基于动态自由能磁滞模型的GMM-FBG电流传感器磁滞建模与参数辨识
2022-05-26滕峰成杨雪璠吕登岩叶文昊
滕峰成, 杨雪璠, 吕登岩, 叶文昊
(燕山大学 电气工程学院,河北 秦皇岛 066004)
1 引 言
智能电网技术的应运而生,对用电设备的安全监测提出了更高的要求。传感器技术在电网中的应用为系统状态分析和辅助决策提供术了技术支持[1]。基于超磁致伸缩材料(giant magnetostrictive material, GMM)的光纤布拉格光栅(fiber Bragg grating, FBG)电流传感器已成为电流检测的热门选择[2]。光纤布拉格光栅(FBG)具有本体不带电,抗电磁干扰能力强,传输距离远等优点[3,4],将其与超磁致伸缩材料(GMM)组合在一起,充分利用了GMM伸缩系数大,高可控性和频率特性好的特点[5]。但其中核心材料GMM存在固有的磁滞非线性和涡流损失特性,使得GMM-FBG电流传感器的测量精度出现较大误差[6]。为此需要对GMM材料的磁滞过程进行建模分析,基于该磁滞模型对传感系统建模补偿[7]。
常用的磁滞模型有基于纯数学理论的Preisach模型[8];描述铁磁性材料内部磁畴特性的J-A模型[9];以神经元的数学模型为基础来描述磁滞过程的神经网络模型[10];还有由Smith提出的自由能模型,该模型是基于GMM材料内部的Helmholtz-Gibbs自由能关系来建立的,具有模型简单、参数少的优点[11]。经典的自由能模型未考虑涡流损失,适用于准静态状态。但工频下传感器测得的电流会出现误差,为解决这一问题,本文提出了一种动态自由能模型,该模型将磁化强度模型耦合超磁滞伸缩棒的等效涡流损失模型,使模型能够更加精确地描述磁滞过程。进行传感器测量实验时,应用动态磁滞模型对传感系统进行补偿控制,提高传感器的测量精度。
2 GMM-FBG电流传感器模型
GMM-FBG电流传感器的核心元件是超磁致伸缩材料(GMM)和光纤布拉格光栅(FBG),利用超磁致伸缩材料的磁滞伸缩效应,当待测电流通入传感器中的螺线管时,置于螺线管中的GMM材料会在感应磁场的作用下产生应变,导致黏合在GMM材料表面的FBG的中心波长产生相应的应变,分析波长变化量从而达到测量电流的目的[12]。传感器如图1所示,由激磁线圈、超磁致伸缩棒、光纤光栅构成。

图1 GMM-FBG电流传感器模型
根据电流磁效应,不考虑漏磁的情况下,被测电流通过传感器的线圈时,产生的驱动磁场H为:
H=NIsin(2π f t+φ)+Hb
(1)
式中:N是单位长度匝数;I是激磁电流幅值;f是驱动频率;Hb是偏置磁场强度;φ是初相。
在感应磁场的作用下,其磁化强度M可表示为:
(2)
式中: μ0是真空磁导率;B为磁感应强度。
根据磁滞伸缩效应,考虑GMM固有的磁滞非线性和预应力的影响,超磁致伸缩棒在驱动磁场中产生的应变量ε为[13]:
(3)
式中:ΔL为棒的伸长量;L为棒的长度;σ为外加预应力;EH为固定磁场强度下的杨氏模量;λs为饱和磁致伸缩系数;Ms为饱和磁化强度。
忽略温度的影响,只考虑应力的作用,根据光纤的弹光效应,FBG中心波长变化量ΔλB与应变量Δε之间的关系为:

(4)
式中:Pe是有效弹光系数;Δε为超磁致伸缩棒应变量。
在利用超磁致伸缩材料测量电流时,磁场强度随电流变化,磁感应强度的变化总是滞后于线圈电流一定的角度,即磁感应强度与磁场强度之间存在磁滞现象,另外超磁致伸缩棒在反复伸缩过程中会产生磁滞损耗,两者的共同作用使得传感器的输入与输出之间也存在非线性,输出信号不能完全反应被测信号的信息,引起测量误差。为消除磁滞非线性的影响,需要更精确地描述磁化强度与磁场强度之间的关系模型,对传感系统进行建模补偿来提高传感器测量精度[14]。
3 动态自由能磁滞模型
3.1 自由能磁滞模型
自由能磁滞模型是基于超磁致伸缩材料内部Helmholtz和Gibbs自由能关系来建立的。在外加磁场强度的作用下,材料内部磁矩重新排列,导致自由能变化,从而产生磁化强度。根据超磁致伸缩材料内部磁畴的Helmholtz和Gibbs自由能的近似关系,假设材料均匀,得到局部磁化强度模型,又因为GMM材料内部晶体结构的非均匀性符合统计学分布扩展到材料的非均匀有效场,推出整个GMM材料的磁场强度H和磁化强度M之间的磁滞非线性关系模型[15]。

