空间遥感仪器电箱结构设计与分析
2022-05-30刘衍峰高志良孙振亚
赵 越 张 达* 刘衍峰 高志良 孙振亚
(中国科学院长春光学精密机械与物理研究所,吉林 长春 130033)
空间遥感仪器在航天科技中发挥着举足轻重的作用,而空间遥感仪器的电箱是遥感仪器的电子大脑,具备信号的控制处理、数据传输及设备供电等功能,其性能的好坏直接影响着遥感器性能的好坏,这就要求空间遥感器要能适应复杂的空间环境[1-2]。空间遥感器电箱结构首要任务是能为电子学提供稳固的结构支撑和固定,其次要能够承受住发射阶段的振动和冲击,同时具备合理的导热设计和电磁兼容设计要求[3-4]。因此,需要空间遥感仪器电箱结构具备足够的力学稳定性、合理的导热散热能力和优异的电磁兼容性能。
本文以一种空间遥感仪器电箱结构设计为例,采用三维建模软件建立电箱三维实体模型,使用有限元软件和有限元理论对电箱结构进行有限元仿真分析。根据分析结果验证设计的合理性,并为后续进一步实验验证提供了理论指导和依据。
1 电箱结构设计
1.1 电路板布局
常用的电箱的电路板布局形式有背板式布局和串接式布局。该电箱的电路板数量较多,且板间通讯线路多,从电子学更容易实现的角度考虑,采用背板式布局形式。电子学按照不同的功能进行模块化设计,每片电路板独立实现一种功能,通过连接器插接在底台板上,利用底台板实现板间通讯[5]。电路板的详细布局形式如图1 所示。
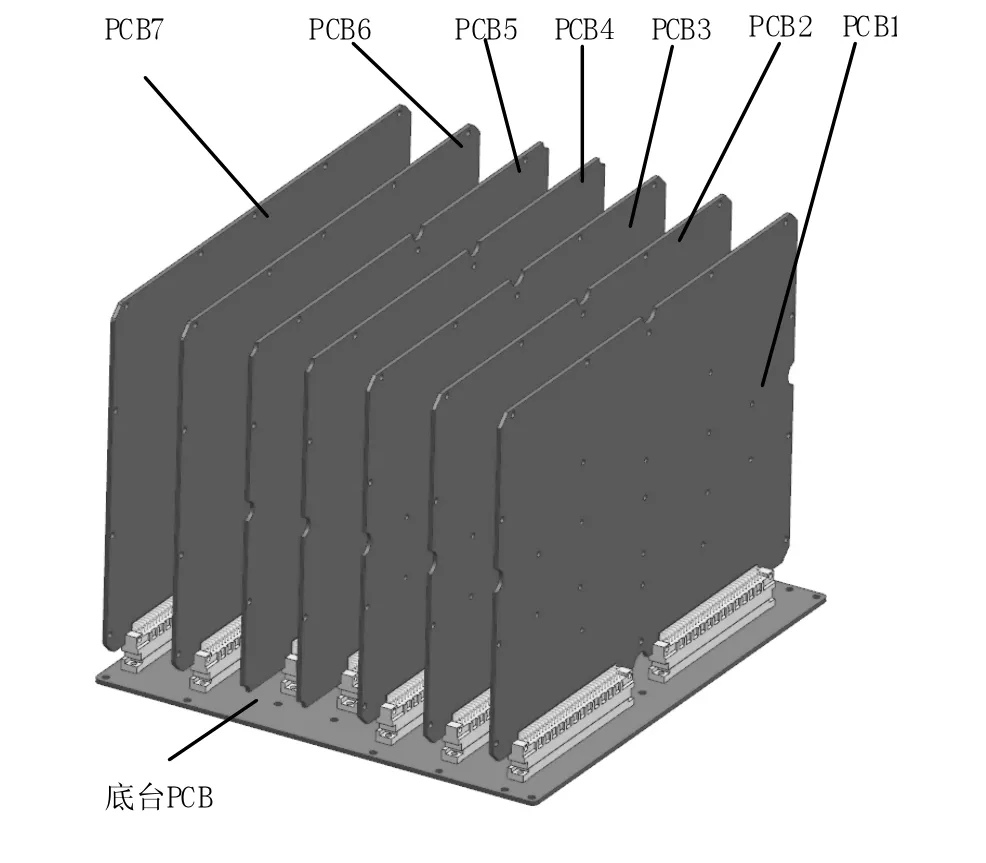
图1 电路板布局示意图
1.2 电箱结构设计
电箱的结构不仅要对电路板起到稳定支撑的作用,而且还需要电箱要具有良好的导热散热能力和电磁屏蔽性能,这就对电箱材料提出了很高的要求。
常见的空间遥感器电箱材料有钛合金、铝合金和镁合金,三种材料的详细参数如表1 所示。综合三种材料的性能,镁合金密度最小,具有较高比刚度,导热性能和热稳定性更好,镁合金还具有优良的导电性能和电磁屏蔽性能[6],本例中的电箱及电路板框也采用镁合金材料。

表1 常见空间遥感器电箱材料参数表
