基于改进的DPC算法的ZDJ9转辙机异常数据挖掘
2022-05-27李智宇
李智宇
(北京全路通信信号研究设计院集团有限公司,北京 100070)
1 概述
ZDJ9型转辙机是为国内铁路提速的需求而研制的,具有转换力大、效率高等特点。既可用于多点牵引分动外锁闭道岔的转换,也可用于尖轨联动的内锁闭道岔转换,一般多用于客运专线,其缺陷与损害直接影响列车的安全可靠运行[1]。转辙机如果出现异常,很可能导致脱线、脱轨、追尾等重大事故,危及行车安全。目前,对转辙机的故障诊断主要依靠维护人员的理论知识和现场经验,故障识别时间较长、效率低且误判、漏判现象时有出现。因此,转辙机故障诊断具有十分重要的意义。
多年来,国内外的学者们在转辙机故障诊断方面进行一些研究,但都存在各自的优缺点。Eker OF等人把支持向量机方法应用于道岔故障诊断[2],关琼利用果蝇优化算法提高支持向量机方法的计算速度,完成道岔故障类型识别[3],但是支持向量机方法并不适用于多种故障的分类。Atamuradov V等人构建了专家系统,能够识别道岔是否正常运行以及两种类型的故障[4],张智等人将专家系统应用于电液转辙机故障诊断[5]。专家系统的局限性在于转辙机的工作条件千差万别,导致故障模式和故障原因多样,专家经验很难全面地将所有故障进行归纳总结。与专家系统相比,基于神经网络的故障诊断具有学习能力,无需构造完善的先验知识库,如Chen J和李雅美等人建立了基于模糊神经网络的道岔故障识别系统[6-7],但这种方法需要大量的训练样本进行学习才能获取良好的故障诊断结果,而道岔故障类型多样,大大延长学习时间。为提高故障诊断速度,肖蒙和王林洁等人将贝叶斯网络应用于转辙机故障诊断,基于粗糙集约简的思想,对属性进行约简,从而简化贝叶斯网络结构,减少算法的复杂性,提升计算速度[8-9],这一方法的缺点在于需要确定适当的先验概率,然而先验概率很难确定。刘新发和李孟澜等人将聚类分析方法用于转辙机故障诊断,可以同时识别多种故障[10]。聚类分析为无监督学习方法,不需要提前训练模型,但是现有的绝大部分聚类分析方法,需要提前给定分类数,对于实际工况下的数据,具体分几类很难提前确定。
鉴于以上研究现状,本文针对ZDJ9转辙机动作电流数据的特点提出一种改进的DPC聚类分析算法来识别异常数据。本文的主要贡献:1)与一些经典的聚类分析方法(如K-means方法、基于层次的聚类分析方法、模糊聚类分析方法)相比,本文提出的算法可以自动分类,不需要提前设定分类数目,需要提前确定的参数难度相对较小;2)与传统的DPC算法相比,对于现场运行的ZDJ9转辙机动作电流数据而言,本文提出改进的DPC算法更容易识别异常数据,运算速度更快;3)本文提出的DPC算法简洁明快,能够识别各种形状的类簇。
2 转辙机动作电流曲线分析
ZDJ9型道岔的电动机采用交流三相电源,道岔的正常转换过程:解锁-转换-锁闭,相应的动作电流曲线可分为:解锁区-转换区-锁闭区-缓放区,如图1所示。

图1 ZDJ9转辙机正常动作电流曲线Fig.1 Normal action current curve of ZDJ9 switch machine
T1(解锁区):道岔启动电流较大,完成道岔解锁过程。在此过程中,电机刚启动时,有一个很大的启动电流,同时产生较大的转矩,道岔进入解锁状态,经齿轮组及摩擦联结器使滚珠丝向顺(逆)时针方向旋转,从而使滚珠丝杠上的螺母向左(右)侧运动,转辙机动作杆带动锁闭杆运动,直到实现外锁闭装置解锁,但尖轨不动,此刻电机负载很小,电流曲线迅速回落,道岔进入转换过程。
T2(动作区):该时段为道岔的转换过程。在这个过程中滚珠丝杠上的推板套继续运动,从而带动尖轨运动。如果动作电流平滑,表明转换阻力小;如果动作电流略微增大,表明转换阻力大,交流转辙机很难从电流大小判断转换阻力的大小。
T3(锁闭区):此时道岔进入锁闭过程。这一过程为道岔尖轨被带动到另一侧,尖轨与基本轨密贴,内锁闭块弹出,切断动作电路。其动作电流曲线为尾部平滑迅速下降。
T4(缓放区):第4时段为1DQJ(第1道岔启动继电器)缓放的阶段。道岔转换完毕,速动开关组中的接点转换到规定位置,断开启动电路,1DQJ自闭电路断开进入缓放状态。在1DQJ缓放时间内,启动电路中X1线缆仍有电流,这是由于道岔到位后自动接点接通室外的表示电路,此时1DQJ还在缓放中,ZDJ9转辙机电源380 V还在向外输电,X1线缆经室外表示电路沟通回路,从而产生电流。此时的“小台阶”长短取决于1DQJ的缓放时间,电流值大小取决于表示回路电阻,一般为0.5 A左右。
3 DPC算法转辙机异常数据挖掘方法
3.1 数据特征提取
转辙机一次动作所采集的动作电流数据点的个数为5 000多个,若把采集到的动作电流数据直接作为数据集进行分类,将加大计算复杂程度,延长计算时间。因此,首先对动作电流数据进行特征提取,降低数据维度。针对ZDJ9转辙机转换时动作电流数据的特点,根据经验选取初值、终值、最大值、转换时间作为特征参数,这样就大大降低了运算量。
3.2 特征数据归一化
不同的特征指标有不同的量纲或者不同的量级,这样的情况会影响到数据分析的结果,为了消除指标之间的量纲影响,需要进行数据标准化处理,以解决指标之间的可比性。原始数据经过归一化处理后,各指标处于同一数量级,适合进行综合对比评价。本文采用离差标准化方法,对原始数据进行线性变换,使结果值映射到[0,1]之间,转换函数如公式(1)所示。其中,x为原始数据,xmax为数据集中最大值,xmin为最小值,x*为归一化后的值。

