为飞行器赋予人类智慧
2022-05-30杜月娇
杜月娇

说起无人机,很多人的第一印象就是其拍摄的那些让人惊叹的航拍照片或视频摄像。近年来,无人机已从最初的军事应用扩展到城市环境中的各种任务。利用无人机收发快递;应用无人机进行治安维护、疫情检测、空中客运……未来更多新技术的推广可能给这些领域发展带来革命性突破。与此同时,加大开放低空空域的力度、发展以无人机为代表的通用航空产业,对社会、经济的发展也具有积极意义。在这一背景下,如何让无人机等飞行器变得更加智能,安全高效完成复杂任务,将对相关产业发展起到关键性作用。
“我们现在所做的工作就是为飞行器赋予人类的智慧,让它学会像人一样去思考、解决问题。”重庆大学航空航天学院副教授吴宇说。面向国家之所需,提高飞行器的自主飞行能力,吴宇多年来在飞行器智能控制、规划与决策研究中笃行不辍,研究对象涉及无人机、高超声速飞行器、多模式运动飞行器等。他深信,通过为飞行器赋“智”,必将会大大提高未来社会各领域的运行效率,打造出一幅新的社会图景。
飞行器设计
——从懵懂到热爱
在空中翱翔是一种梦想,是一种情怀,是人类不安于现状的最好证明。很早以前,在天空中飞行被认为是一项不可能完成的任务,但随着人们想象力的提升和科学技术的进步,这一切都慢慢成为现实。无人飞行器的出现,更是将科技推向了一个新的阶段。
在上大学之前,吴宇对这一领域的了解并不多。学理科出身的他,原本的目标就是学习与工程相关的专业。在吴宇从小的认知中,和飞机相关的专业都十分“高大上”。“那时候我就在想是不是学了飞机设计,关于地面车辆及一些其他机械设备的设计就都能搞定了。”他说。就这样,吴宇于2007年9月进入南京航空航天大学飞行器设计与工程专业学习。大学4年,他在这一领域打下了扎实的专业基础。随后他又成功考入北京航空航天大学航空科学与工程学院,师从飞行动力学与控制领域知名专家屈香菊教授,继续飞行器设计专业的硕博连读。
在屈香菊教授的指导下,吴宇对飞行器任务规划这一课题的兴趣愈加浓厚,并学会了在科学研究中如何将复杂的工程问题进行拆分、简化,并一步步入手解决其中的关键科学问题。“屈老师严谨的学术态度与传授的学术论文写作方法使我受益终身,为我工作后在飞行器智能控制与决策领域独立开展科学研究打下了坚实的基础。”吴宇说道。
深耕多年
——飞行器智能控制成果颇丰
为适应国家和西南地区航空航天事业的发展需求,重庆大学于2013年12月26日正式成立航空航天学院。作为土生土长的重庆人,同时也是航空航天领域的科研工作者,2016年9月,吴宇决定回到故乡,继续自己在飞行器控制、规划与决策领域的科研建设与探索。
在刚参加工作时,吴宇以博士期间与屈香菊教授团队合作的课题资源为基础,更加深入研究不同类型飞行器的轨迹优化问题,并且关注多源信息融合与多模式飞行等前沿热点。“不能局限于学术研究与发表论文,研究要与国家重大发展战略相结合才能体现其价值”。秉承这一理念,吴宇开始关注各种项目指南,在2017年申请到了领域基金项目,又将自己的研究对象延伸到了跨介质飞行器。“随着空-海一体化的建设思路,我们希望有能够同时具备空中飞行与水下潜行能力的载运工具。”吴宇说。
