基于图像深度学习的高压断路器操动机构锈蚀状态评估
2022-05-30杨鼎革赵陈琛郭艺博张国钢
杨鼎革,丁 彬,高 健,牛 博,赵陈琛,郭艺博,张国钢
(1. 国网陕西省电力公司电力科学研究院,陕西 西安 710100; 2. 西安交通大学电力设备电气绝缘国家重点实验室,陕西 西安 710049)
1 引言
高压断路器作为电力系统的关键保护设备,在系统发生故障时,迅速切断故障部分以保障整个电网的正常运行,其可靠性影响电力系统的稳定运行。高压断路器常见故障中操动机构相关的缺陷约占50%,是设备运维的重点[1]。操动机构受到环境侵蚀,在电磁铁铁心、传动部件轴销等位置会产生锈蚀,据统计锈蚀及异物缺陷约占2%~5%,严重锈蚀时,将导致分合闸弹簧无法充分释能、机构动作卡涩、分合闸速度降低甚至拒动等严重事故[2-5]。因此,准确评估高压断路器操动机构的锈蚀状态,并及时采取相应的处理措施,对保障电力系统供电安全性具有重要的意义。
近年来,国内外研究人员主要针对高压断路器的动作过程进行监测,以分合闸线圈电流波形、分合闸行程曲线以及振动信号等作为对象,结合机器学习算法对高压断路器状态评估展开了大量研究。文献[6-8]基于分合闸线圈电流曲线,分别采用自适应神经模糊推理、皮尔森相关系数特征量优化方法、聚类和自组织映射神经网络混合算法对断路器操动机构进行状态评估。文献[9]提出一种基于短时能熵比与动态时间规整算法,文献[10]提出一种基于局域均值分解能量熵和支持向量数据描述的高压断路器机械状态监测方法。文献[11,12]采用多种特征信号融合的方式评估高压断路器的整体工作状态。目前,对于高压断路器操动机构锈蚀缺陷的评估尚缺乏研究。
通过图像检测,识别操动机构锈蚀状态,属于典型的目标检测问题。目前,目标检测通常采取深度学习方法,如区域卷积神经网络(Region-Convolutional Neural Network, R-CNN)、Faster R-CNN网络、区域全卷积神经网络(Region-Fully Convolutional Network, R-FCN)等。YOLO(You Only Look Once)算法基于深度神经网络预测目标的类别和位置,运行速度快[13],在电力设备的缺陷检测中得到了大量应用。文献[14]基于YOLOv3模型构建了一种改进的轻量级网络实现绝缘子定位及缺陷检测。文献[15]采用YOLOv3算法建立输电线路鸟类检测模型,精确实时地检测输电线路周围的鸟类数目。文献[16]基于YOLOv3算法实现高压输电线路关键零部件的分类识别。
