中职工业机器人激光雕刻教学工作站的设计与意义
2022-05-30李龙平
李龙平

一、前言
随着国家“人口红利”的不断下降,工业机器人的进一步普及。社会对于工业机器人行业人才的需求越来越大,并且已经表露出不简单满足于基本操作的人才趋势,更加强调人才的学习和创新能力。作为中职学校的工业机器人技术应用专业,必须对这一趋势进行跟进,通过实践探索出更加适合社会需求的人才培养方案。只有通过不断的实践与理论相结合,才能有新的教学思维火花产生。工业机器人技术实用性很强,实践教学环节能帮助学生理解课程基础知识、培养实践能力、激发创新精神,是提高教学质量重要且有效的手段(冯凌云,刘凯,2021)。笔者在教学的实践过程中发现,中职学生对于工业机器人实践教学表现出非常大的热情,但存在着大多数学生无法深入学习的情况,除了与学生本身的知识储备不足,也与学校的教学设备存在一定关系。
中职工业机器人实训教学设备,需紧贴市场需求,同时也需要具备简单易用,兼备入门和提升等教学功能。激光雕刻在工业上应用广泛,在教学中也容易加工出实用、有趣的作品,ABB工业机器人的仿真软件RobotStudio兼容第三方3D模型,能够调动学生的学习兴趣,激发学生动手创新能力。因此,探索工业机器人激光雕刻教学工作站的设计与论证,无论在工业市场需求还是教学上,都具有很好的现实意义。
二、知识准备
市面上许多种类的工业机器人教学工作站,虽然不具备生产功能,但是能够以非常接近企业生产的方式呈现出来,方便教学。同时各工作站均包含工业机器人技术、PLC技术应用和机电一体化技术等知识内容,属于一个集成度较高的自动化教学设备。此次在对工业机器人激光雕刻教学工作站进行设计和论证,所需要的工业机器人技术、PLC技术应用以及三维设计等基础知识较多。
1.SolidWorks三维设计软件
SolidWorks设计软件是一款实用的三维机械设计软件,能够使初学者快速上手,设计出自己想要的3D模型,并且支持将设计出来的模型转化成主流设计软件所兼容的格式。
2.RobotStudio仿真软件
RobotStudio是瑞士ABB公司设计的给予ABB工业机器人配套使用的仿真软件,方便使用者进行工作站建立、布局系统、建立工具坐标和工件坐标等全功能工作站建立的仿真软件。使用简单,容易上手,方便展开教学,能有效解决由于设备不足而造成的教学困难。
3.PLC技术应用
在工业应用中,与工业机器人、CAD/CAM并称工业自动化三大支柱的PLC作用越来越重要,尤其是在工业机器人同外界的数据交换中,PLC起着至关重要的作用。并且以其低成本、使用范围广和稳定的性能等优良特点使得它在工业上占据着重要的地位。
4.激光雕刻技术
此次采用的激光模组为创联科技的7W定焦蓝光模组,激光波长为450nm,焦距18mm;采用12V直流电源进行供电,并且采用PWM信号进行功率控制,可以通过调节占空比和出光频率对激光模组进行功率调节。可以对木头、皮革、塑料、铝合金和不锈钢等材质的工件进行雕刻。具有低噪音、散热好、精度高等特点,能够满足精度0.5mm以上的激光雕刻。
三、设计思路
1.工作站建模
虚拟制造业协同创新过程中,也需要重视设计、制造、集成等综合性全生命周期虚拟制造业无界生态链的建设(雍玖,王阳萍,党建武,2021)。为了较好地进行工业机器人激光雕刻工作站的设计,采用了建模、虚拟仿真、实体机验证的设计流程。
首先,根据测量得到的创联科技激光模组、待加工用的纪念品木块尺寸,利用SolidWorks软件进行1∶1,并且根据需要设计出可以安装在ABB 1200型工业机器人末端的配套夹具。然后将模型导入到已经设置好工作站的 RobotStudio 仿真软件当中,进行工具坐标和工件坐标的建立。随后,对建立起来的虚拟激光雕刻工作站进行程序的编写并且完成仿真测试。
2.电路设计
本次设置使用的激光模组采用DC 12V的电源进行供电,采用PWM信号的方式进行驱动,控制频率在100Hz以内,符合此次生产要求;PWM模块采用频率和占空比可调的方波发生器,频率控制在0-150KHz 之间。初步方案是通过机器人控制器 IRC5 输出数字信号 DO1,控制12V机械式直流继电器进行PWM发生器的通断,从而控制激光模组的出光时间。但在实际生产和教学时,机器人信号的输出频率超出机械继电器的使用频率,出现通断的延时,不能及时很好地控制激光模组的出光时间,造成被加工工件和继电器的损坏。
