低轨卫星测控系统三轴12 m反射面天线系统的结构设计*
2022-05-27刘健泉周昊天何翠瑜梁成壮王奥雨蒋立坤
刘健泉,周昊天,何翠瑜,梁成壮 ,王奥雨,蒋立坤 ,牛 耕
(1.中国电子科技集团公司第五十四研究所,石家庄 050081;2.中华通信系统有限责任公司河北分公司,石家庄 050081)
0 引 言
随着全球航天测控技术的飞速发展,卫星遥感数据接收系统无论是在商用领域还是军用领域的应用越来越广泛,遥感卫星地面接收系统也在快速发展中[1]。为适应高码速率卫星的测控需求,测控数传地面站一般采用大口径天线。
大口径测控数传一体化天线存在的关键问题是Ka频段的波束宽度很窄,指向精度要求优于0.015°,传统的天线结构及控制方法难以达到较高的指向误差要求。为此,12 m反射面天线应从高刚度天线结构设计技术、全数字化控制系统等方面尽可能地减小或控制各项误差,特别是对大误差项进行控制,以提高天线系统的指向精度。
本文根据实际工程的需要,提出了一种新的三轴12 m反射面天线设计思路,通过优化设计,研发了一款高刚度、高精度天线结构、座架和伺服设备,解决了大口径天线大跨度、高精度、窄波束指向跟踪的难题。通过有限元仿真软件对12 m反射面天线的整体承载结构进行了刚度分析、强度分析、面型精度分析与结构固有频率分析,结果表明典型仰角下的天线主面精度、承载能力及谐振频率均满足要求。同时,根据设计结果,加工制造了12 m反射面天线实物,经过现场电气测试和跟踪联试,天线系统的主面精度、增益、系统G/T值、跟踪精度等均满足指标要求,可直接应用于实际工程中。
1 天线系统结构设计
1.1 12 m反射面天线的主要性能指标
工作频率:X频段、Ka频段。
系统G/T值(环境温度-20℃~60℃,晴空、微风,仰角≥20°):≥35.4+20lg(f/f0)dB/K,f0=8.35 GHz;≥38.7+20lg(f/f0)dB/K,f0=19.2 GHz。
