基于阈值增量的动态眩光测量方法
2022-05-26王嘉明乔卫东
王嘉明, 乔卫东, 张 恒, 李 奕
(1.西安理工大学 机械与精密仪器工程学院,陕西 西安 710048;2.陕西省计量科学研究院 光学计量测试中心,陕西 西安 710065)
1 引 言
眩光是影响道路交通安全的因素之一。眩光按照影响程度分为不舒适眩光和失能眩光[1~8]。失能眩光会使人眼在一瞬间产生视觉障碍,导致驾驶者在某一瞬间看不清前方的人员和车辆,增加了驾驶者对复杂交通情况的判断时间,从而增大交通事故发生的概率。而在实际道路交通中,道路光环境对驾驶员造成的失能眩光大多数为动态眩光。如交通监控补光灯,其照明方式一般为爆闪、频闪和常亮,随着驾驶员与光源的相对位置的变化,光源造成的失能眩光也在实时变化。
目前国内外对动态眩光测量的报道较少,现有文献主要集中于静态眩光测量方法以及动态图像获取方法。
在静态眩光测量方面,陈仲林等[9]利用数码相机测量道路照明亮度分布方法进行研究;钱伟等[10]在分析传统道路布点方法缺点的基础上,提出一种新型的道路照明亮度测量方法;沈天行等[11]研发的SM数字图像光环境测试系统,获取图像光环境参数。动态图像获取方法方面,如多靶面光合成[12~14]、单像素集成多个感光单元[15]、自适应像素曝光[16,17]、SVE(spatially varying pixel exposures)[17]、Digtial micro mirror阵列技术[18]、光学衰减器法、CMOS对数变换法[19]。不管基于哪种原理,其设备的制作都处于研究阶段,尚未有产品化的专用设备。
因此针对国内外研究现状及目前其检测方法中存在的问题,本文提出一种基于阈值增量的动态眩光测量方法,将视觉测量及数字图像处理的方法应用于动态眩光测量系统,通过降低图像的获取、存储、处理及结果计算时间,提高整个系统的处理效率,实现对道路交通动态眩光的测量。
2 动态眩光测量原理
2.1 阈值增量TI