根据电路板的布局进行电箱的结构设计,电箱的整体结构采用箱板拼接式设计,如图2 所示。拼接式箱体结构由底台板框、左右箱板、前箱板、后箱板和上箱板组成。底台板安装固定在底台板框上,左右板框内壁设置有导槽。电箱内部其他电路板具有独立的板框支撑,为了保证部分电路板对电磁屏蔽的更高要求,所有电路板均设置了板框盖板。对于大功耗的元器件板框相应位置也设置了导热面[7]。板框侧壁设置导轨,与左右板框内壁上的导槽相配合。考虑到整个电箱的电磁屏蔽性能,所有最外层箱板均保证了最小3mm 的厚度。六块箱板通过螺钉紧固连接,箱板连接处设置止口,可以形成稳固的电箱结构,内部的七个电路板板框通过导轨插入左右板框对应位置的导槽内,电路板和板框也加强了整个电箱的结构强度与刚度。
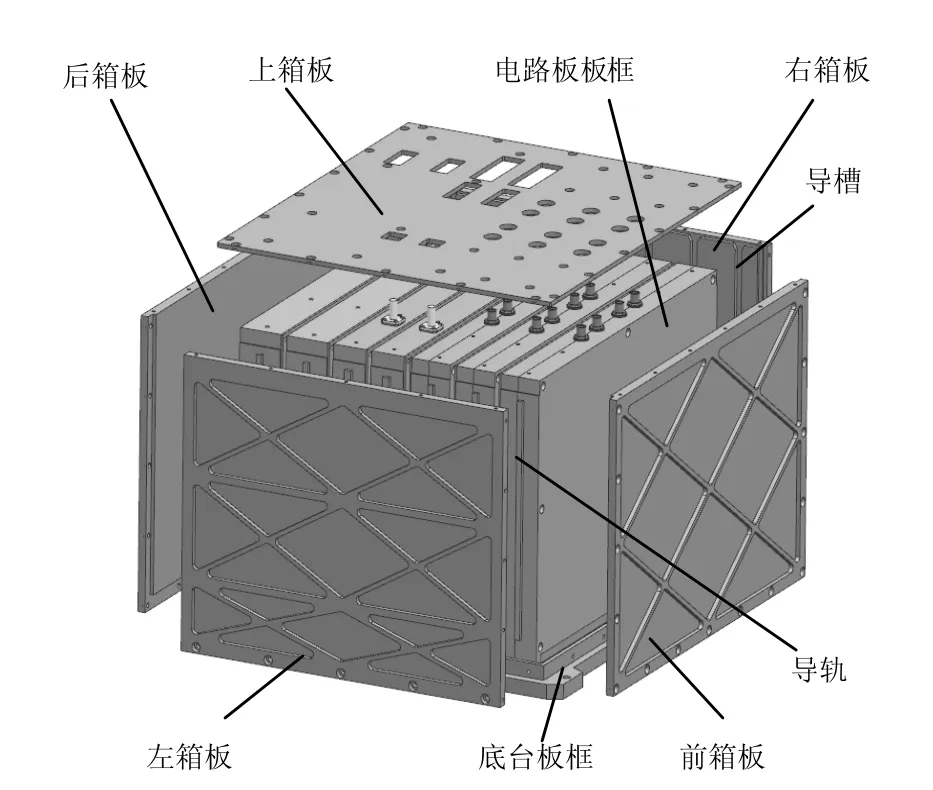
图2 电箱结构示意图
2 模态分析
模态分析的目的是考察电箱结构动力学响应特性,是为了求解系统的固有频率及模态振型,检验电箱能否经受整个发射过程的振动考验,也是产品加工前的重要仿真复核过程。
为提高计算效率,在保证数值仿真计算精度的前提下,对电箱零部件进行结构简化处理。模型中对箱板和板框进行了详细网格划分,将电路板、电子元器件等设置为质量点。外部箱板斜筋较多形状复杂,采用4 面体网格划分;内部板框形状规则,采用六面体网格划分;螺钉连接处用RBE2 单元建立连接。电箱有限元模型如图3 所示。
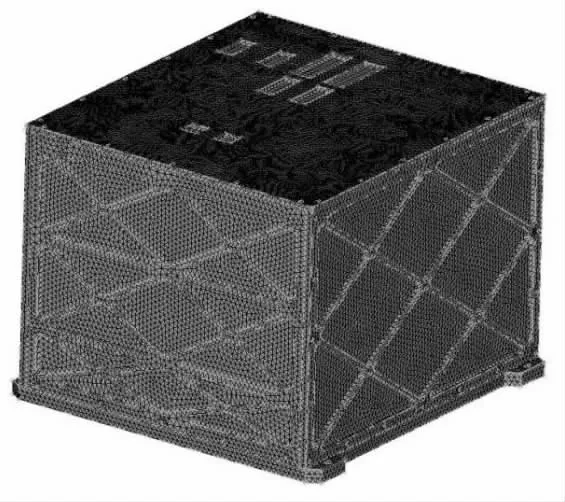
图3 电箱有限元模型
利用MSC.Nastran 软件,基于Lanczos 法进行模态分析求解电箱0~1000Hz 的模态,根据仿真分析结果显示:电箱整体模态的第一阶固有频率为578Hz,振型主要表现为电箱沿Z 轴方向的振动,图4 为一阶整体模态振型。
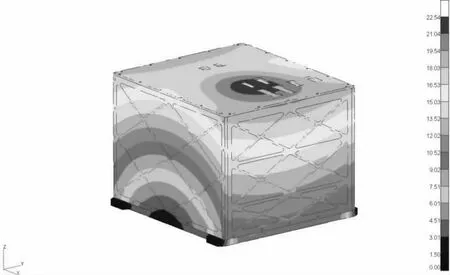
图4 一阶整体模态振型