反射面精度:主反射面总装精度≤0.3mm(RMS);副反射面精度≤0.12 m(RMS)。
最大角速度:方位≥20(°)/s;俯仰≥15(°)/s;倾斜≥6(°)/s。
跟踪精度:优于1/10倍半功率波瓣宽度。
天线面参数:主面直径12 m,焦径比f/D=0.31;副面直径1.2 m,离心率e=1.45。
差波束零深(与和波束比):≥30 dB(X/Ka频段)。
天线整体谐振频率:≥4.5 Hz。
1.2 12 m反射面天线结构特征
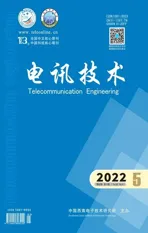
12 m反射面天线采用主反射面高精度、副反射面撑腿支撑技术,天线整体结构简单、刚度大、重量轻。12 m反射面天线反射体主要由主反射面、反射体骨架、副反射面、馈源网络支撑等组成,如图1所示。
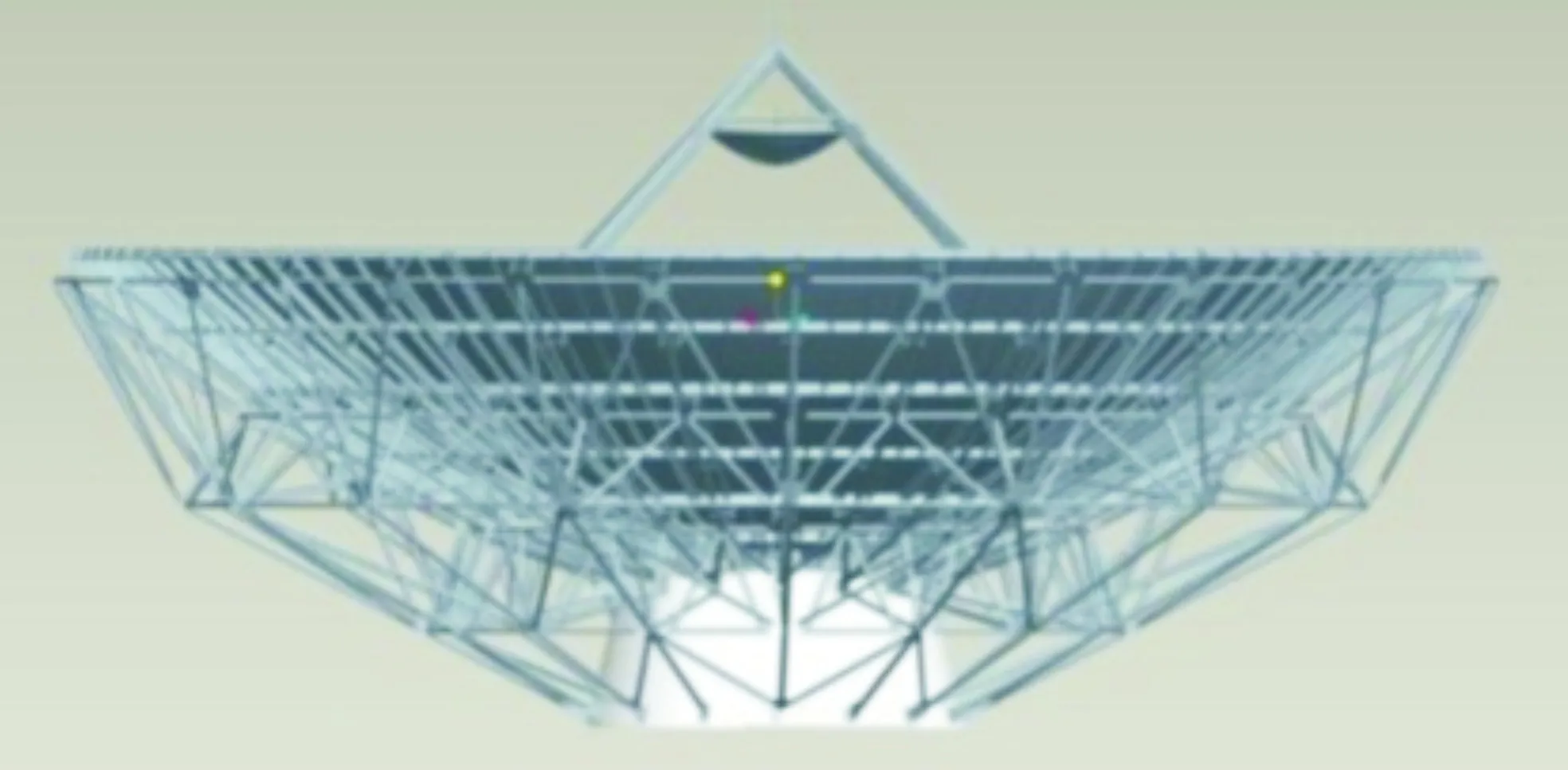
图1 12 m反射面天线反射体结构示意图
1.2.1 天线反射面
天线的主反射面是由抛物线绕其焦轴旋转而成的旋转对称面,综合考虑材料、制造工艺、总装调整等方面因素,把天线反射面在径向分为三环,在周向,内环反射面分为相同的16块扇形单元板,中环、外环分为相同的32块扇形单元板。整个天线的主反射面由80块反射面单元组成,单块反射面板采用碳纤维面板材质,见图2所示。
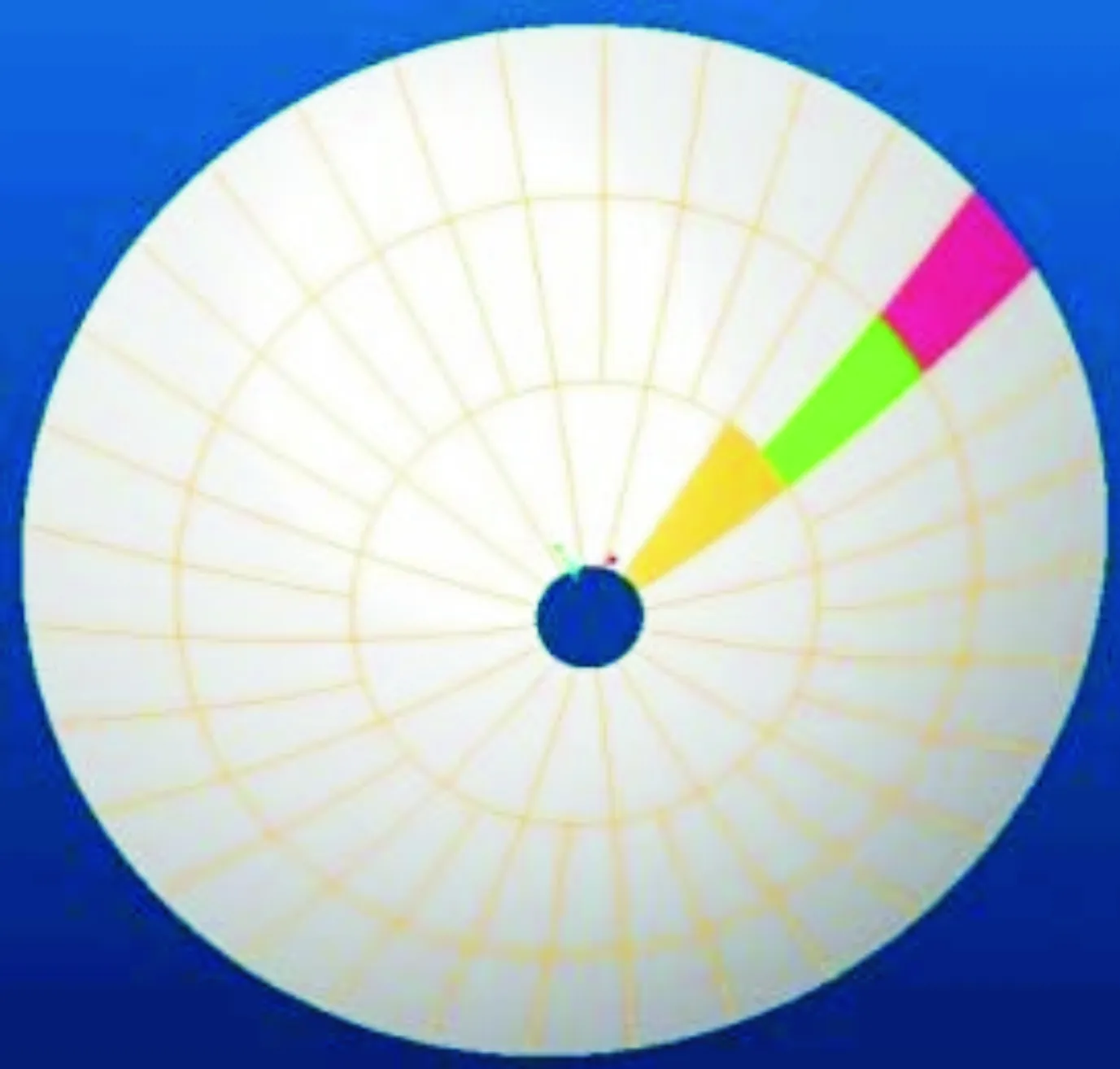
图2 天线反射面分块图
1.2.2 反射体骨架
反射体骨架由中心体、主辐射梁、副辐射梁、环向片桁架、环向拉杆、空间立杆和斜拉杆以及连接件组成,见图3所示。中心体上部与网络支撑固定组合,圆周与16个辐射梁连接,底面与天线座架固定连接。为满足冷却要求,在中心体底部增加了一入一出的排风风扇设计;中心体底板进行了排水孔设计,并将所有中心体内部的跟踪信道设备进行悬挂式安装,以增加设备的防水保护。