3.3 改进的DPC算法
本文算法是在传统的DPC算法基础上改进后提出的,把局部密度大的点作为聚类中心,可以自行得出聚类数目,适用于各种形状的类簇。鉴于现场运行的ZDJ9转辙机动作电流数据具有特征值集中的特点,认为在数据集中,聚类中心在其所处的位置局部密度最大,它周围围绕着的数据点的局部密度均低于聚类中心自身的局部密度,且这些围绕着局部密度较低的数据点距离其他的拥有高局部密度的聚类中心较远。该算法需要计算两个量,局部密度ρi和距离δi,计算公式如公式(2)所示。

其中,dij表示第i个数据点和第j个数据点间的距离,本文使用的是欧式距离。dc为截断距离,局部密度ρi表示第i个数据点周围与其距离小于dc的数据点个数。距离δi表示与第i个数据点间的距离最小的、局部密度大于它的数据点的距离。对于自身局部密度最大的数据点,同时拥有较大局部密度ρi和较大距离δi的数据点,就是聚类中心点,而对于局部密度ρi较小,距离δi却较大的异常点,将其分为一类。改进的DPC算法具体过程如表1所示。
如表1所示,改进的DPC算法和传统的DPC算法的区别在于第5步对局部密度ρi较小、距离δi较大点的处理。传统的DPC方法将这样的点分配给比它们局部密度大的最近聚类中心所在的类簇中,
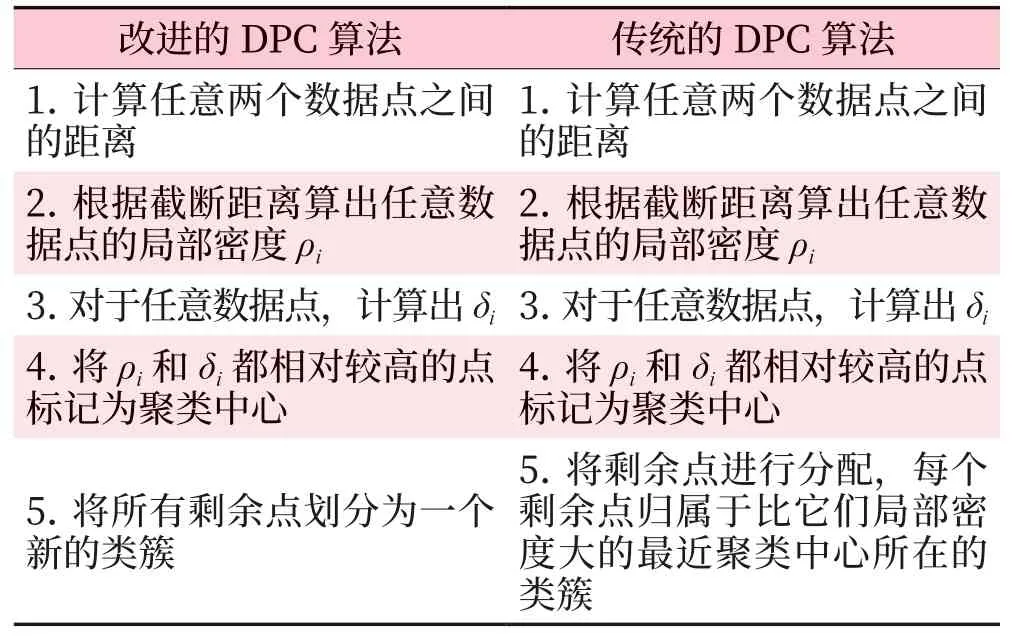
表1 两种DPC算法Tab.1 Two kinds of DPC algorithms
本文提出的算法则将所有的这些异常点划分为新的一个类簇。与传统的DPC算法相比,本文提出算法的优势:1)能够更准确的识别故障。这是由于对现场运行的转辙机,绝大部分情况下在正常运行,所以,采集到的动作电流数据的特征值大多聚集在聚类中心附近。而局部密度ρi较小、距离δi较大的数据点,往往对应运行异常的情况。因此,利用本文提出的算法,可以更准确的识别异常数据。2)运算速度更快。因为算法进行到第5步后,利用本文提出的算法,不需要为剩余每个点寻找自身的类簇,因此,相比于传统的DPC算法,本文提出的算法运算速度更快。
4 实验验证及结果分析
选取中国北方某客运站某台ZDJ9转辙机3 400次道岔转换的动作电流数据为实验数据,来验证算法的可行性。
如图2所示,为确保采集动作电流数据的完整性,现场采集动作电流数据往往从转换前一段时间开始至转换完成一段时间后结束,每组数据采集5 300多个电流值,所以首先需要找到每组数据的转换起始点和结束点,提取整个转换过程的数据,通过这种方式还找出138组传感器调试阶段采集不完整的数据,如图3所示。