(5)
并且,ψ关于e取最小时达到热动力平衡,即

(6)
根据统计学,在3个平衡态附近,势能的一阶近似为二次方行为。则Helmholtz自由能可以用分段的二次行为表示:
(7)
式中:MI为Helmholtz自由能产生拐点时产生的磁化强度;MR为Helmholtz自由能达到最小时磁化强度;η为磁矩旋转达到平衡状态后的斜率。
由式(5)可得,Gibbs自由能可表示为:
G(H,M,T)=ψ(M,T)-HM
(8)
假设材料均匀,有效场He=应用场H,即外加磁场。定性分析磁矩旋转后的平衡行为,即求解平衡条件:

(9)
(10)
(11)

(12)
τ(t)={t∈(0,tf]|H(t)=-Hc或H(t)=Hc}
(13)
式中tf为磁化时间。

(14)

经典自由能模型由于未考虑涡流损失的影响,只适用于静态条件下,为提高模型在工频下的预测精度,构造涡流损失模型,设计动态自由能模型。
3.2 动态自由能磁滞模型
动态自由能模型考虑了GMM棒的涡流损失,通过等效电阻的方法来构造等效涡流损失模型。假设平行于超磁致伸缩棒放置一电阻Reddy,I是输入电流,I1是通过感应线圈的电流,如图2所示:

图2 涡流损失等效图
V=(I-I1)Reddy
(15)
则:
(16)
由式(2)得:B=μ0(H+M),又磁场强度H与I1存在如下关系:
H=c0I1
(17)
式中c0是线圈因子。经整理可得涡流损失方程:
(18)
综上所述,动态自由能磁滞模型由自由能磁滞模型耦合一常微分方程组成,可表示为:

(19)

4 参数辨识
4.1 非线性遗传算法
由于非线性函数fmincon局部搜索能力强,全局搜索能力弱;遗传算法全局搜索能力强,局部搜索能力弱,所以将非线性算法与遗传算法结合起来,能得到问题的最优解[16,17]。非线性遗传算法参数辨识流程如图3所示,图3中M为种群个体数目。

图3 非线性遗传算法流程图
4.2 适应度函数
根据最小二乘法,采用离散时间N代替连续时间t,假设适应度函数为:
(20)
式中:y(i)表示实测量;ymodel(i)表示模型计算量。
4.3 算法参数影响的分析
在遗传算法中,因为种群数目m、交叉率p1、变异率p2、进化代数T对算法精度、速度均有影响。因此,需要分析各参数对算法的影响。
4.3.1 种群数目m对算法的影响
令T=300,p1=0.9,p2=0.09。取不同的m值,取模拟曲线和实验曲线最大误差cmax的平均值,算法结果如表1所示。

表1 种群数目m的影响
从算法运行结果看:种群数目m在预定范围内变化时,算法的计算精度在种群数目大于200后趋于平稳,因此,选择m=200作为算法的运行参数。
4.3.2 进化代数T对算法的影响
令m=200,p1=0.9,p2=0.09。取不同的T值,取模拟曲线和实验曲线最大误差cmax的平均值,算法结果如表2所示。

表2 进化代数T的影响
从算法运行结果可知:种群数目T在预定范围内变化时,算法的计算精度在进化代数大于250时候基本不变,综合考虑,可取算法运行代数T=300作为算法运行参数。
4.3.3 交叉率p1对算法的影响
令m=200,T=300,p2=0.09,取不同的p1值,取模拟曲线和实验曲线最大误差cmax的平均值,算法结果如表3所示。

表3 交叉率p1的影响
从算法运行结果可知:交叉率p1在预定范围内变化时,在0.8~0.9区间时,最大误差基本不变,所以,交叉率p1的优化取值区间为0.8~0.9。
4.3.4 变异率p2对算法的影响
令m=200,T=300,p1=0.85,取不同的p2值,取模拟曲线和实验曲线最大误差cmax的平均值,算法结果如表4所示。

