举升力动态控制的电液辅助坐垫设计
2022-05-28倪晨超李毅康劳立明
倪晨超 李毅康 劳立明
(台州学院 航空工程学院,台州 318000)
老年人由于肌肉萎缩下肢力量较弱,普遍存在从座椅上起身困难的问题,对生活质量有较大影响。此外,部分下肢创伤患者在完全康复前也需要护理人员提供起身辅助。
不少学者研发了具有辅助起身功能的老年椅或者坐垫,并从起立动作分析[1]、辅助机构运动学分析[2]以及结构设计[3]等方面展开研究。这些设计通常未考虑起身过程所需支撑力的动态变化,以实现起身运动轨迹为主要目标,造成使用者在起身过程中的强迫感,甚至造成恐慌心理。论文讨论了一种以举升力控制为目标,能够适应起身时膝关节力矩需求的辅助坐垫,与起身过程匹配良好。
1 坐姿起身的膝关节力矩
辅助坐垫的结构及控制设计需要获得人体起身过程中的膝关节力矩。本文采用测量起身过程中的关节角度,通过人体模型的动力学逆解求解关节力矩[4]。
1.1 关节角度测量
关节角度测量采用3个惯性传感器,分别绑在实验者的小腿、大腿和腹部,随起身过程中躯干的运动而发生角度变化,如图1所示。3个惯性传感器通过Modbus总线连接,电脑上位机软件能实时采集并保存传感器角度值。
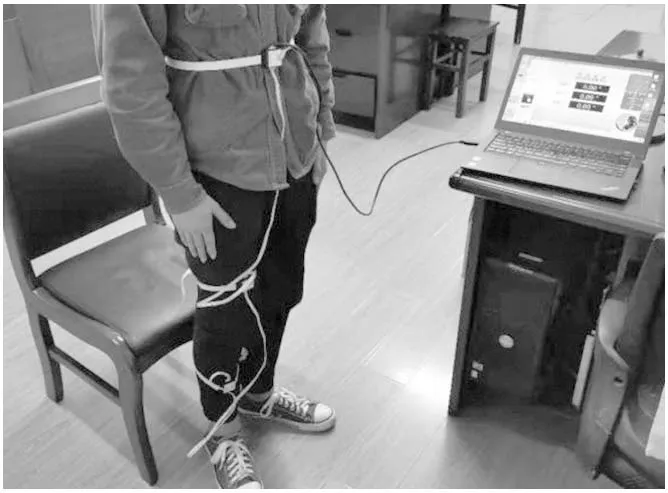
图1 关节角度测量
自下而上3个传感器角度值分别为θ1、θ2和θ3。踝关节转角变化为θ1,膝关节转角变化为θ2-θ1,髋关节转角变化为θ3-θ2。关节转角测量值如图2所示。
1.2 膝关节力矩估计
SolidWorks motion是以ADAMS为内核的三维运动与动力学仿真插件。在三维软件中建立仿真人体模型,模型人身高为175 cm,质量为65 kg,仿真结果如图3所示。
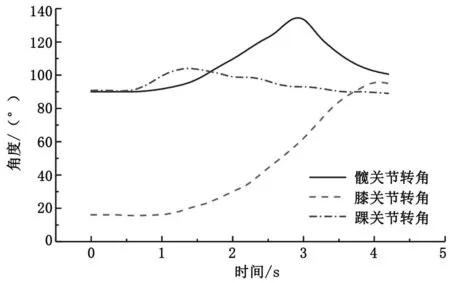