图2 ZDJ9转辙机现场采集动作电流曲线Fig.2 Site acquired action current curve of ZDJ9 switch machine

图3 ZDJ9转辙机现场采集不完整动作电流曲线Fig.3 Site acquired incomplete action current curve of ZDJ9 switch machine
利用前面提出的数据挖掘方法处理剩余的3 262组数据。首先对每组转换数据分别选取初值、终值、转换时间、最大值作为其特征值,这样就达到了降维的目的;然后,根据公式(1)对特征数据进行归一化处理;最后利用改进的DPC算法对数据进行分类,如图4所示,数据被分为3类。

图4 改进的DPC算法分类结果Fig.4 Improved DPC algorithm classification result
其中,第1类包含3 048组数据,为属于正常数据,其动作电流曲线如图5所示;第2类包含213组数据,为传感器调试初期的数据,其动作电流曲线如图6所示,与正常数据相比这类数据在解锁区电流曲线没有明显回落;第3类只有一组数据,其动作电流曲线如图7所示,可以发现,与正常数据相比,电流最大值较大,在解锁区电流增大和回落更明显,转换时间较短。

图5 第一类动作电流曲线Fig.5 The first type of action current curve

图6 第二类动作电流曲线Fig.6 The second type of action current curve

图7 第三类动作电流曲线Fig.7 The third type of action current curve
为与传统的DPC算法进行对比,用传统的DPC算法对以上数据进行分类,分类结果如图8所示。可以发现,利用传统的DPC算法,异常数据与正常数据分为一类,而利用本文提出的算法,可以更好的识别异常数据。
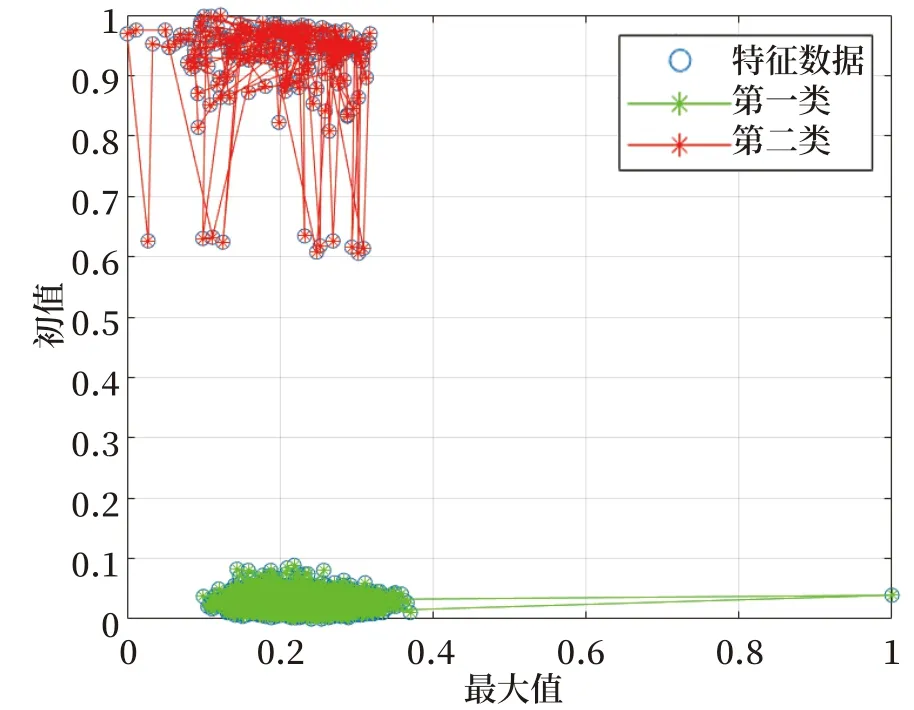
图8 传统DPC算法分类结果Fig.8 Traditional DPC algorithm classification result
5 结论
本文针对ZDJ9转辙机故障诊断智能化不足的现状,根据ZDJ9转辙机动作电流数据特点,提出一种改进的DPC异常数据挖掘方法。通过利用该算法对现场试验数据的处理,实现了对数据的合理分类和异常数据的准确识别,验证了该算法的可行性和有效性。但由于现场实际工况较为复杂,造成异常的原因存在多样性和不确定性,故障模式与分类算法的映射关系有待进一步研究,这也是下一步的工作研究重点。