本文将YOLO算法和模糊评价算法相结合,提出了一种基于图像深度学习的高压断路器操动机构锈蚀状态评估方法。首先利用YOLO算法得到锈蚀位置及等级,然后通过模糊评价算法给出锈蚀状态评价结果。该方法无需安装传感器,利用机器学习,通过对操动机构照片进行图像检测,识别其锈蚀位置和类型,评价锈蚀状态。
2 YOLO模型
2.1 YOLO算法原理
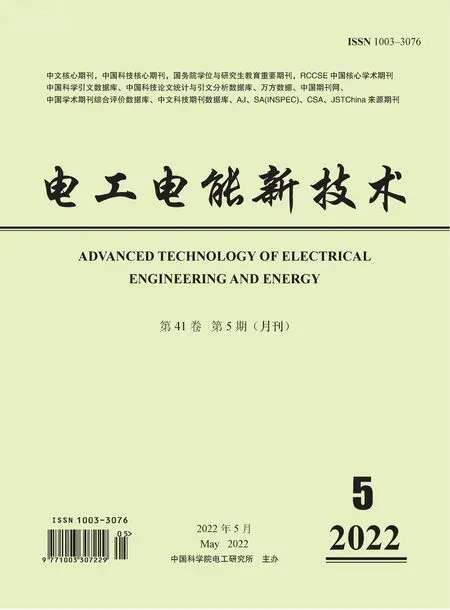
基于深度学习的目标检测算法可分为两类:一阶段和二阶段目标检测算法。YOLO属于一阶段目标检测算法,其原理如图1所示,将输入图片划分为7×7共49个网格,每个网格预测2个边框,共98个候选区,输出一个7×7×(n+4×2+2)的张量,其中,n为网络支持识别的分类数。
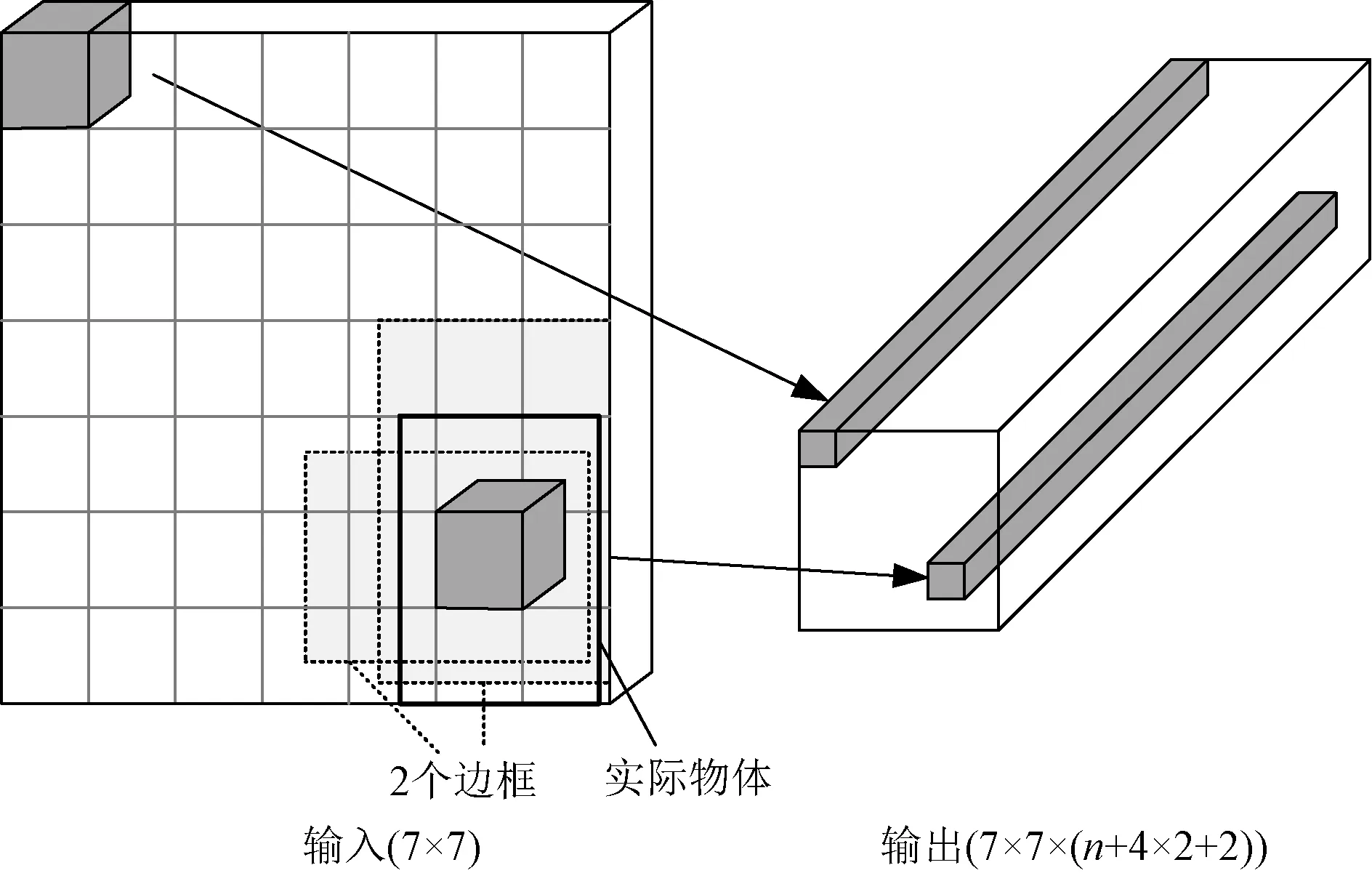
图1 图片划分及预测张量Fig.1 Image division and prediction tensor
该输出向量包含:①该网格存在任一种对象的条件概率,共n个;②边框的位置,每个边框的位置由4个参数表示,即边框中心点的x坐标和y坐标、边框宽度和高度;③边框的置信度(confidence),置信度代表该边框是否包含对象以及位置是否准确,置信度高表示该边框内存在某对象且位置较准确,如式(1)所示:
confidence=Pr×IoU
(1)
式中,Pr为边框内存在对象的概率;IoU为交并比(Intersection over Union,IoU),表示预测边框和实际边框的接近程度,一般约定IoU>0.5时则认为检测正确。
随着YOLO算法的改进,YOLOv2融合深层和浅层特征信息提高检测效果。YOLOv3新增了残差网络,将网络扩展为53层,采用darknet-53网络提取特征,分类器采用交叉熵损失函数代替softmax函数。YOLOv4由CSP Darknet53、空间金字塔池化层(Spatial Pyramid Pooling layer,SPP)以及压缩和激励网络(Squeeze and Excitation Networks,SENet)等组成,提高了目标检测效率[17,18]。YOLOv5由YOLOv4改进而来,但其模型大小仅为YOLOv4的11%,在保证准确率的基础上实现了轻量化,提高效率[19,20]。
2.2 YOLOv5网络模型
YOLOv5根据网络深度和宽度的不同,可分为YOLOv5n、YOLOv5s、YOLOv5m、YOLOv5l和YOLOv5x见表1。ckpt为网络权重文件,mAPtest@0.5为取IoU大于0.5,网络在COCO 2017测试集上的平均精度。其中YOLOv5n网络最小,精度最低;YOLOv5x网络深度和宽度最大,精度最高,但运算量最大、速度最低。