阈值增量(TI)是国际照明委员会(CIE)推荐使用的户外道路照明眩光评价指标。TI是指当出现眩光源时,为了达到相同良好的视看条件,物体与背景之间对比度需要提高的百分比,根据《CIE 88: 2014 Guide for the lighting of road tunnels and underpasses》,定义公式[8]:
(1)
式中:
其中,Lav是路面的背景亮度,cd/m2;Lv是初始等效光幕亮度,cd/m2;Lv,k是第k个眩光源产生的初始等效光幕亮度,cd/m2;n是考虑的眩光源数量;Lk为第k个眩光源的亮度值,cd/m2;Sk为第k个眩光源的发光面积,m2;Rk、Tk、Hk为观察者与眩光源之间的相对位置坐标,m;Ek是第k个眩光源在观察者眼睛的中心照度,lx;θk是视线与眩光源至观察者眼睛连线的角度,(°);A是观察者的年龄。
在实际的道路照明中,驾驶员所处的光环境多为动态场景。如随着驾驶速度的不同,周围的路灯会以不同的频率在驾驶员的视野中呈现闪烁的状态;交通监控的补光灯会出现爆闪的状态;夜晚行车会车时,对面汽车的探照灯也会呈现闪烁状态。在基础理论上,静态和动态眩光测量系统的基础计算原理都依据于阈值增量,但静态眩光测量系统只能针对单一的、静止不动的静态场景,不能处理多变的、实时性的动态场景。而动态眩光测量系统通过缩短整个测量过程的测量时间,提高了测量效率,进而能够实现多变化的动态场景的眩光测量。
2.2 动态眩光测量系统
根据上述阈值增量的计算原理,同时分析现阶段已有的静态成像式眩光测量系统,本文建立的动态眩光测量系统框图如图1所示。

图1 动态眩光测量系统框图
整个系统由图像采集模块、图像传输模块、图像处理及计算模块和数据存储模块。图像采集器实时采集现场图像信息,同时对每帧图像进行AD转换和编码处理;处理之后的数据进行传输放入内存中;微型计算机将内存中的数据进行亮度和位置信息提取处理,同时进行阈值增量的公式运算,实时输出数据至终端显示;最后再将计算结果写入硬盘进行存储。