为了有效解决激光模组接收PWM信号的问题,在通过重新设计电路方案和实践后,确定电路如图1所示。引入西门子smart-200系列PLCSR40替代原有的机械继电器,SR40属于继电器输出型PLC,具有三路高速脈冲输出,可以输出频率在100KHz以内的脉冲信号,符合激光模组的控制要求。主要控制流程为:PWM发生器根据产品要求设置好频率参数后,一直给激光器提供信号,机器人控制器IRC5通过输出信号DO1给 PLC,控制信号是否能传送到激光模组。其中,PLC程序起着信号取反的功能,并且预留了足够的 I/O端口,方便工作站日后的升级和改造。
3.程序设计
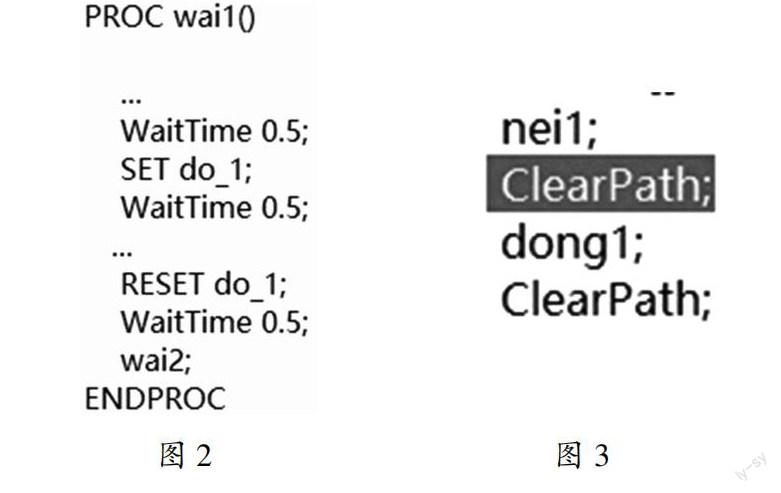
工业机器人激光雕刻工作站是实现对工件的加工,加工出客户想要的图案和文字,要求机器人运动到指定的工作位置后,再开启激光进行加工,加工完成后再关闭激光。涉及信号的频繁导通和断开。因此,在设计程序的时候需要采用程序调用和等待指令(如图2所示),进入被调用程序后,进行 0.5秒的等待后,再利用置位指令从DO1端口输出信号给PLC,以此来控制激光模组的出光,在等待又一个 0.5秒后,再进行程序的调用运行轨迹图案;完成一条轮廓后再对出光信号进行复位,避免激光烧坏工件。由于图案较为复杂,编写的程序的量足够大,在运行时容易出现堆栈溢出导致机器人停止工作,所以当程序量足够大的时候,需要使用特定指令ClearPath进行清理(如图3所示)。ClearPath能够有效地解决由于程序过多而导致的堆栈溢出问题。
四、现实意义
1.有利于解决部分学校教学设备不足而教学难以开展的问题
工业机器人RobotStudio仿真软件能够有效构建虚拟三维实训场景, 模拟真实场景,有利于学生提前熟悉实际操作的环境与内容(夏中坚,2021)。笔者所在学校有ABB工业机器人2台,在进行工业机器人教学时很难开展充分的实践教学。为了有效激发学生学习兴趣,开展行之有效的实践教学,笔者曾利用Robotstudio仿真軟件对学校的教学设备进行1∶1建模,采用“理虚实”的教学模式进行教学,极大地激发了学生的学习兴趣,促进了教学实践的效果,教学效果优良。同时,仿真教学也具有更高的安全性。
2.虚实结合,有利于激发学生学习和创造能力
职业学校的教学设备大多数是通过向企业定制使用的,较为刻板,学生们未曾见到过一台设备或一条生产线从无到有的过程,所以还是未能很好地调动积极性。此次进行工业机器人激光雕刻教学工作站的设计与论证,学生能够在SolidWorks三维设计软件上设计、ABB工业机器人仿真软件Robotstudio上论证,协助老师进行工作站的安装和调试。这是一个很好的教学过程,能够充分激励学生,激发学生学习的动力,提升专业认同感。同时,该工作室采用模块化设计,拆卸、拼装简单,有利于长期的教育教学开展。
3.促进专业教师专业能力提升
工业设备和教学设备的设计与论证,是教师专业能力的体现。工业设备和教学设备的制造,要从理论到实际的迁移,理论与实际相结合总是存在着实践的困难,只有深入去应用理论知识解决实践中的困难,才能更好地促进教师专业能力的提升。此次设计的激光雕刻工作站虽然在硬件上涉及的元件不多,但是涉及3D建模、ABB 工业机器人的使用、RobotStudio仿真软件的使用、激光模组、PLC技术应用以及PWM等知识,综合程度比较强,对教师来说是一次非常不错的锻炼。
4.促进工业机器人1+X 证书的课证融通
在工业机器人激光雕刻工作站的教学中,涉及工业机器人的基本操作、工具坐标和工件坐标的设置,I/O 信号以及PLC技术应用等多个知识点,符合当前教育部所公布的多个工业机器人1+X证书的职业等级标准,如工业机器人应用和工业机器人运维等职业等级标准。以激光雕刻工作站作为知识的载体,学生根据自己的意愿生产出产品,学习效果可通过产品看得到,能够激发学生进一步的学习欲望,夯实学习成果。
五、结语
随着职业教育的快速发展,中等职业学校的教学设备更新速度加快,只有把握住市场的需求,设置行之有效的教学过程,才能更好地为国家和社会培养更多合适的人才,促进职业教育的发展。激光雕刻属于市场中较为新兴的技术,应用已经极为广泛,学生乃至专业教师虽然知道应用的原理,却还是很陌生。因此工业机器人激光雕刻工作站的设计,或者说每一次的教学载体的设计与论证,都在一定程度上加速了教师专业能力的成长和产教融合成果的产出,促进着教育教学的良性发展。
责任编辑 何丽华