表1 YOLOv5网络结构的对比Tab.1 Comparison of network size and performance among different YOLOv5 models
上述YOLOv5网络均由4个部分组成:输入端、backbone基准网络、neck网络及输出端。
2.2.1 输入端
在实际工程应用中,数据集的图片长宽比通常不统一。为提升算法推理速度,YOLOv5网络在输入端的图像预处理阶段引入自适应图片缩放方法。YOLO系列算法训练时,需要根据数据集设定初始锚框。锚框是将图片分割成m×n个区域,在每个格子的中心,按照设定的长宽比,生成的一系列边框,如图2所示。假设锚框左上角所在格子的左上角坐标为(cx,cy),ph和pw为锚框的长和宽,则预测框的中心坐标(bx,by)及其长(bh)、宽(bw)如式(2)所示,其中,σ(x)为sigmoid函数,tx,ty,th和tw即为网络要预测的预测框参数。
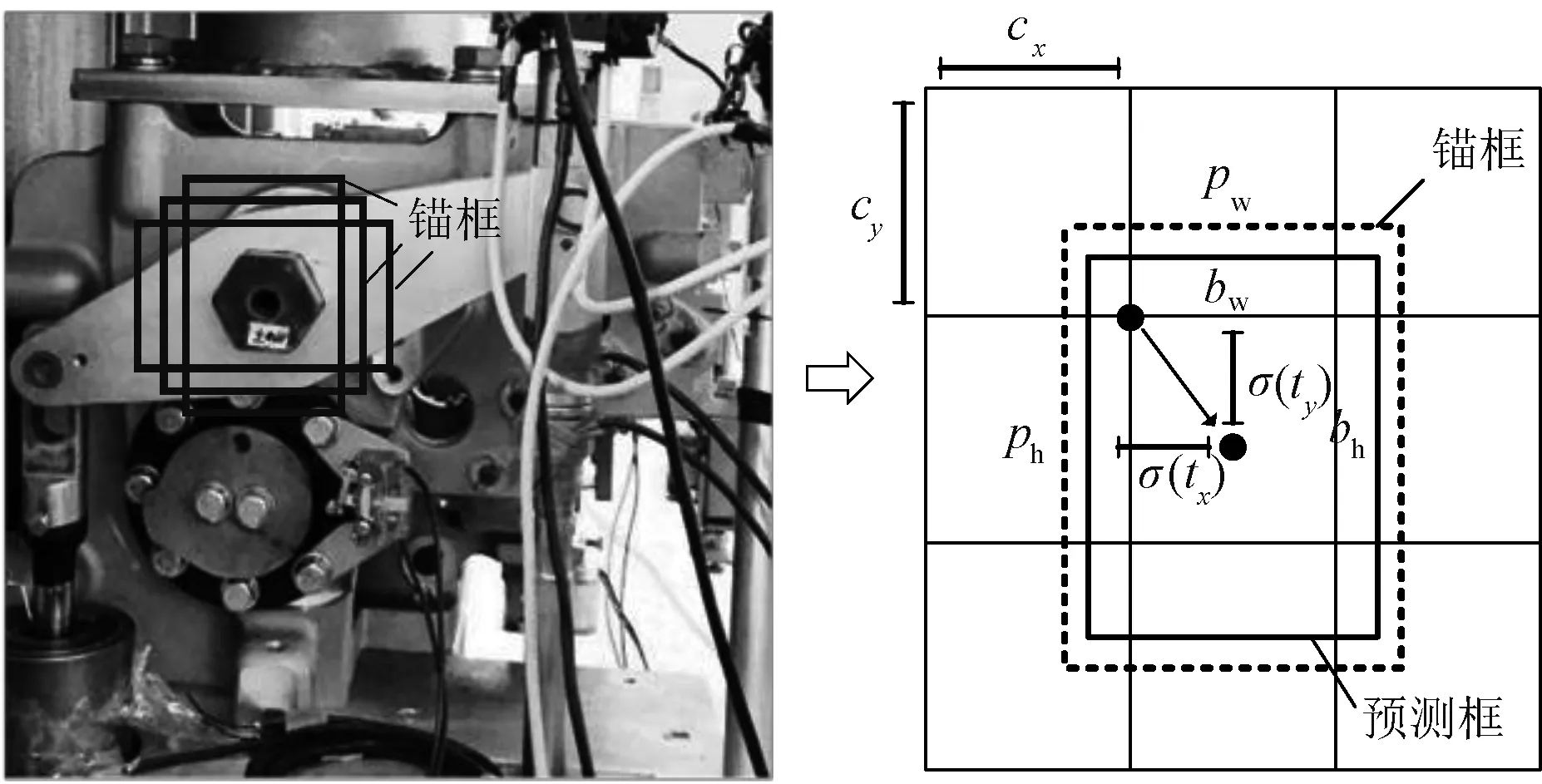
图2 锚框及预测框Fig.2 Anchor box and bounding box
(2)
这些锚框被视为候选区域,网络对这些候选区域内是否包含物体进行预测,若包含目标物体,则判断物体类别,并在锚框的基础上进行微调得到准确描述物体的预测框。对于不同数据集,YOLOv5算法引入自适应锚框计算,在正式训练之前计算数据集标注信息针对网络配置文件中默认锚框的最佳召回率,若最佳召回率小于0.98,重新计算符合该数据集的锚框。
另外,YOLOv5在训练阶段沿用了YOLOv4中的Mosaic数据增强方法,该方法将数据集中的4张图片随机缩放、裁剪并拼接,在丰富数据集的同时加快网络训练速度,提升模型分类效果。
2.2.2 backbone基准网络
YOLOv5网络在backbone部分添加了Focus结构,该结构在不丢失信息的情况下,增加前后反馈速度,其中关键的一步为切片,如图3所示。通过切片,4×4×3的图像将变为2×2×12的特征图。对于YOLOv5网络,以YOLOv5s结构为例,640×640×3的原始图像输入Focus结构,经过切片操作变为320×320×12的特征图,再经过卷积最终变为320×320×32的特征图。
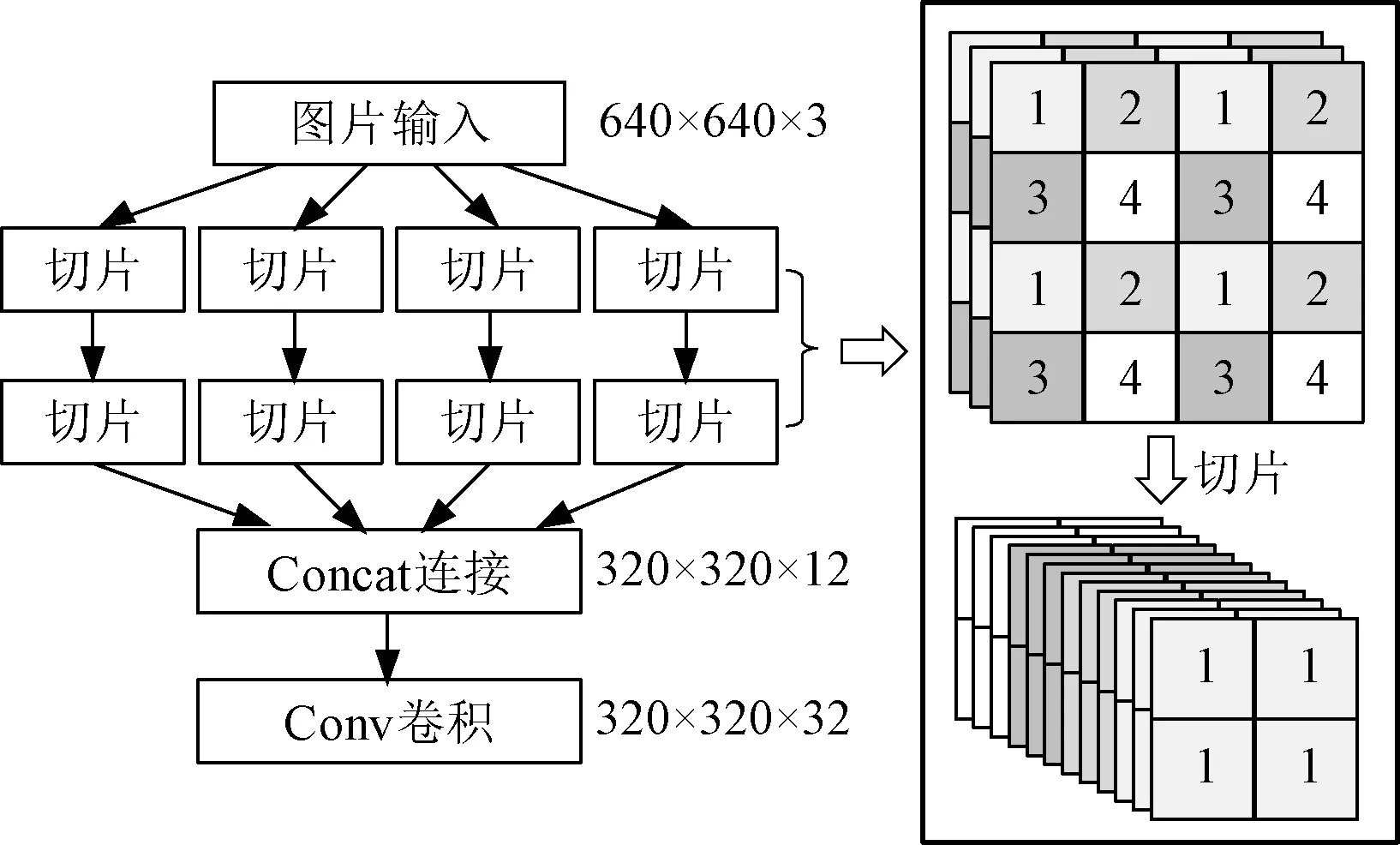
图3 YOLOv5 Focus结构Fig.3 Focus structure of YOLOv5
2.2.3 neck网络