继续考察模态分析的结果,当频率在299Hz~577Hz之间,出现多个低阶的局部模态,这些低阶模态大都表现为板框盖板的局部单方向振动,而处于此范围的低阶模态时,板框及箱体主体结构并未产生明显振型。如图5所示,以299Hz 频率处的低阶局部模态为例进行说明,该模态下的振型表现为第1、2、3 块电路板板框盖板沿Y轴局部振动,在该低阶局部模态下不会造成电箱主体结构的明显变形。

图5 在299Hz 处的低阶局部模态振型
综合模态分析的结果可以看出,电箱的一阶整体模态固有频率为578Hz,对于一般的遥感载荷,一阶固有频率大于120Hz 就能够有效避开发射阶段易共振的频率段,电箱结构和电子学元器件就能够承受发射阶段的振动,证明了本次电箱结构设计具有较高的刚度裕度。
3 线性静力学分析
线性静力学分析的目的是为了检验系统的力学稳定性,求解线性静力学载荷下的的响应。由于空间遥感仪器工作环境的特殊性,在随火箭发射阶段要承受加速度载荷的力学环境。因此,对于空间遥感仪器的线性静力学分析,主要是分析结构在过载情况下的响应情况。
本文根据力学指标要求,在MSC.Nastran 软件中对电箱沿X、Y、Z 三个方向分别施加不同大小的加速度载荷,仿真分析电箱在各载荷状态下的力学响应,求解电箱最大变形位移和最大应力。电箱工况及分析结果如表2 所示。

表2 加速度载荷下的分析结果
表2 的分析结果表明,当沿Y 轴方向施加6g 加速度载荷时,电箱变形位移最大为28.5μm,此时最大应力为3.22Mpa,因为沿Y 轴方向是垂直于电路板的方向,所以沿Y 轴方向电路板和电路板板框强度和刚度最弱,该工况下变形位移量最大。而当沿Z 轴方向施加15g 加速度载荷时,电箱的最大应力出现最大值8.13Mpa,此时的最大位移为22.6μm,因为在该工况下加速度载荷最大,所以应力值较大。此外,沿Z 轴的电箱强度和刚度要优于Y 轴方向,所以即使Z 轴方向加速度载荷增大,但最大位移并没有超过Y 轴方向施加载荷的情况。三种工况下的最大应力均小于镁合金的材料屈服应力215Mpa,变形位移量也都较小,不会对电路板组件产生破坏。