图3 天线反射体骨架示意图
1.2.3 副反射面
副反射面属整体结构,为保证副反射面精度,由数控车床加工而成,其精度均方根值小于等于0.15 mm。副反射面支撑机构由4根支杆和一个调整机构组成。
1.2.4 天线主面精度分析
反射面的表面精度要求与工作频率有关,工作频率越高,对表面精度要求就越高[2]。天线反射面的精度是以反射面上测量点的法向误差均方根值来表述的,这一误差由以下三方面产生[3]:
(1)反射面单元的制造及安装调整误差σ1,其精度均方根值可以达到0.12 m;
(2)反射面单元的安装时测量系统误差σ2(根据现有的检测方法及仪器精度,结合已完成工程的现场测试经验,此项误差均方根值可小于0.1 mm);
(3)结构在载荷作用下引起的变形误差σ3(不同工况下天线自重变形引起的反射面的调整点变形误差,该项误差均方根值为0.14 mm)。
按照式(1)计算反射面的精度均方根值,计算出σ=0.21 mm,因此天线刚度及强度满足设计要求。
(1)
1.2.5 天线座架的结构特征
天线在跟踪极轨卫星时,会出现卫星过顶的情况,要解决卫星过顶时目标不丢失,采用A-E二轴天线座下面增加倾斜轴的三轴天线座方案。这种方案可以实现过顶跟踪,结构简单紧凑,易于伺服控制。
天线座主要由倾斜部分、方位部分、俯仰部分组成。座架结构形式就是将A-E型座架装在一个倾斜的底座上,倾斜底座的倾斜角是固定的,倾斜角为7°。为了全方位跟踪,倾斜轴的倾斜方向是可以改变的。天线座主要由倾斜机构、方位机构、俯仰机构组成,整体结构如图4所示。

