GeoSlam在非暴露空间测量中的应用
2022-05-30王博奇
王博奇
(山西地科勘察有限公司,山西 太原 030001)
1 引言
三维激光扫描技术又被称为实景复制技术,是一种全新的测量技术,它突破了传统的单点测量方法,具有高效率、高精度的独特优势,三维激光扫描技术能够提供扫描物体表面的三维点云数据,因此可以用于获取高精度高分辨率的数字模型。
SLAM三维激光扫描系统,最大的用途是可以进行实时移动式的测量,快速进行采空区的数据采集,其主要是依靠SLAM算法。SLAM三维激光扫描系统写由:激光扫描仪(Laser Scanne)、惯性测量单元(metal. measurement umt,简称MU)与SLAM算法( simultaneous localization and mapping)三个主要要素组成。SLAM算法是这三大主要要素中最重要的,SLAM算法的好坏决定了解算出的移动轨迹的精准度,移动轨迹的精准度决定了空间场景三维数据的精准度。SLAM算法根据激光测距仪所获得三维数据中时间轴上共同的特征点加上IMU获取的姿态数据,进行实时解算设备从出发点移动的距离,角度信息,逆向的构建连续的空间场景数据。即被动式依据当前周围场景的数据实时计算出连续的空间数据。
2 SLAM技术概述
Simultaneous Localization and Mapping,即时定位与地图构建。 SLAM问题可以描述为:机器人在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现机器人的自主定位和导航。
2.1 视觉SLAM与激光SLAM
视觉SLAM-VisualSLAM,也称为VSLAM,在映射环境的同时,仅使用来自摄影机的视觉输入,计算设备相对于其周围环境的位置和方向。 基于特征的视觉SLAM通常通过连续的摄影机帧跟踪感兴趣的点,以三角化摄影机的三维位置,然后使用此信息构建三维地图。激光SLAM,基于激光雷达的SLAM系统使用激光传感器生成其环境的3D地图。激光雷达(光探测和测距)通过使用主动激光“脉冲”照亮物体,测量到物体(例如,墙壁或椅子腿)的距离。激光雷达是一种既快速又精确的方法,可用于各种环境和条件。由该方法生成的激光传感器点云具有很高的精度,非常适合在施工中进行测绘。这些高精度的距离测量也可用于许多其他应用。目前,SLAM技术被广泛运用于机器人、无人机、无人驾驶、AR、VR等领域,依靠传感器可实现机器的自主定位、建图、路径规划等功能。
3 实际案例
此次在某矿山测量我们采用了目前最可靠的激光SLAM(参见图1),GeoSLAM公司的ZEBHORIZON。该矿山采用竖井、斜井、斜坡道联合开拓方式的采矿方法,井下巷道总长约20公里左右,共布设导线点50个,这种复杂地形对于SLAM的算法有很大的考验,也是SLAM技术将来市场应用的典型作业场景。

图1 激光SLAM
3.1 GeoSLAM的技术优势:
(1)体积小,重量轻,仅重3.5kg ,手持式GEOSLAM 可在多种复杂环境下快速部署并进行工作。(2)无需 GPS 与繁琐操控,一键式运行。(3)单人作业,无需传统测量方式两人一组,费时费力。(4)改变传统测量方式,采集所有现场数据,使数据成果有可追溯性。(5)采集数据,可生成多样化成果,一次采集,可适用于多次分析。(6)测量精度高,数据更准确,将现场搬回办公室,对任意位置进行量测。(7)质检更方便,原始数据进行留存,随时作为检验依据。