YOLOv5的neck网络沿用了YOLOv4中的特征金字塔网络(Feature Pyramid Networks, FPN)及路径聚合网络(Path Aggregation Network, PAN)结构,FPN通过上采样的方式自顶向下的将高层特征信息传递融合,PAN则自底向上的传达强定位特征。不同的是,YOLOv4采用普通卷积操作,YOLOv5借鉴跨阶段局部网络CSPnet(Cross Stage Partial network)引入了CSP2_X结构,如图4所示。

图4 YOLOv5s的CSP2_X结构Fig.4 Structure of CSP2_X of YOLOv5s
CSP2_X将主干网络分成2个分支再连接,加强了网络特征融合能力,与此同时,更多的特征信息得到保留。其中,CBL(Conv-BN-Leaky relu)由卷积Conv层、批量归一化(Batch Normalization, BN)层和激活函数Leaky relu组成。
2.2.4 输出端
YOLOv5在输出端采用GIoU_Loss作为边界框的损失函数,其定义如式(3)所示。IoU为目标框A与预测框B的交集与并集之比,如图5所示。C为包含目标框A与预测框B的最小外接框,C/(A∪B)则为外接框C中未包含A、B的部分。
(3)

图5 损失函数的说明Fig.5 Explanation of loss function
3 锈蚀状态综合评价
3.1 层次分析法
高压断路器操动机构锈蚀状态评估包含多种影响指标,而且各指标对操动机构运行状态影响程度不同,因此选用层次分析法(Analytic Hierarchy Process,AHP)确定各定性指标的权重,并结合专家经验与高压断路器功能结构特点,建立的操动机构锈蚀状态评估体系见表2,其评价指标包括锈蚀位置和锈蚀等级2个方面。
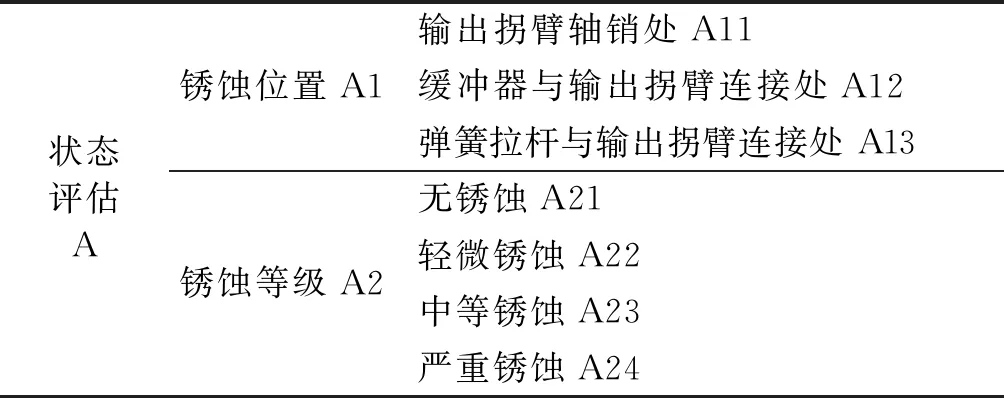
表2 高压断路器操动机构锈蚀状态评估体系Tab.2 Rust status evaluation system for operating mechanism of high voltage circuit breaker
层次分析法以专家咨询为基础,把复杂问题分解成相互联系的有序层次,对比同一层次指标的重要性得到系统判断矩阵,求取判断矩阵最大特征根所对应特征向量,将其归一化处理后即为权重向量,从而将定性问题转换为定量分析[21]。其中,判断矩阵标度方法见表3。
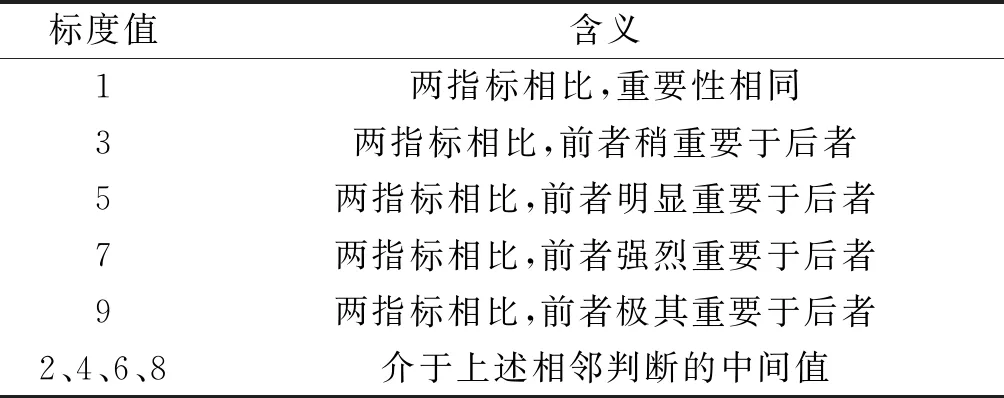
表3 判断矩阵标度方法Tab.3 Scaling method of judgement matrix
3.2 模糊综合评价