图4 天线座架整体结构示意图
由于天线的波束宽度较窄,天线方位轴、俯仰轴、倾斜轴均采用双电机驱动,并采用电消隙消除齿隙,以提高波束指向性能,实现天线系统对低轨遥感卫星的精确跟踪[4-5]。方位驱动链采用行星减速箱,结构尺寸较小,便于结构布局。天线方位最高转速为 20 °/s,方位与俯仰传动链采用相同的模式,末级采用齿轮传动。
1.3 传动链系统计算选型
1.3.1 载荷计算
(1)风载荷
迎风阻力:
FX=CX×A×Q。
(2)
横向阻力:
FY=CY×A×Q。
(3)
风力矩:
M0=CM×A×D×Q。
(4)

根据技术要求计算出工作状态下风力矩。按8级风20.7 m/s计算,考虑安全余量n=1.08,风载荷M风计算结果为100 440 N·m,折算到俯仰轴、倾斜轴的风力矩近似等于折算到方位轴的风力矩。
(2)惯性载荷
考虑双电机,
M惯=(J天线+2×J电机×i2)×ε。
(5)
惯性载荷计算结果如表1所示。
表1 惯性载荷计算结果
(3)摩擦载荷
摩擦载荷M摩计算结果为3 890 N·m。
(4)总载荷
计算公式如下:
M=(M风2+(M惯/21/2)2)1/2+M摩。
(6)
总载荷计算结果见表2。

表2 总载荷计算结果
1.3.2 传动链选型
电机功率计算公式如下:
P=n×M×ω/η。
(7)
取n=1.05,计算结果如表3所示。

表3 电机功率计算结果
电机转矩计算公式如下:
M电=M/(η×i)。
(8)
表4给出了计算结果。

表4 电机转矩计算结果
根据表3和表4的计算结果可进行电机选型。减速器输出转矩等于小齿轮承受最大转矩,根据表2的计算结果可进行减速器选型。
1.4 天线结构分系统的创新点
三轴12 m反射面天线结构分系统的创新点为高刚度天线结构技术,具体包括:
(1)增大天线座架的截面尺寸,方位底座采用双层结构,内加网状筋结构形式,提高整体座架的稳定性,通过合理优化加强筋的布局来增大天线座架的刚度;
(2)传动链的刚度设计,采用双驱动链的结构形式,消除齿隙回差,提高末级传动比,减小转动部分的转动惯量;选用高刚度、小惯量的行星减速器和驱动电机;采用零游隙的交叉滚子轴承的设计来增大天线的转动刚度。采用上述设计提高了整个传动链的刚度。
2 天线系统伺服设计
2.1 天线系统伺服特征
12 m反射面天线的天线控制子系统采用全数字化控制架构,基于软件实现控制逻辑和控制算法,通过数字化通信总线实现控制信号和控制命令的传输。
天线控制子系统主要由天线控制机柜和天线驱动机柜组成。天线控制机柜包括天线控制单元、键盘鼠标、显示器、位置编码单元、跟踪接收机等,天线驱动机柜主要包括驱动控制单元、本地显示控制单元、驱动器、电源、配电设备、安保设备等。天线控制子系统的设备原理如图5所示。