表4 变异率p2的影响
从算法运行结果可知:交叉率p2在预定范围内变化时,在0.08~0.10区间时,最大误差最小,所以,交叉率p2的优化取值区间为0.08~0.10。
4.3.5 交叉率p1和变异率p2的曲线拟合
上述分析了交叉率和变异率对算法的影响,得到了交叉率和变异率的优化取值区间:p1=0.8~0.9、p2=0.08~0.10。下面将用所提到的交叉率与变异率曲线拟合方法,对交叉率和变异率在优化区间内进行曲线拟合。
令m=200,T=300,p1=0.8~0.9,p2=0.08~0.10。对每一组的m、T、p1、p2值,算法运行10次,计算得到的交叉率p1和变异率p2的优化数据组合如表5所示。

表5 p1和p2优化组合数据表
对交叉率和变异率在优化区间内进行了曲线拟合,如图4所示,式(21)为曲线拟合方程,曲线拟合度为0.992 4。

图4 p1和p2的最佳组合的曲线拟合
(21)
4.3.6 参数辨识结果
上述结算得到算法的最佳参数组合为:m=200,T=300,p1=0.84,p2=0.92。
非线性遗传算法的适应度曲线如图5所示。

图5 适应度曲线图
经过非线性遗传算法的优化,模型的参数辨识结果如表6所示。

表6 模型参数辨识结果表
该模型未考虑涡流损失,适用于准静态状态下,为验证模型有效性,我们对模型进行仿真测试,励磁电流从0逐渐增加到1.5 A,再逐渐减小到0,得到优化后的磁滞回线。结果如图6所示。从图6可以看出模型输出能够较好地吻合实测数据值。