本文对于高压断路器操动机构锈蚀状态的评价流程为:①确定评价指标及评语集;②量化评价指标并计算指标综合权重;③利用YOLOv5算法检测操动机构图片中的锈蚀位置和锈蚀等级;④根据隶属度函数,确定指标模糊评估矩阵R;⑤计算模糊评价向量B,给出综合评价结果。
上述流程中的评价指标见表2。考虑断路器实际工作情况,建立操动机构状态评语集包含4个等级{危急、预警、一般、正常}。主观权重根据AHP构建判断矩阵确定,由于AHP属于主观赋权法,本文采用主客观综合赋权法计算综合指标以弥补其客观性差的缺点[22]。其中客观权重按照专家打分的方式确定,综合权重由主观权重和客观权重的加权平均值计算得出。本文采用如图6所示的三角形和梯形组合的隶属度函数。其中,“危急”状态V1在0~50之间,“预警”状态V2在50~70之间,“一般”状态V3在70~90之间,“正常”状态V4在90~100之间。对于评价结果为“危急”状态的缺陷应立即处理,“预警”状态的缺陷应引起关注,尽快处理,避免其进一步发展。
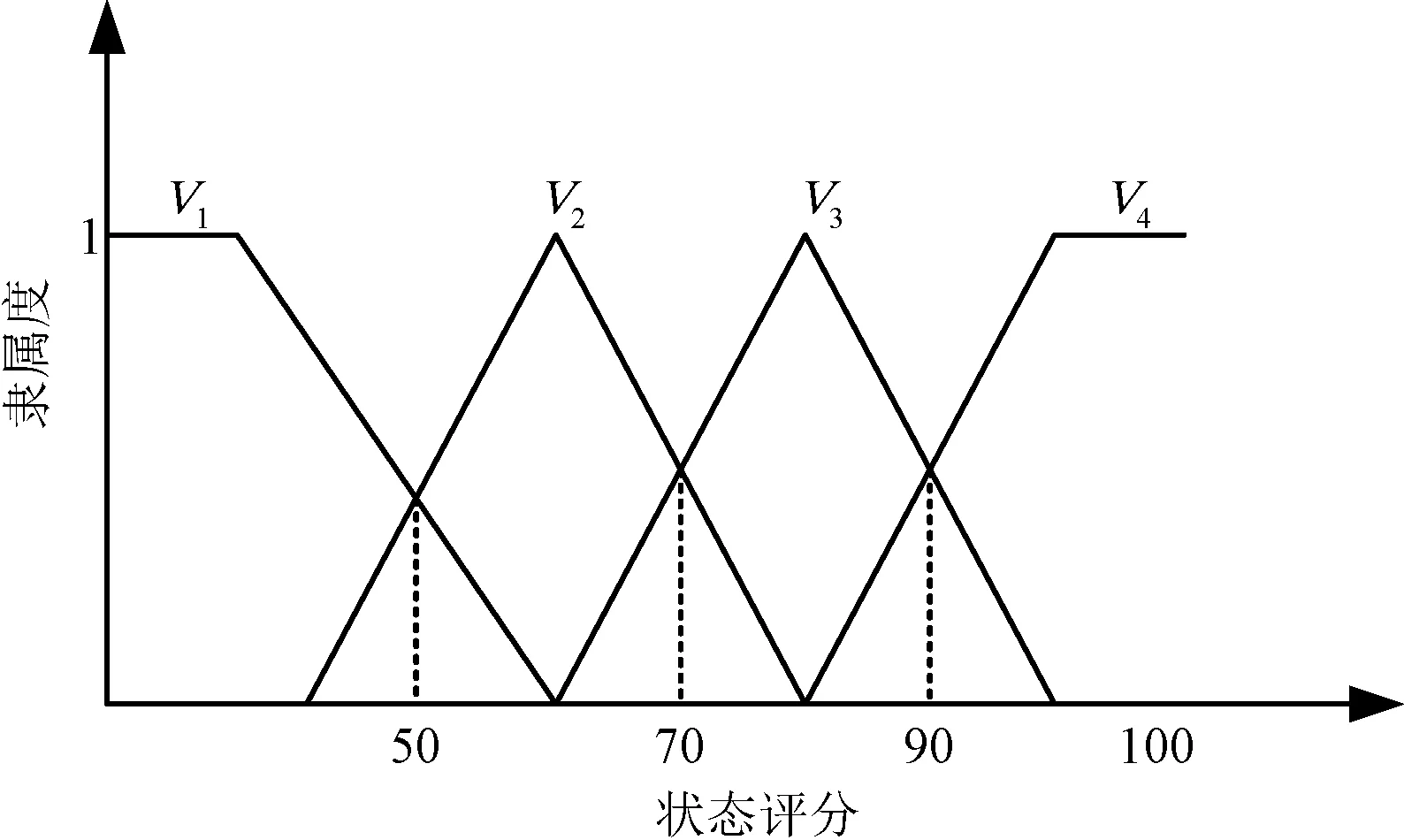
图6 三角形-梯形隶属度函数Fig.6 Triangle-trapezoidal-shape membership function
将锈蚀检测结果结合专家建议的隶属度代入隶属函数得出模糊评估矩阵R,如式(4)所示。利用模糊运算Bi=Wi×Ri得出各层指标的模糊综合评价向量Bi,其中Wi为各层指标权重向量,Ri即为各层指标模糊评估矩阵。
(4)
4 高压断路器操动机构锈蚀状态评估
通过图形深度学习,评估高压断路器操动机构锈蚀状态的实施过程如图7所示。检测时,输入高压断路器操动机构的照片,首先检测照片中是否含有关键零部件,有则根据坐标信息裁剪得到单独的关键零部件。然后检测关键零部件连接处是否存在锈蚀及其锈蚀等级。最后根据得到的锈蚀位置及锈蚀等级,通过模糊评价算法评估,获得高压断路器操动机构锈蚀缺陷状态。
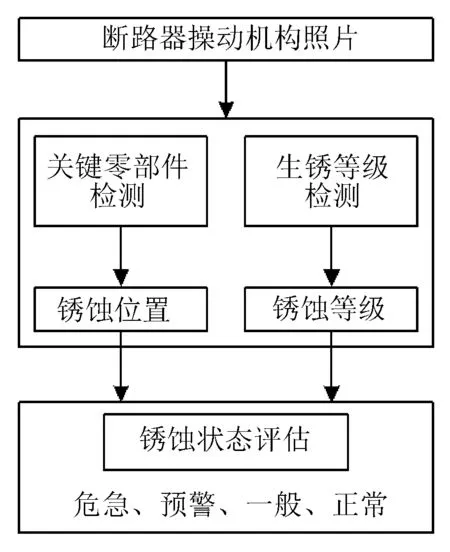
图7 高压断路器锈蚀状态评估Fig.7 Rust status evaluation of high voltage circuit breaker
4.1 锈蚀位置与锈蚀等级检测
4.1.1 数据集的收集与数据增广