图5 伺服系统原理图
天线控制单元(Antenna Control Unit,ACU)设备主要由CPCI(Compact Peripheral Component Interconnect)总线工业控制计算机和相关接口CPCI总线标准板卡组成。天线驱动单元(Antenna Drive Unit,ADU)驱动设备选用标准的工业机柜,天线方位、俯仰和倾斜驱动系统采用双电机驱动、电消隙,采用高性能可编程计算机控制器(Programmable Computer Controller,PCC)作为天线驱动控制单元的多电机控制器。
天线轴角采集主要由方位、俯仰、倾斜高精度旋变、位置编码单元及连接电缆等组成。高精度旋变将与天线轴角变化相关的电信号通过电缆传输至位置编码单元,经解码处理最终形成实时角度数据,供给ACU闭环和显示使用。
为了克服传统伺服系统数字PID(Proportional Integral Differential)控制技术对于高动态、窄波束天线系统的低仰角捕获难度大、高仰角跟踪误差大的难题,本文提出了一种非线性多模自适应过顶跟踪控制技术,即在改进型的全数字PID控制算法基础上,根据系统误差将控制率分为非线性区(大误差区)和线性区(小误差区)分别控制,在低仰角降低了跟踪捕获时的超调,由传统超调量25%降低到10%以下,大大提高了天线系统跟踪捕获概率;在低仰角和高仰角采用根据目标卫星速度和加速度的动态自适应调整跟踪增益系数的方法,实现了天线系统对低轨道卫星的全空域稳定跟踪。该方法将天线过顶跟踪最大误差降低了30%以上。
在测控站没有标校塔,无法采用常规标校塔角度标校和跟踪校相的情况下,本文提出了一种基于太阳和动态目标卫星相结合的无塔标校设计方案。基于高精度星体位置预报、基于图像的脱靶量精密测量及最小二乘误差系数解算三大策略,开发了一套射电星标校软件,界面如图6所示。该软件采用十字扫描法和高斯拟合法实现对太阳的高精度角度标校,再利用跟踪低轨道卫星进行多圈次指向验证,标校精度优于0.01°,极大提高了天线的指向精度。

图6 射电星标校软件
为了解决测站操作人员定期校相的问题,本文在ACU软件中增加基于低轨道卫星的动态自适应快速校相功能模块。ACU软件根据固定卫星进行任务前自动检查跟踪相位和定向灵敏度,发现不满足任务要求,自动对低轨道卫星进行秒级的快速跟踪校相,保证了天线稳定过顶跟踪。动态自适应快速校相流程如图7所示。
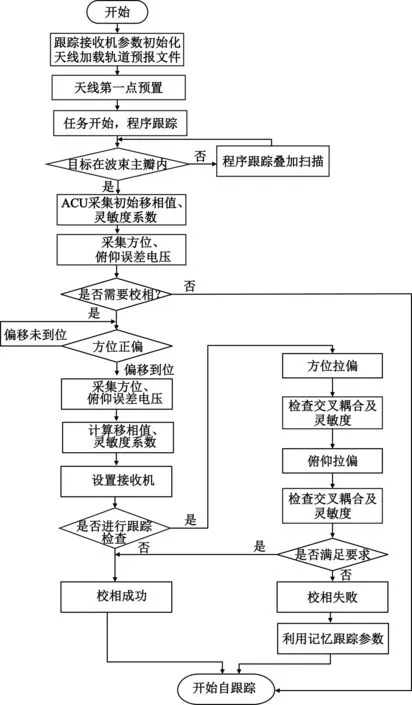
图7 动态自适应快速校相流程
2.2 天线伺服分系统的创新点
三轴12 m反射面天线伺服分系统的创新点为大动态、窄波束、高精度指向跟踪控制技术,具体包括:
(1)数字多环路控制技术——天线控制系统应采用位置环、速度环和电流环三闭环的全数字化控制策略,同时在位置环引入前馈补偿[6],使二阶无静差系统等效为三阶无静差系统,提高等效加速度误差常数,降低动态滞后误差;
(2)多模自适应高精度跟踪控制技术——充分利用天线系统中接收机跟踪误差数据、程序引导数据以及天线轴角编码数据等在空间或时间上互补特性,进行数据融合,产生比单一信息源更加准确的跟踪数据,实现了天线系统对低轨卫星的高精度稳定跟踪;
(3)基于低轨道卫星的快速跟踪校相技术——对低轨道卫星目标程序跟踪时,调整天线方位或俯仰角度(单轴可以完成快速校相),ACU采集跟踪电压,计算相移变化量,对跟踪接收机的相位和误差电压灵敏度系数自动修正,将跟踪校相时间由传统校相时间2 min减小到15 s以内,交叉耦合优于1/7。
3 有限元分析
基于Nastran/Patran有限元软件,对多种工况下的天线承载结构进行了刚度分析、强度分析、面型精度分析与结构固有频率等分析。在刚度、强度满足要求的前提下,便于进一步对天线结构进行优化。
3.1 有限元模型
基于天线反射体中的中心体、辐射梁采用钢结构制作,主反射面、副面和副面支撑采用碳纤维复合材料制作,可以有效减轻天线反射体的重量和降低转动惯量。
图8为天线0°状态的有限元模型,模型中包含壳单元、梁单元、质量元和多点约束。副面结构因构造较为复杂采用体单元外,其余板类型结构均采用壳单元,反射体背架以及副面支撑结构采用梁单元。天线共有方位-俯仰-倾斜三个驱动机构,在模型相应位置处释放了对应的旋转自由度并做等效处理,大齿轮和驱动机构简化为刚体进行计算。