3.2 项目实施流程:
3.2.1 准备工作与矿道路线规划
此次铁矿测量我们采用GeoSLAM公司的ZEBHORIZON手持三维激光扫描仪采集数据; RTK、全站仪做控制测量;内业采用GeoSLAM HUB软件处理原始数据,和CAD软件出图的作业方式。根据实际情况提前规划行走路线。
3.2.2 控制测量
控制测量采用RTK、全站仪结合的方式。硐外RTK做控制点,硐内全站仪做控制,最后闭合检验精度。本硐扫描里程5204.427 m,控制点数据参见表1:
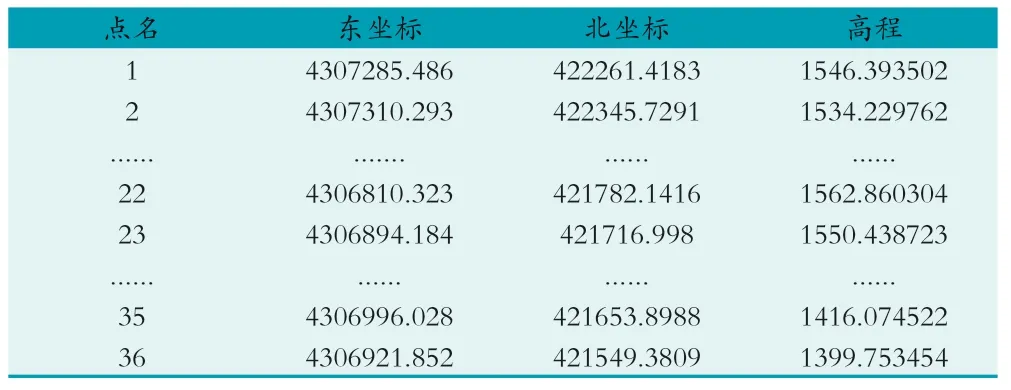
表1 本硐控制点坐标
3.2.3 三维扫描
由于矿道比较长,现场会有一些分叉。我们采用分段扫描的方式,各部分扫描时保证30米左右的重叠,后期对点云数据进行拼接,各个部分进行闭合扫描进一步提高精度。而 GeoSLAM公司的ZEBHORIZON手持三维激光扫描仪,结合了SLAM算法和惯导技术,可实现移动式扫描,采集效率高,优秀的算法保证了可靠的精度。仪器工作的时间越长惯导的误差也会逐渐变大,所以我们将扫描时间控制在每段20分钟以内。在控制点上开机,开始扫描后稳定放置10秒钟系统会自动记录作为控制点,然后拿起设备开始扫描,依次进入需要扫描的空间,到下个控制点稳定放置10秒钟系统会自动记录作为第二个控制点,依次扫描完各个空间,回到起始控制点进行闭合(挂控制点至少需要三个)。
3.2.4 数据处理
将原始数据拷贝到电脑端利用GeoSLAM Hub软件进行数据解算,进行内复核精度对比(参见表2),将得出的点云数据(参见图2)进行投影生成平面图,对任意面截取剖面,以及采空区三维量测分析:实现对任意点坐标,两点距离、面积、体积的量测。
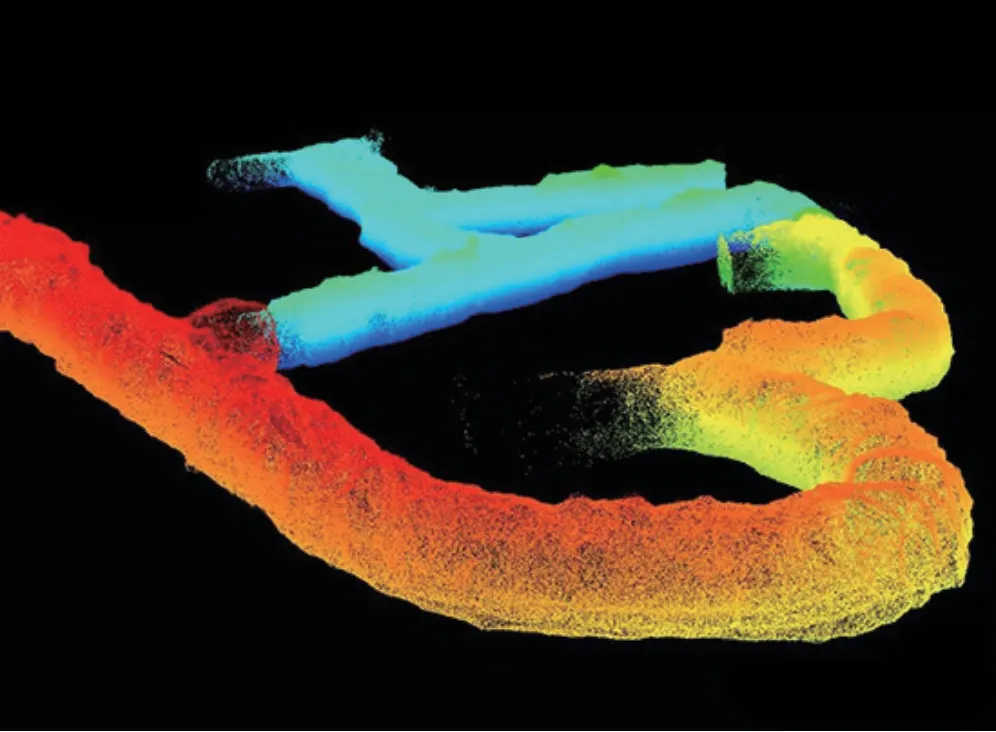
图2 点云数据

表2 内复核精度数据对比
4 结束语
井下测量是指导井下矿业生产的重点工作,测量工作准确与否直接影响到工程质量、施工进度和人员安全。测量失误会给矿业生产带来重大损失,选用先进的测量方法才能确保安全和质量。
随着SLAM移动式三维激光扫描技术的普及,越来越多的人已经体会到它相较于传统测量仪器之间的天然优势。SLAM移动式三维激光扫描技术利用自动生成的立体点云,全方位对堆积物结构的各个方位进行精确测量,再通过点云数据进行后期处理得到我们想要的数据。这种作业方式不仅节约了时间,提高了作业效率,也大大减少了人力、物力的投入,更为重要的是,计算的精度也很大程度上得到了保证。
目前,三维激光扫描仪很多种选择,而针对这种井下封闭空间距离长、空间大,手持式扫描仪作业方式灵活,仅用一人就可以完成外业扫描工作,作业时间可控,前期也可以进行扫描作业的整体规划。这样,使用GeoSLAM-horizon来完成井下矿道采掘面、采空区具备了充分的可行性。
本项目通过利用GEO-SLAM矿产巷道扫描作业,利用手持三维激光扫描技术,结合三维虚拟现实技术,在短时间之内完成了对狭窄的巷道扫描和局部区域的三维数据提取工作,并为后续矿山的开采和修复等工作提供了真实可靠的数据依据。