原始数据集由变电站等实际作业环境中采集的结构类似的高压断路器操动机构照片构成。在断路器操动机构锈蚀检测领域,目前没有公开的大型数据集,且实际采集照片数量有限,因此本文首先通过非形变的旋转、随机裁剪对数据集进行初步增广。参考国家标准GB/T 8923.1—2011对锈蚀等级的规定,使用图像处理软件将标准中给出的不同等级锈蚀照片添加至操动机构关键零部件连接处,以扩充锈蚀检测数据集样本[23]。由于锈迹的颜色和形状与设备本身的颜色形状及所处环境相关,不同设备产生的锈迹差异较大,相同设备在不同温度、湿度下锈蚀状况有所不同,因此采取颜色变换、随机插入高斯噪声、随机高斯模糊等方式,进一步扩充锈蚀数据样本。
4.1.2 数据集标注
本文使用labelImg软件对数据集图片进行标注,该软件可以快速生成包含目标物体位置与类别信息的文件。为得到操动机构的锈蚀位置和锈蚀等级,分别建立关键零部件检测训练模型和锈蚀等级检测训练模型,因此数据集标注分为锈蚀位置标注和锈蚀等级标注。经过收集数据集和数据增广,检测锈蚀位置的数据集有256幅图片,检测锈蚀等级的数据集有640幅图片。根据高压断路器操动机构结构特点和动作原理,关键零部件连接处锈蚀时会引起卡涩等现象,但仅标注连接处无法直接获得具体锈蚀部件。因此本文采取标注零部件及标注连接处锈蚀等级的方式体现锈蚀位置和锈蚀等级。例如按照操动机构结构,若输入图片检测出缓冲器则代表状态评估体系中的缓冲器与输出拐臂连接处,检测出弹簧拉杆则对应弹簧拉杆与输出拐臂连接处。
4.1.3 锚框计算
YOLOv5网络的锚框参数共有3行,每行9个数值,第1行代表最大的特征图上的锚框,第3行代表最小的特征图上的锚框,第2行即为中等大小的特征图上的锚框。网络配置文件中默认初始锚框值为COCO 2017数据集的预设锚框,为提高模型检测准确率,基于K-means聚类和遗传算法计算关键零部件数据集锚框和锈蚀等级数据集锚框的初始值。
4.1.4 数据训练和结果分析
本文的实验环境为Windows10操作系统,Intel(R) Core(TM) i7-7800HQ CPU @3.20 GHz,基于PyTorch机器学习框架搭建YOLO模型,使用CPU训练。所有实验均训练500个循环,实验结果从召回率Recall、准确率Precision、mAP@0.5和模型性能4个角度对比,计算公式如下。
(5)
(6)

(7)
式中,NTP、NFN和NFP分别为检测正确的目标数、检测错误的目标数和没有被检测出的目标数。因此召回率即为检测正确的目标数量与所有目标数量之比,准确率则为检测正确的目标数量与所有预测框数量之比。以Recall值和Precision值分别作为横轴和纵轴绘制P-R曲线,并对其进行平滑处理,平均精度AP为P-R曲线面积。mAP@0.5指IoU阈值设置为0.5时的平均精度。