图8 俯仰角0°时天线结构有限元模型
3.2 载荷与工况
仿真计算中考虑了天线的载荷包括自重载荷和风载荷,在设计阶段必须评估这些因素能给天线电性能带来的影响,并对结构设计形成指导,以保证天线系统的精度和效率[7-8]。
风力大小可由式(9)计算得出:
F=CFqA。
(9)

计算工况如下:
工况1:俯仰角0°时天线自重+20.8 m/s风速;
工况2:俯仰角45°时天线自重+20.8 m/s风速;
工况3:俯仰角90°时,天线自重+56 m/s风速。
在天线座与地面连接处施加约束,增加重力载荷,首先进行静力分析,然后分析天线整体谐振频率和振型。
3.3 结构静力分析
俯仰角0 °和45°时天线自重+20.8 m/s风速下的力学仿真结果见表5。

表5 俯仰角0 °和45°时的计算结果
俯仰角90°时,天线自重+56 m/s风速下的力学仿真结果如表6。

表6 天线俯仰角90°时的计算结果
经仿真分析,在仰角分别为0°、45°和90°时,天线系统在工作风速、重力变形的影响下,其最大均方根误差约为0.25 mm,最大变形为4.72 mm,满足结构刚度要求;天线系统在保全风载下,最大结构应力为144 MPa,小于材料屈服应力,满足结构强度要求。
3.4 结构模态分析
基于Nastran有限元分析软件,天线在俯仰角度分别为0°、45°和90°时天线承载结构的前两阶模态谐振频率值及相应振型如表7所示。

表7 各种工况下的天线谐振频率及振型结果
经仿真分析,天线系统整体结构的最小谐振频率约为5.54 Hz,满足设计要求。
4 系统测试验证
4.1 天线系统电气性能测试
对12 m反射面天线进行了装配测试,天线整体实物如图9所示。

图9 天线整体实物图
经过现场测试,天线系统的增益、噪声温度、第一旁瓣、差波束零深均满足性能设计要求。与伺服分系统配合,本文给出天线系统在典型频点下的仿真与测试方向图如图10和图11所示。

图10 12 m天线X频段(8.35 GHz)仿真及测试方向图

图11 12 m天线Ka频段(19.2 GHz)仿真及测试方向
4.2 天线系统跟踪性能测试
从仰角5°起开始跟踪,跟踪过程中方位俯仰误差曲线如图12所示。信号跟踪捕获后,跟踪的自动增益控制(Automatic Gain Control,AGC)如图13所示。由图12和图13可知跟踪过程中信号稳定,跟踪效果良好,达到了预期效果。

图12 自跟踪过程方位俯仰实际-理论误差曲线

图13 自跟踪过程AGC曲线
5 结 论
本文基于高码率低轨卫星测控对于三轴12 m反射面天线系统大动态、高精度、高刚度、窄波束过顶跟踪的实际需求,给出了一种新型三轴12 m高刚度天线结构及大动态伺服系统的设计思路:通过优化反射面结构型式、材料选择、力学分析提高了天线反射体的精度;通过天线座架驱动链路设计、刚度设计提高了天线系统的谐振频率;通过优化伺服控制与伺服选型设计提高了伺服跟踪控制性能。
研制的12 m反射面天线系统的主要技术创新点为高刚度天线结构设计技术、大动态窄波、高精度指向跟踪控制技术,解决了大口径天线大跨度、高精度、窄波束指向跟踪的难题。基于有限元分析软件,对12 m反射面天线进行了动静态特性分析,依据分析结果加工了12 m反射面天线实物并进行了现场电气测试及跟踪联试。测试结果表明,所加工的12 m反射面天线系统各项指标均能达到实际工程的要求,可以实现中低轨道卫星大动态、高精度窄波束稳定跟踪。