图2 关节角度变化数据
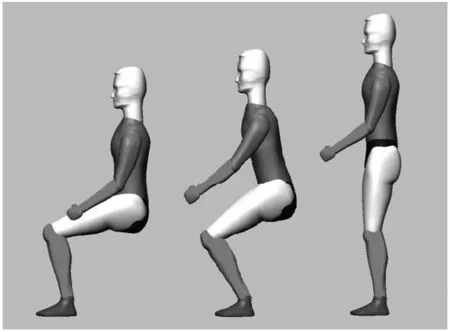
图3 SolidWorks仿真人体模型
仿真分析过程如下:
(1)设置仿真人初始位置为落座姿态,添加踝关节、膝关节和髋关节处的“马达”,马达角位移按图2测得数据给定;
(2)设置脚底面和其他部位不动,并添加重力场;
(3)SolidWorks解算人体从坐姿起身的膝关节处马达扭矩。
起身过程膝关节动态力矩如图4所示。可见,初始阶段所需要的膝关节力矩最大约36 N·m,起身完成时所需的膝关节力矩较小,起身困难出现在初期阶段。
2 坐垫结构及电液驱动设计
2.1 坐垫结构设计
坐姿起身过程中,臀部运动是平移和旋转的复合运动。现有大部分起身坐垫只能实现单一旋转运动,与起身过程不匹配。
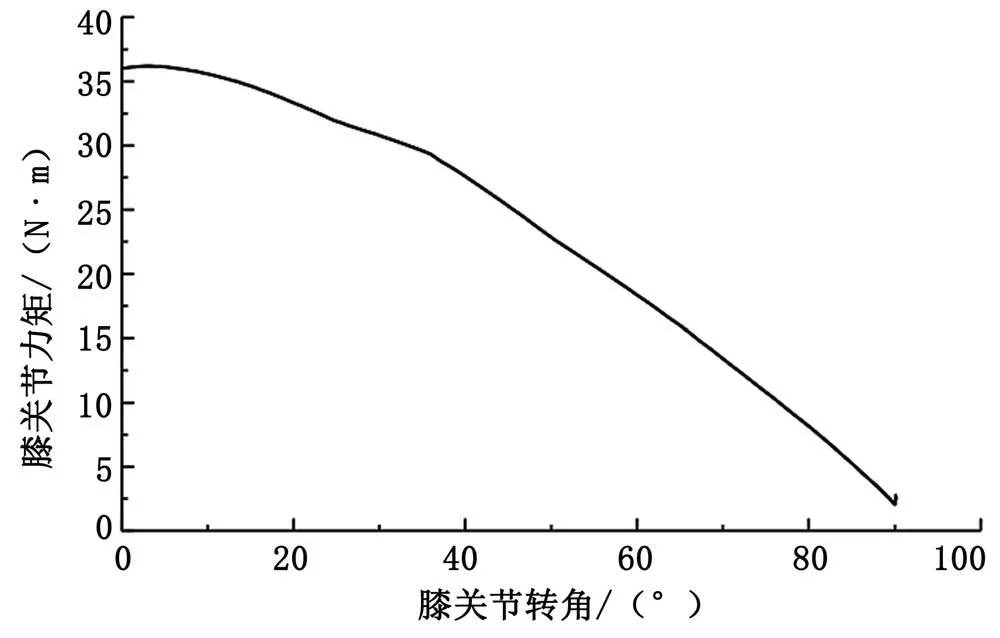
图4 膝关节力矩仿真结果
新型坐垫机械结构如图5所示,主要包括底座、坐板、可调支架杆和驱动油缸4部分。底座提供基础支撑,并容纳驱动油缸和控制电路。坐板支撑臀部,实现旋转和平移的复合运动。可调支架杆通过销钉在调节孔处与另一支架杆配对铰接。油缸驱动坐板抬升。
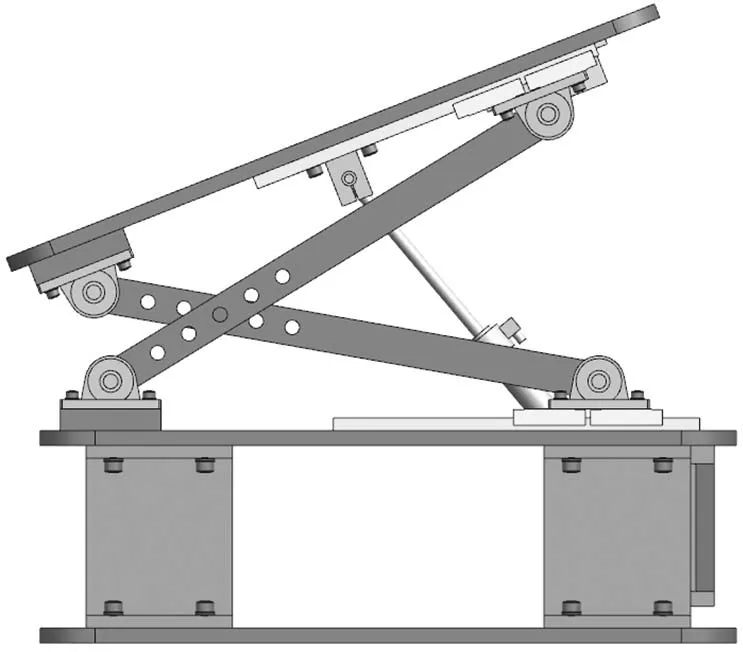
图5 坐垫机械结构
该结构在传统剪叉式升降机构上进行创新,把固定居中的支架铰接点重新设计为可调且偏置的。选择合适的孔位,在销钉约束下坐垫将向斜上方抬起,呈现为平移和翻转的复合运动,更加符合人体起身姿态。
2.2 电液驱动设计
坐板举升由液压缸推动,推力受液压压强控制。通过控制进入密闭容腔的油液流量调节液压压强,相对刚度小于电动推杆,具有更好的控制效果。