以训练集与测试集比值为8∶2的比例分割各数据集,各模型检测测试集的召回率、准确率和mAP@0.5对比如表4、表5、图8和图9所示。对于锈蚀位置检测,YOLOv5s和YOLOv5l模型的平均检测精度相同,其召回率和准确率均普遍高于YOLOv3和YOLOv4,但YOLOv4对拐臂的识别准确率更高。此外,YOLOv5l的准确率和召回率略高于YOLOv5s。针对锈蚀等级的检测,YOLOv5s和YOLOv5l模型的各项指标普遍高于YOLOv3;对于无锈蚀和严重锈蚀,YOLOv4的召回率高于YOLOv5;对于严重锈蚀,YOLOv4的平均精度mAP@0.5高于YOLOv5s。
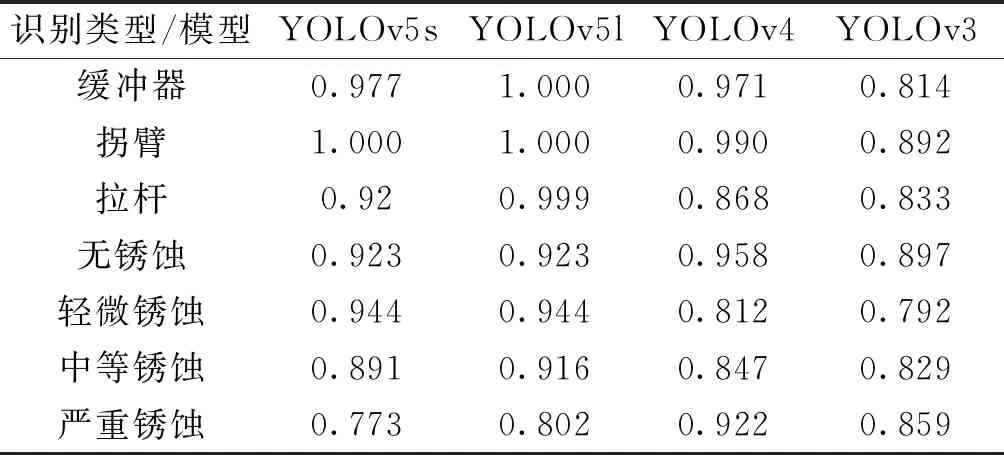
表4 各模型召回率测试结果对比Tab.4 Comparison of recall ratio of different YOLO models
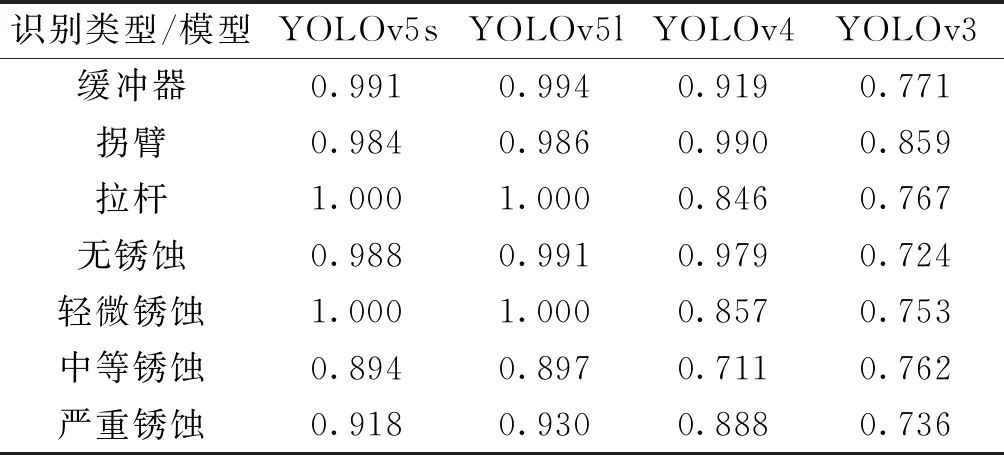
表5 各模型准确率测试结果对比Tab.5 Comparison of precision of different YOLO models
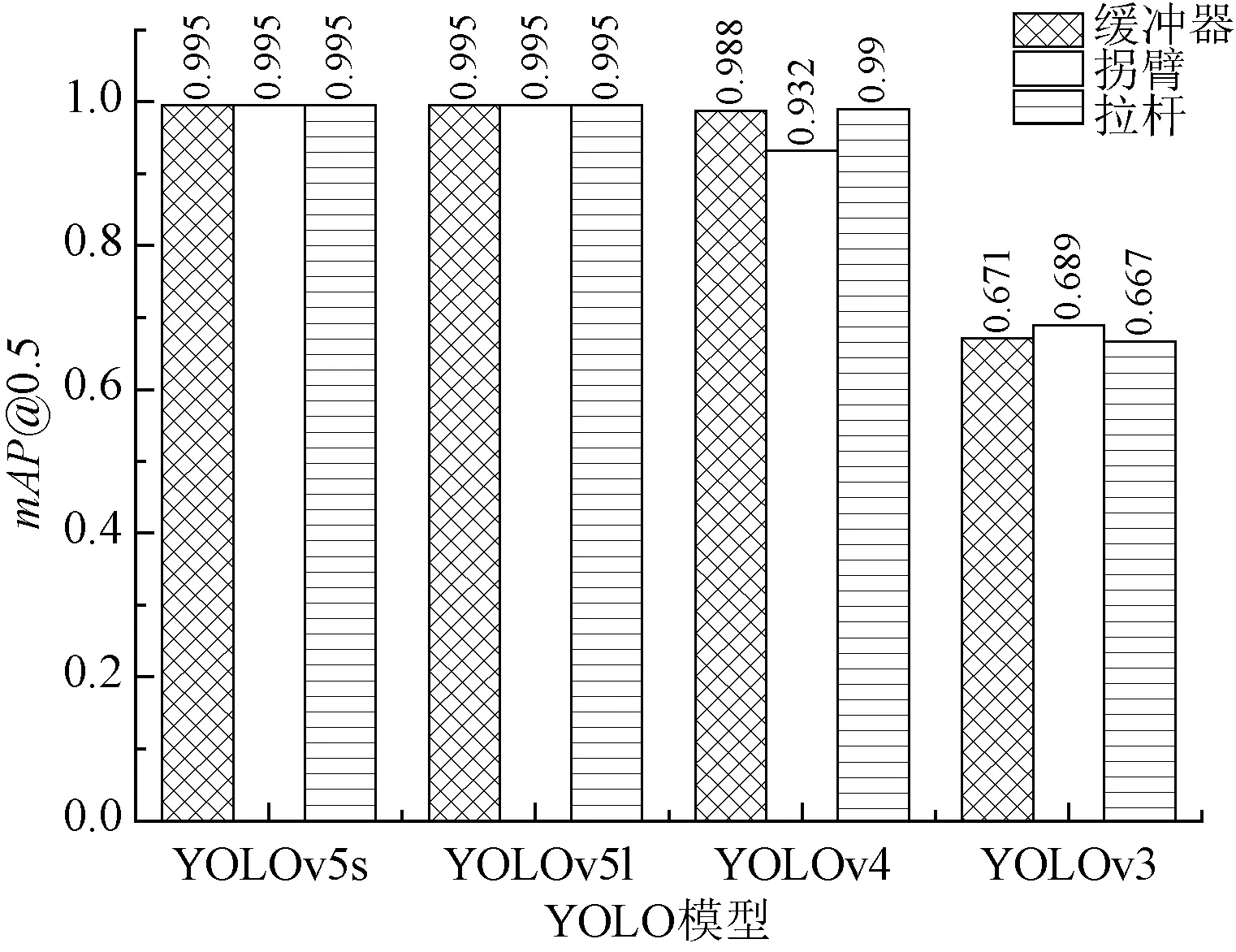
图8 锈蚀位置mAP@0.5检测结果Fig.8 Detection results of rust position based on mAP@0.5
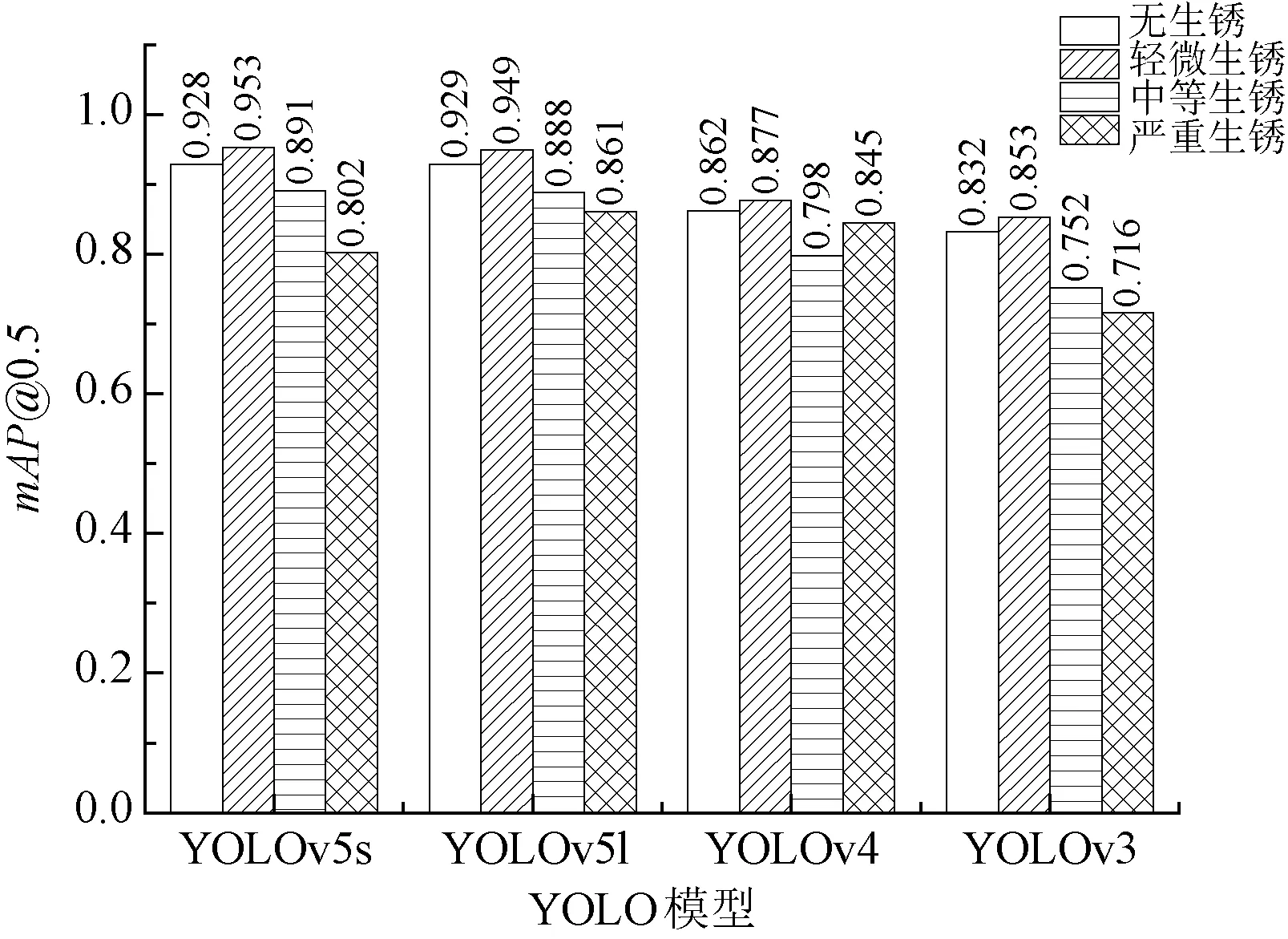
图9 锈蚀等级mAP@0.5 检测结果Fig.9 Detection results of rust level based on mAP@0.5
表6给出了各模型的训练时间、训练结束后生成的权重文件大小以及单张照片的检测速度。可以看出,相对于YOLOv4和YOLOv3,YOLOv5s和YOLOv5l生成的权重文件大幅减小,训练时间和单张照片的检测速度大幅加快,YOLOv5s训练时间较YOLOv4和YOLOv3提升了5~8.4倍,检测速度提升了4.6~5.2倍,YOLOv5l的训练时间和检测速度则分别提升了1.6~2.8倍和3.9~4.5倍。结合召回率、准确率和mAP@0.5的对比,YOLOv5模型在训练时间和检测速度上具有很大优势,召回率、准确率和精度也高于YOLOv3和YOLOv4模型。在不考虑训练时间和内存的情况下,YOLOv5l模型表现出最佳的性能。
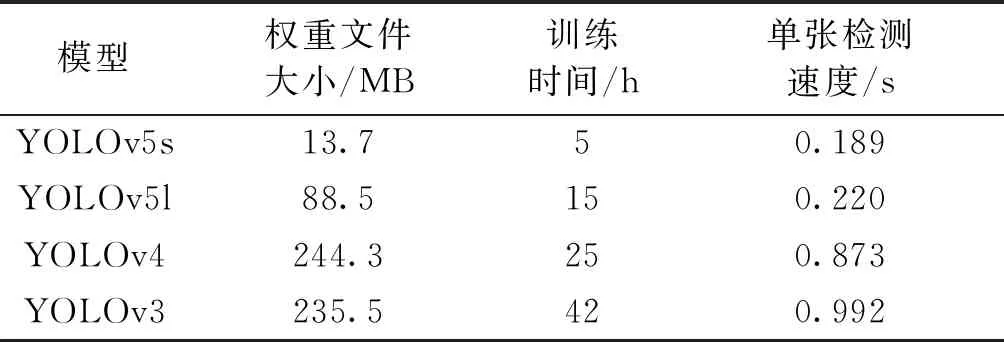
表6 各模型性能对比Tab.6 Comparison among different YOLO models
4.2 高压断路器操动机构锈蚀状态评价
4.2.1 指标权重计算