为了能够打开自己的科研视野,将研究水平上升到更高的台阶,2019年,吴宇申请前往新加坡南洋理工大学机械与宇航学院进行博士后工作。正是在这个时期,他在飞行器智能控制领域的研究有了质的飞跃。在他的研究经历中,基于智能优化理论设计各种任务场景下的飞行器任务规划与决策算法是一条主线。然而,设计这类算法求解规划与决策问题的优势体现在何处?怎样针对性地改进这类算法以提高其解决具体问题的性能?如何根据飞行器航迹规划问题的特点选择最合适的算法进行求解?这一系列的问题,其实早已困扰吴宇很久,当时也没有相关文献对此进行深入探究。
带着以上疑惑,吴宇基于领域内普遍达成的共识,阐述了自己对上述热点问题的见解,以独立作者的身份在智能计算国际期刊《群与进化计算》(Swarm and Evolutionary Computation)发表了综述论文。
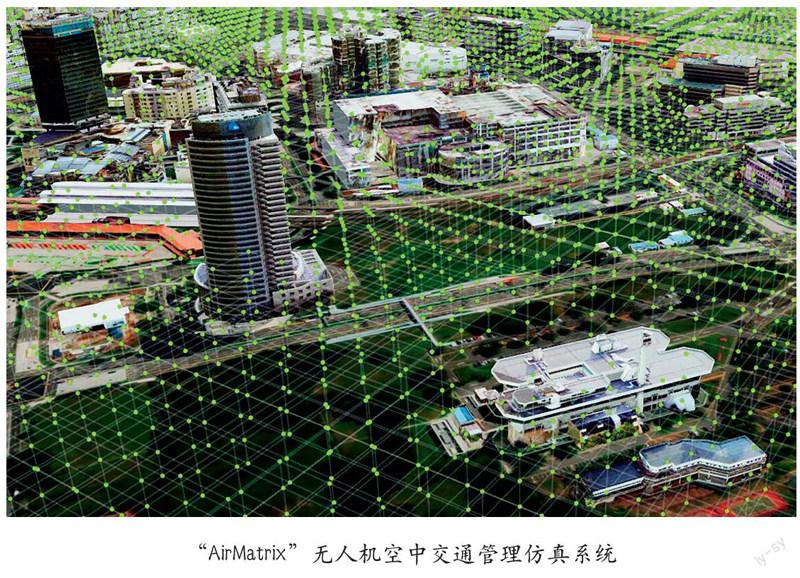
在南洋理工大学,吴宇加入了空中交通管理研究所(Air Traffic Management Research Institute)。這个研究所由新加坡民航局出资和南洋理工大学合作开设,并聘请了航空界全球顶级的专家对项目实施的全过程进行监督。在这里,吴宇和研究团队成员们针对无人机空中交通管理问题开展研究,研究也同时获得了国家自然科学基金的资助。考虑到未来会有越来越多的用户申请使用无人机,由于低空空域容量有限,如果不加以限制,则会造成冲突。因此,针对无人机的不同运行模式,以及离线与在线两种情况,吴宇及其团队设计了多用户冲突解决策略,生成了无人机飞行方案,提高了无人机工作安全与效率,为无人机空中交通管理系统的开发提供了理论依据与技术支撑。
志存高远
——脚踏实地的科研逐梦路
2021年9月,吴宇回到重庆大学,继续他的教学科研工作。此时,他也从初出茅庐的学术新秀逐渐成长为在领域小有名气的专家。学术期刊约稿、客座主编邀请、优秀审稿人等称号接踵而至。行业内多个研究院所主动向他寻求项目合作、邀请他担任特聘专家等,都是对他长期以来在飞行器智能控制与决策领域研究取得成绩的认可。
迄今为止,吴宇已经在国内外学术期刊会议上发表论文60余篇,其中以第一/通讯作者发表《科学索引扩展版》(SCIE)论文34篇,主持各类科研项目十余项。因其在相关领域做出的突出科研成果,吴宇于2021年成功入围“斯坦福全球前2%顶尖科学家”榜单。荣誉的获得,对于吴宇来说是莫大的鼓励,但他明白现在远不是停下来的时候,未来还有更多更值得研究的问题等着去解决。面向未来,吴宇认为:“无人机集群的应用是这一领域的大势所趋。除此之外,无人机与其他载运工具之间的协同与平台构建,也是重要发展方向之一。”吴宇说。现如今,他正在基于深度强化学习理论探索无人机集群智能博弈与无人系统设计方法,一切工作都在有序进行中。
不积跬步无以至千里。作为一名青年教师,吴宇深知自己在科研之路上还需要不断地锤炼与积累。近些年来,他正在逐步与国内相关领域团队建立稳定的合作关系,随着今后5年或者10年的科研历练,他希望能够联合多团队力量,共同承担一些国家战略层面的科研项目,以此来发展与巩固他们在飞行器控制、规划与决策领域的研究成果,逐步将团队打造为国家发展无人机产业的中坚科研力量。
(责编:张闻)