综合电箱线性静力学分析的结果,在设计空间遥感仪器电箱结构时,要充分考虑结构力学性能在不同方向下的差异性,力学性能薄弱的方向应该尽量避开最大加速度载荷方向,从而提高电箱力学适应性。而本例中电箱力学性能薄弱的Y 轴方向避开了最大加速度载荷方向,且三种工况下最大位移和最大应力均在合理范围内,证明了电箱结构设计的合理性。
4 10℃温度场工况分析
载荷在空间中处于变化的温度环境中,需要考察电箱均匀温变载荷的承受能力,根据指标要求,分析电箱在10℃温度场工况下的热应力和热变形。
10℃温度场工况的环境初始温度为20℃,均匀升温至30℃。在MSC.Nastran 软件中设置温度场,并仿真求解该工况下电箱的最大变形量和最大热应力。图6 为电箱在10℃温度场工况下的热变形和热应力云图。

图6 电箱在10℃温度场工况下的热变形和热应力云图
通过图6 所示,在10℃温度场工况下,最大变形为49μm,出现在上箱板边缘位置,量级较小;最大热应力为60.3Mpa,出现在右侧箱板与底台板框一处螺孔连接位置,该应力值没有超过镁合金的屈服应力215Mpa,不会对电箱结构造成破坏。综合热应力和热变形结果,最大热应力和热变形均出现在箱板结构位置,对电路板内部的影响较小,但是空间载荷依然要充分考虑温度载荷的影响,考虑必要的温控措施。
5 结论
电箱是空间载荷的重要组件,电箱的性能直接影响载荷是否能正常工作,所以在设计阶段,通过有限元分析的方法对电箱进行仿真分析,并根据仿真结构进行迭代优化具有重要意义,是生产前的重要理论保证。通过对电箱的模态分析、线性静力学分析和10℃温度场工况的仿真分析。结果表明,电箱的一阶固有频率为578Hz,远高于指标规定的120Hz;在给定的加速度载荷下,最大变形位移为28.5,最大应力为8.13,不会对电路板组件产生破坏;在10℃温度场工况下,最大热变形为49μm,最大热应力为60.3Mpa,也不会对电箱结构造成破坏。证明了设计的合理性,电箱结构具有足够的力学稳定性和热尺寸稳定性,为后续进一步实验验证提供了理论指导和依据。