图6 模型仿真与实验对比图
图7为误差分析图,可以得出模型误差小于2.5%。
4.4 参数Reddy的计算
已知ρ=5.8×10-7Ω/m,a=0,b=5 mm,L=4.7×10-2m,超磁滞伸缩棒的等效电阻Reddy为:
(22)
式中:ρ为磁滞伸缩材料的电阻系数;b和a是磁滞伸缩棒的外径和内径。
由此可得Reddy=60Ω。
5 实验及结果分析
搭建GMM-FBG电流传感器实验平台,验证动态自由能磁滞模型的有效性,如图8所示。其中,交流驱动提供频率和功率可调的交流电流产生励磁磁场,直流线圈提供偏置磁场用来消除倍频现象,解调仪测量光纤光栅中心波长。
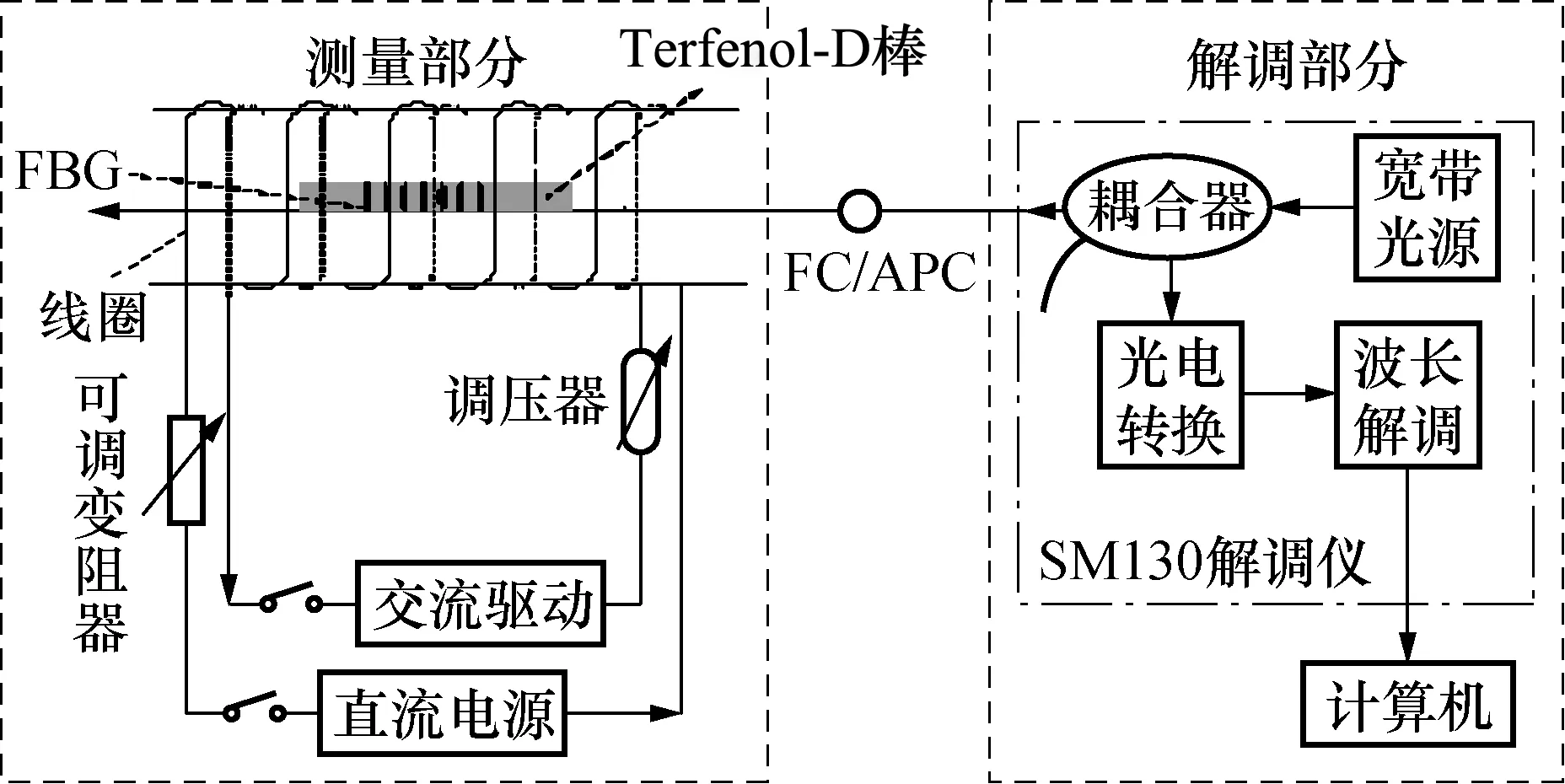
图8 GMM-FBG交流传感试验台示意图
实验中采用的超磁滞伸缩材料为长47 mm、直径5 mm的Terfenol-D棒,其饱和磁致伸缩系数为1.263×10-3。所选的光纤光栅材料半功率谱宽0.2 nm,峰值反射率为95%。将FBG用环氧树脂胶粘贴在GMM棒上[18]。对GMM棒施加10 MPa预应力,用隔热材料包裹住GMM棒,减小温度对实验的影响。
调节交流驱动与直流电源,给励磁线圈通入大小为3 A的工频正弦交流电流,给直流线圈通入4 A的直流电流,计算机同步录入工频交流电流输入信号与波长输出信号,如图9所示。在偏置磁场大于励磁磁场的影响下,输出波长能够较好地跟随输入电流信号同频率、同幅值波动。同时,可以观察到,输出波长信号对比输入电流信号上窄下宽,这说明了超磁滞伸缩材料存在磁滞非线性。

图9 电流与波长对比图
保持偏置磁场不变,分别在10 Hz和50 Hz频率下,给励磁线圈通入幅值为3 A的交流电流,得到实际测量的滞回曲线和模型预测曲线,如图10所示。
从图10可以看出,随着频率的升高,磁滞环变宽,这是因为涡流损失随频率升高变严重,这说明动态自由能磁滞模型是合理的。同时,模型预测图形与实际测量图形能够较好的吻合,验证了动态磁滞模型性能良好。
为解决GMM-FBG电流传感器在测量过程中,磁滞非线性和涡流损失带来的误差,利用上述研究过程中发现的磁滞规律,对GMM传感特性进行补偿控制,具体流程如图11所示。其中:ε为误差精度;ΔI为电流修正量;λ为实际测量波长;λ′为模型预测波长。