电液系统如图6所示,主要包括直流无刷电机、微型齿轮泵、溢流阀、换向阀、压力传感器和微型油缸。直流电机由电机控制器动态调节转速,并驱动微型齿轮泵变转速工作。转速越高,泵输出油液流量越大。换向阀得电时,油路接通,泵输出油液通过进入液压缸的无杆腔。通过控制液压缸无杆腔压强,可调节坐垫举升力大小。
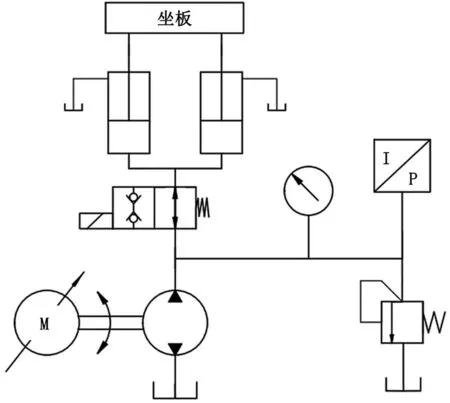
图6 电液驱动系统
3 控制系统设计
3.1 控制硬件电路
控制电路元器件包括Arduino UNO控制板、电机控制器、压力传感器和位移传感器等,硬件结构如图7所示。Arduino UNO为低成本的主控板。电机控制器接收Arduino UNO输出的脉冲宽度调制(Pulse Width Modulation,PWM)信号并调节电机转速。压力传感器测量油腔压强,位移传感器测量液压缸位移。
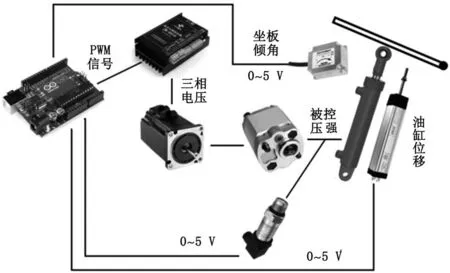
图7 控制系统硬件结构
3.2 控制策略
压强控制程序在Arduino UNO中编写,通过调用
3.2.1 液压缸目标压力
在起身前期,坐板转角θ和膝关节转角近似相等。膝关节力矩近似表示为坐板转角的函数Tx(θ)。设坐垫辅助系数为α,则提供的辅助力矩Tf(θ)为:

液压缸举升力乘以支撑力臂即为辅助力矩:

于是,液压缸的目标压强pd即为:

式中:Ap为液压缸活塞面积;L为油缸支撑力臂长度。
3.2.2 压强控制算法
压强控制算法是坐垫性能的关键。已有研究主要讨论了液压压强控制算法,包括PI控制[5]、模糊控制[6]等。受限于Arduino UNO的CPU算力,本文采用计算量较小的P控制方法。同时,为提高压力控制精度,本文参考Kim等提出的速度补偿算法[7],算法框图如图8所示。其中:D为液压泵排量;KF和Kω分别为压强和速度比例系数。
