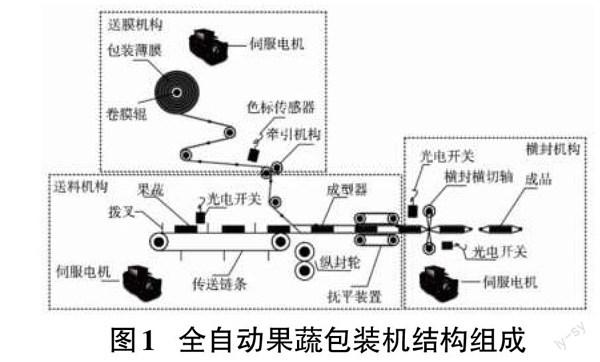
全自动果蔬包装机结构组成如图1所示,其工艺流程如图2所示。该包装机由送膜、袋成型、送料、抚平、横/纵向封合、输出等装置构成。送膜机构完成包装膜的恒速、稳定供给,主要包含导向辊、卷膜辊、牵引机构、张紧轮等;送料机构可实现果蔬精准、定向供给,避免堆积,由拨叉、张紧轮、链轮及链条组成;制袋成型器是整部包装机的重要构件,包装薄膜能够一次成型;横向封切机构可对包装膜定长横封及切断;纵向封合机构通常为辊式结构,可对包装薄膜进行拉膜及纵向封边[5]。
包装时,制袋成型器上的平面薄膜自动形成筒状袋体,实现了送料及送膜同时进行;送料机构拨叉确保了果蔬能够顺利进入筒状袋体;包装半成品通过抚平装置及拉膜牵引装置压紧;纵向封合机构进行纵向热封;横向封切机构实现切断及横向热封;完成包装的成品经输出装置送出。
包装机的横封、送料、送膜三轴同步转动,通过接近开关、色标传感器将采集的横封、送料、送膜位置传送与控制器。通过多轴同步算法实现同步运动,满足高精度、高质量包装要求[6]。
3 硬件系统设计
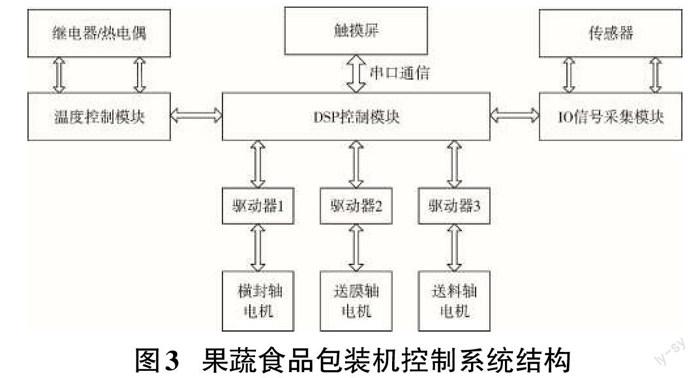
综合果蔬食品包装机工艺流程及结构,基于DSP及触摸屏设计其控制系统,如图3所示。
图3中,控制系统由温控模块、触摸屏、IO信号采集模块、DSP控制模块及伺服驱动组成。通过触摸屏可对包装参数进行设置,监控实时运行状态,实现人机交互;DSP为系统控制核心,实现控制指令生成及伺服驱动控制,完成三轴同步转动[7];温控模块控制横/纵封温度调控;IO信号采集模块采集接近开关及色标传感器信息;伺服驱动完成各轴电机运转的驱动控制。
3.1 上位机
触摸屏具有通信协议兼容性好、交互便捷、安全稳定的特点[8]。果蔬食品包装机工作环境较差,为确保包装机安全稳定运行的同时兼顾成本及性能,文中控制系统选取EVIEW MT6500T系列触摸屏。该触摸屏具有三个串口,支持RS4853及RS232通信;支持SD卡及U盘扩展存储,最大可扩展至2GB;具有RISC的32位快速处理能力[9]。由实际运行可知,文中触摸屏可操作性强,在果蔬食品包装方面的可靠性较高。
3.2 下位机
下位机作为包装机的核心部分,各轴同步转动由下位机控制完成。一方面通过接收触摸屏各种工艺参数,准确计算分析相应脉冲控制参数,进而将控制参数指令发送至各个驱动控制器,使各运动机构保持协调运动;另一方面通过编码器、接近开关及色标传感器,将三轴实际位置反馈至控制器,计算运动偏差并补偿,实现闭环控制。
文中基于DSP,综合控制要求,设计了以DSP56F807为控制器核心的多轴运动控制器[10]。控制器外围电路由通信串口模块、GPIO模块、Counter模块、PWM脉宽调制模块、CAN总线、模数转换模块及相位检测器组成。触摸屏通讯通过串口通信模块实现;GPIO模块可接收接近开关、色标传感器触发信号;伺服电机控制由Counter模块完成;PWM可控制加热设备温度;CAN总线可对信号灯及电磁阀进行控制;热电偶模拟信号由模数转换模块接收并转换为数字信号;相位检测器采集编码器信号。
4 软件设计
文中果蔬食品包装机包括上位机、下位机两部分软件设计,其人机交互界面结构如图4所示。
图4中,人机交互界面可分为操作界面、初始界面及报警界面三部分。操作界面包括手动操作选取、运动画面监控、参数设定;初始界面可选取系统语言、显示包装机信息;报警界面可实时查看历史报警及当前报警记录。