由于锈蚀位置和锈蚀等级对高压断路器锈蚀状态评价同样重要,因此准则层的权重定为[0.5 0.5]。利用AHP法构建锈蚀位置层的判断矩阵为:
(8)
计算C1最大特征根对应的特征向量为[0.318 3 0.802 1 0.505 3],标准化后得锈蚀位置层的主观权重为[0.195 8 0.493 4 0.310 8],根据专家打分得客观权重为[0.40 0.25 0.35],则该层指标综合权重为[0.297 9 0.371 7 0.330 4]。
构建锈蚀等级层的判断矩阵为:
(9)
同理,计算锈蚀等级层的主观权重为[0.657 4 0.202 7 0.094 2 0.045 7],专家打分得客观权重为[0 0.4 0.2 0.4],则该层指标综合权重为[0.328 7 0.301 4 0.147 1 0.222 8]。
4.2.2 状态评价
以某变电站现场采集的126 kV高压断路器操动机构实际照片为例,使用YOLOv5s模型检测锈蚀位置和锈蚀等级,原始图像和识别结果如图10所示。其中,图10(a)为原始图像。从图10(b)可以看出,YOLOv5s模型识别出缓冲器和拐臂,图10(c)中YOLOv5s检测出缓冲器中有74%的概率包含轻微锈蚀,60%的概率包含严重锈蚀。
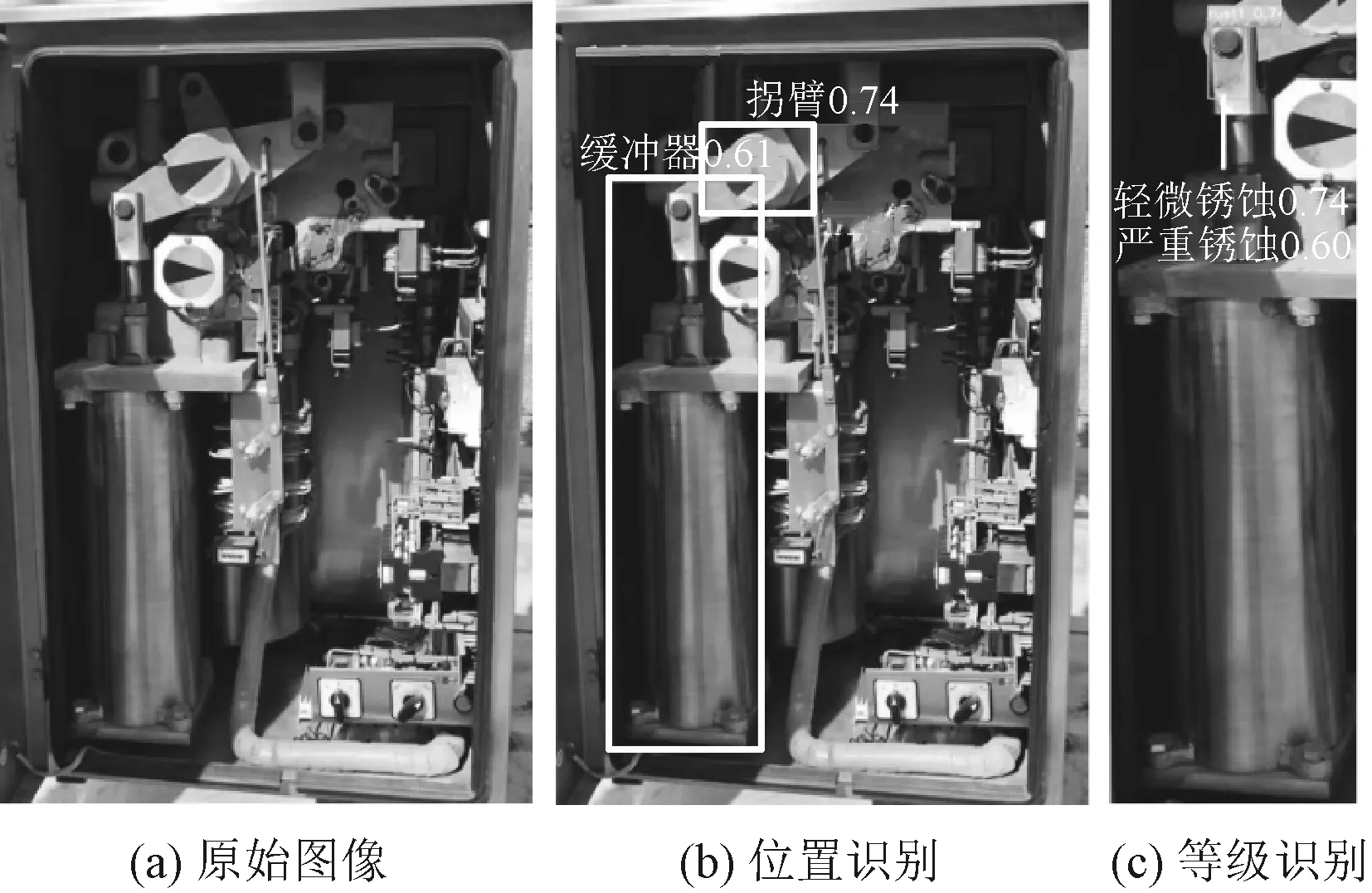
图10 YOLOv5s检测结果Fig.10 Detection results of YOLOv5s
根据检测信息代入隶属度函数后,得到锈蚀位置层和锈蚀等级层的模糊评估矩阵分别为:
(10)
(11)
进一步计算得到锈蚀位置和等级的各层模糊综合评价向量分别为B1=[0.029 8 0.129 8 0.629 8 0.210 6],B2=[0.0 0.244 5 0.685 6 0.069 9],从而对高压断路器操动机构锈蚀状态综合评价可得:
(12)
从模糊运算结果可以看出,该高压断路器操动机构锈蚀目前处于“一般”状态。从实际情况来看,该高压断路器在缓冲器与拐臂连接处产生轻微锈蚀,连接螺栓表面产生严重锈蚀,缓冲器吸收剩余动能的能力略有下降,但不影响断路器正常使用,且其他部位正常运行,整体处于“一般”状态,与评判结果一致。
5 结论
本文以高压断路器操动机构锈蚀状态作为研究对象,通过图像深度学习识别锈蚀位置和锈蚀等级的评价指标,再经过模糊评价算法,实现操动机构锈蚀状态的综合评价。通过YOLOv5s、YOLOv5l、YOLOv4和YOLOv3模型的对比测试,表明YOLOv5模型具有轻量化的优点,在训练和检测速度更快的同时,可达到较高的识别精度。实例表明,运用本文方法可以实现高压断路器操动机构锈蚀状态的评估,结果具有合理性。