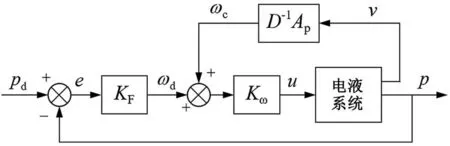
图8 控制算法框图
液压缸速度v由位移微分获得,速度相关补偿量为:

最终,直流无刷电机转速控制信号为:

4 实验与分析
如图9所示,制作了辅助坐垫实物样机,并开展坐垫样机的使用性能测试。测试员通过控制自身膝关节施加力量,分成较不使力(工况1)、一般使力(工况2)、较为使力(工况3)这3种工况,模拟不同用户下的辅助坐垫性能。力矩补偿系数α设为0.5,即坐垫提供50%起身所需力矩。坐垫及控制器参数如表1所示。
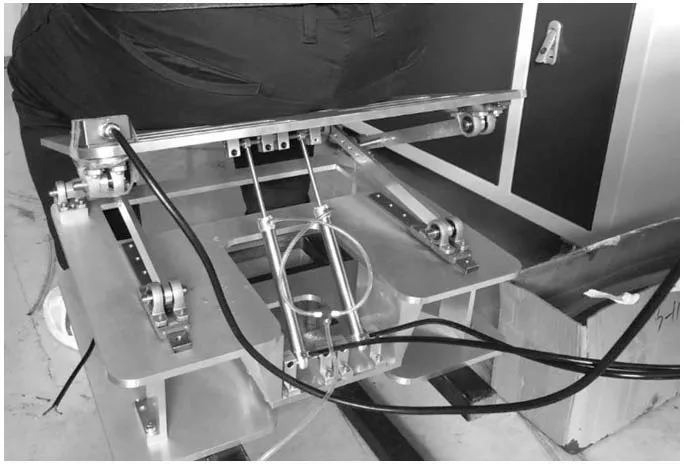
图9 辅助坐垫样机

表1 坐垫及控制器参数
实验测得的压强曲线如图10所示。可见:当用户自身膝关节使力较小时(工况1),坐板不足以推动用户起身,坐板位置保持不变,油缸压强维持在最大目标压强值6 MPa;当用户自身膝关节力与调定的辅助系数相匹配时(工况2),坐板能始终紧贴用户臀部,油缸压强基本能跟随设定的目标压强值变化,实现了良好的辅助起身效果;当用户自身膝关节施力较大时(工况3),压强下降较大但仍能提供一定推力。
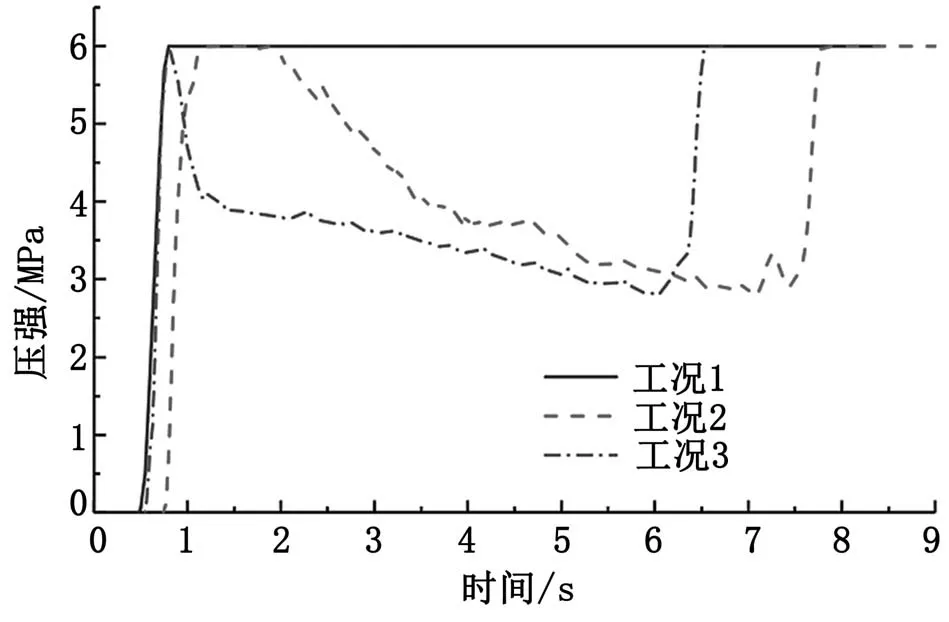
图10 不同工况下的压强曲线
分析结果表明,举升力动态控制辅助坐垫能有效帮助用户起身,且能适应不同膝关节力量的用户。当膝关节力量较弱时,坐垫不会主动推动用户起身,避免造成心理恐慌。只有当膝关节出力达到一定程度时,辅助坐垫才会跟随使用者臀部运动,并提供一定的辅助力。
5 结语
本文通过起身时膝关节力矩估计、举升机构创新设计以及速度补偿压强控制实施等,实现了举升力动态控制的辅助坐垫设计。后续工作中,将对辅助坐垫的结构集成化设计、压强控制算法智能适应以及采用EMG信号效果评估等方面开展持续研究,进一步扩展坐垫的实用性。