果蔬食品包装机工作时,为保证包装质量及包装效率,需确保下位机可稳定运行。一方面确定包装膜及果蔬就位,并确保横封、纵封温度符合要求。另一方面,按要求设定参数并选择相应的功能。启动后的包装机按照设定程序完成同步运动,实现送膜、送料、封切及输出成品等。包装达到预设数量后,包装机自动停止工作。具体控制流程如图5所示。
5 实验验证分析
为验证文中控制系统的有效性及可行性,基于传统果蔬食品包装机进行优化改造,并对优化后的包装机进行实验对比分析。传统包装机为异步电机、变频器、链条传动,优化时将文中控制系统替代复杂传动机构,通过伺服电机实现各轴的独立控制。优化后果蔬食品包装机如图6所示,其人机交互界面如图7所示。
包装果蔬体积为200×130×80 mm3,设定包装袋长度为300 mm,包装速度为160 袋/min,判定标准选取为包裝外观及包装效率。传统包装机包装效果与优化后包装机包装效果对比分析如表1所示。
由表1可知,优化后果蔬食品包装机每1000袋产品中,次品20袋,其中外观不良16袋,露包4袋,良品率为98%,对比传统包装机,良品率大幅提升。包装过程中,优化后包装机运行平稳,计数精准,包装效率高、良品率满足使用要求。
6 结束语
文中针对果蔬食品全自动三伺服包装机,设计了基于DSP控制器的果蔬食品包装机控制系统。综合分析果蔬食品包装机的工艺流程及基本结构,结合DSP及触摸屏研究了包括温控模块、触摸屏、IO信号采集模块、DSP控制模块及伺服驱动的控制系统硬件部分,同时开发了包括控制系统主程序及人机界面的全自动果蔬食品包装机运动控制系统软件部分。将设计控制系统应用于传统果蔬食品包装机进行实验对比分析,由试验结果可知,文中控制系统包装效率高、运行稳定,大幅提高了果蔬食品包装质量,降低了人工劳动强度,避免了果蔬的二次污染。
参考文献:
[1] 贾磊,王会军.基于DSP的果蔬包装机控制系统设计[J].包装工程,2019,40(17):194-198.
[2] 康瑞芳,刘鑫.基于DSP全自动食品包装机控制系统设计[J].控制工程,2017,24(2):336-340.
[3] 梅文娟,郑兆启,李占勇,等.生鲜食品包装机的研究[J].包装与食品机械,2021,39(1):82-88.
[4] 钱雅楠,谢箭,许癸驹.果蔬食品膨化温度智能控制[J].食品工业,2021,42(5):273-275.
[5] 苏红卫,支强.基于PLC和触摸屏的果蔬自动包装机控制系统设计[J].包装工程,2018,39(5):163-167.
[6] 高雪,袁飞.基于STM32和PLC的枕式包装机控制系统的设计[J].包装与食品机械,2019,37(3):19-23.
[7] 陈亚琳.三伺服枕式包装机控制系统设计[J].包装与食品机械,2020,38(1):61-63.
[8] 金英姬.基于PLC与触摸屏实现液压教学实验台控制系统的研究[J].实验技术与管理,2012,29(4):151-154,168.
[9] 王圣斌.自动化食品包装机械的控制系统优化设计[J].机械设计与制造,2020(11):297-300,304.
[10] 刘翔宇,赵宁.DSP56800系列开发软件包SDK使用经验点滴[J].单片机与嵌入式系统应用,2005,5(6):72-74.
【通联编辑:谢媛媛】
收稿日期:2022-05-15
作者简介:林敏(1987—) ,女,广东梅州人,讲师,学士,研究方向为计算机应用。