图11 补偿控制流程图
经过补偿控制得到一个周期内在正弦交流电流励磁作用下实际测量波长与模型预测波长的对比,如图12所示。

图12 模型预测波长与实际测量波长对比图
对比两个波形得到误差分析图,如图13所示,补偿后,系统误差在3.6%以内,电流测量灵敏度达到0.069 nm/A。
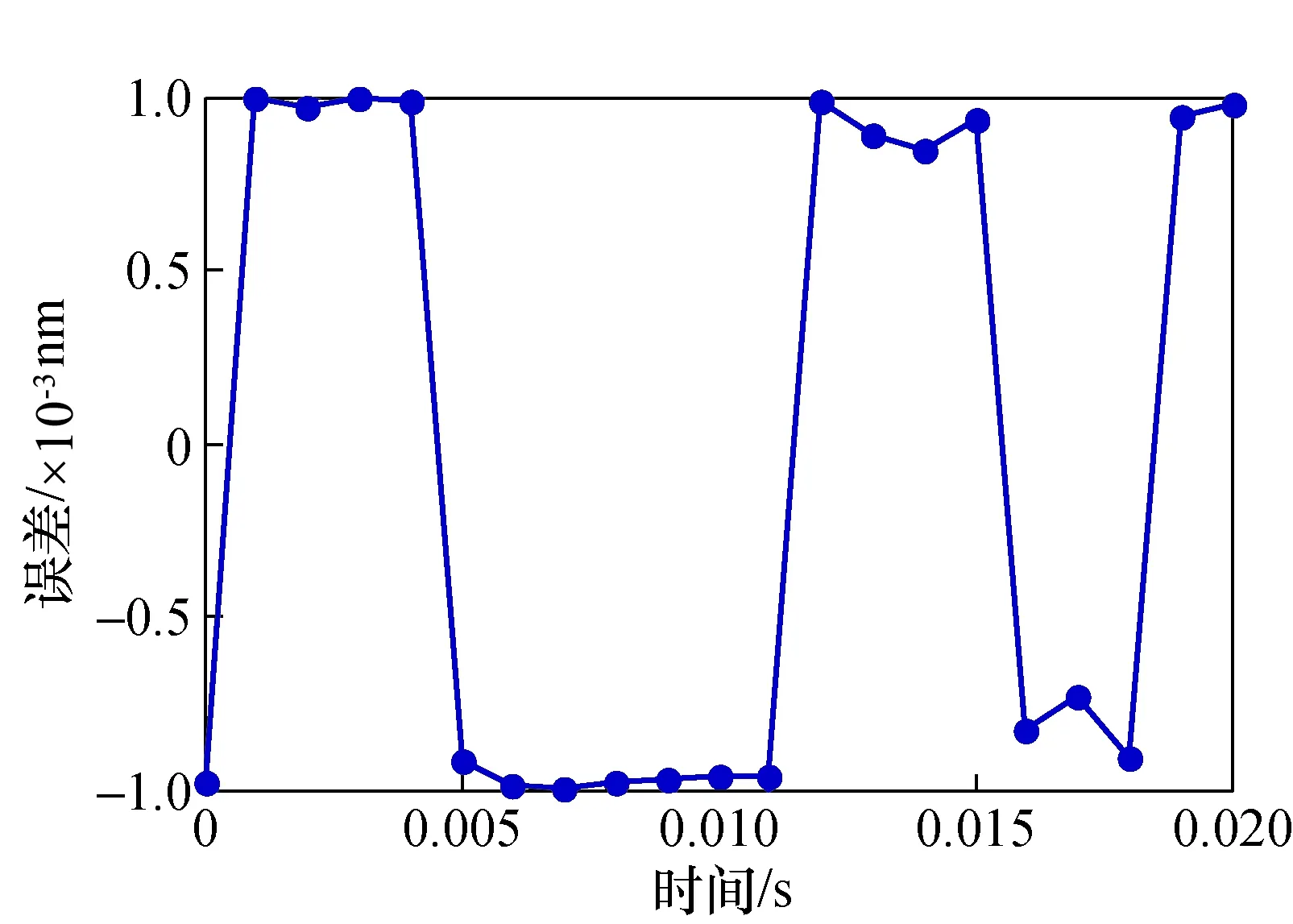
图13 误差图
5 结 论
基于动态自由能磁滞模型的补偿控制不仅解决了GMM-FBG交流电流传感器在测量过程由于磁滞非线性带来的误差,还解决了磁性材料涡流损失带来的误差,提高了传感器在工频下的测量精度。经过动态自由能磁滞模型的补偿控制,GMM-FBG电流传感系统电流灵敏度可达到0.069 nm/A,测量精度误差在3.6%以内。