3 图像处理与眩光计算
分析公式(1)阈值增量的计算过程,可以得出影响TI值变化的基础分量,可以分为两类:与亮度信息相关的眩光源亮度值Lk和背景亮度值Lav;与位置信息相关的Rk、Tk、Hk相对坐标及眩光源尺寸面积Sk。因此通过图像处理,获取图像中相关的亮度和位置信息即可计算出TI值。
3.1 图像亮度信息获取
根据光学成像理论可知,相机获取图像的曝光量H与相机的像面照度E0存在关系式[20]:
H=E0·Tb
(2)
式中:
其中,Tb为相机获取图像时的曝光时间ms;τ为相机物镜的透射率;F为相机光圈大小;L为所拍摄目标物的亮度,cd/m2。
假设相机线性区域的线性关系式[21]为
D=f(lgH)
(3)
式中:D为灰度值;H为曝光量。
(4)
综上可知,只需对相机进行亮度标定获得相机的感光特性曲线,就可利用该曲线中的线性区域求得D所对应的H,进而由H求得实际环境亮度L。
本文采用Labsphere积分球均匀光源,规格型号为USLR-D08L-NMNN、恒流电源以及CS-2000A光谱辐射亮度计组成亮度标定系统对相机进行标定,标定光路图如图2所示。
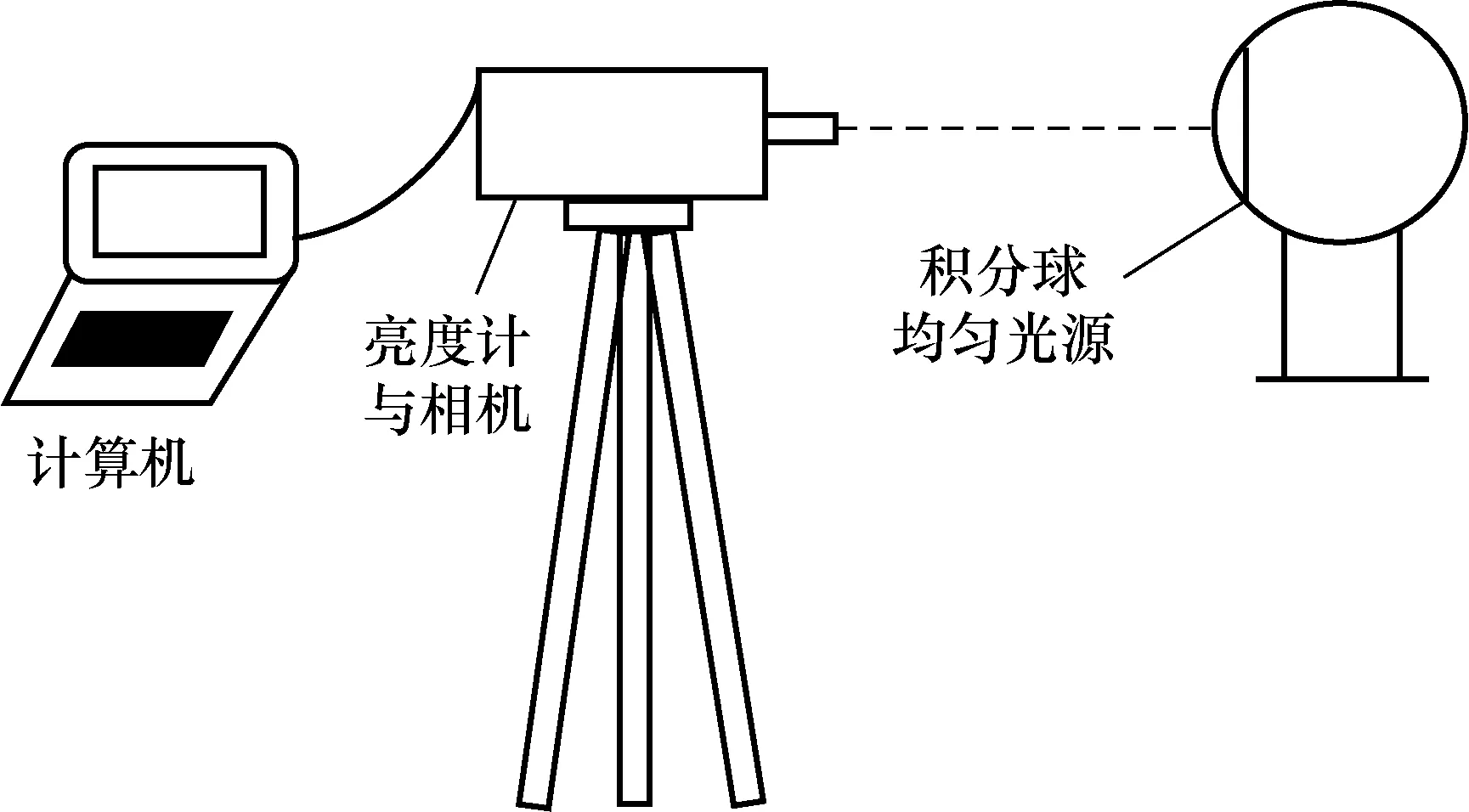
图2 亮度实验标定光路图
在标定实验时,整个实验室环境要求尽可能密闭,应当最大可能的减少任何杂散光,使得相机所获取的光信息全部是由均匀光源发出的。搭建好实验平台后,固定相机光圈参数不变,只改变相机的曝光时间,使积分球亮度源的亮度值保持不变,对其进行多次拍摄,提取每幅图像的灰度值D,然后利用公式(4)和标定时亮度源的亮度值计算每幅图像所对应的曝光量H,再对D和 lgH进行数据拟合就可获取当前亮度下曝光量与图像灰度的关系。图3为本文标定系统下所获得的图像灰度值与曝光量关系的变化曲线。
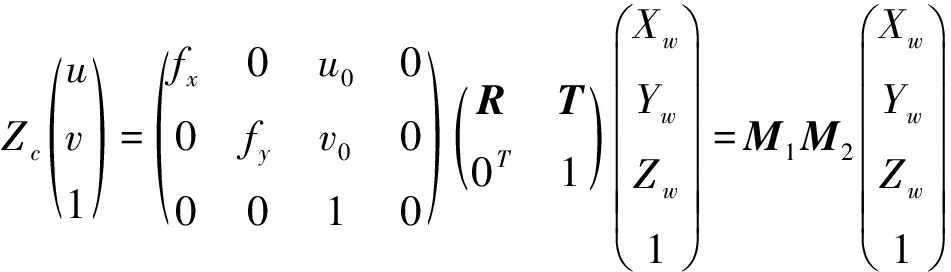
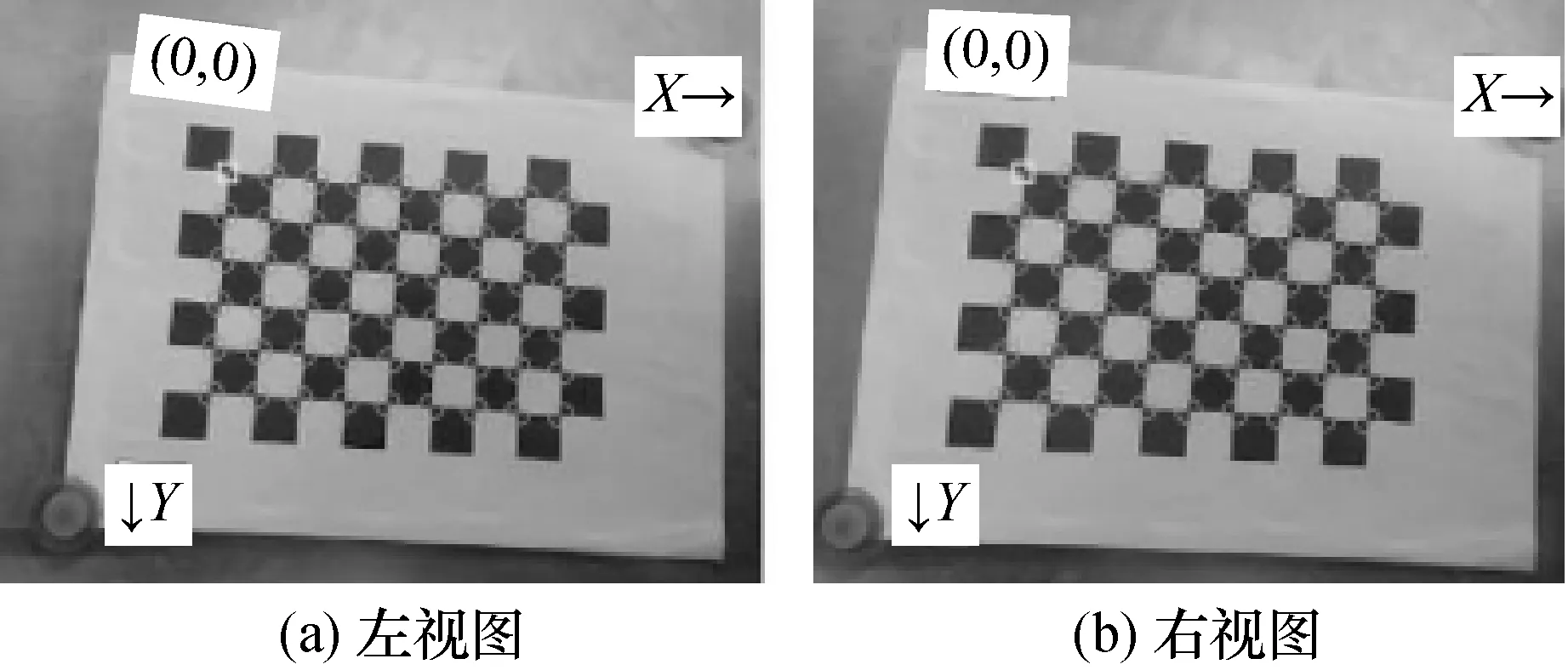
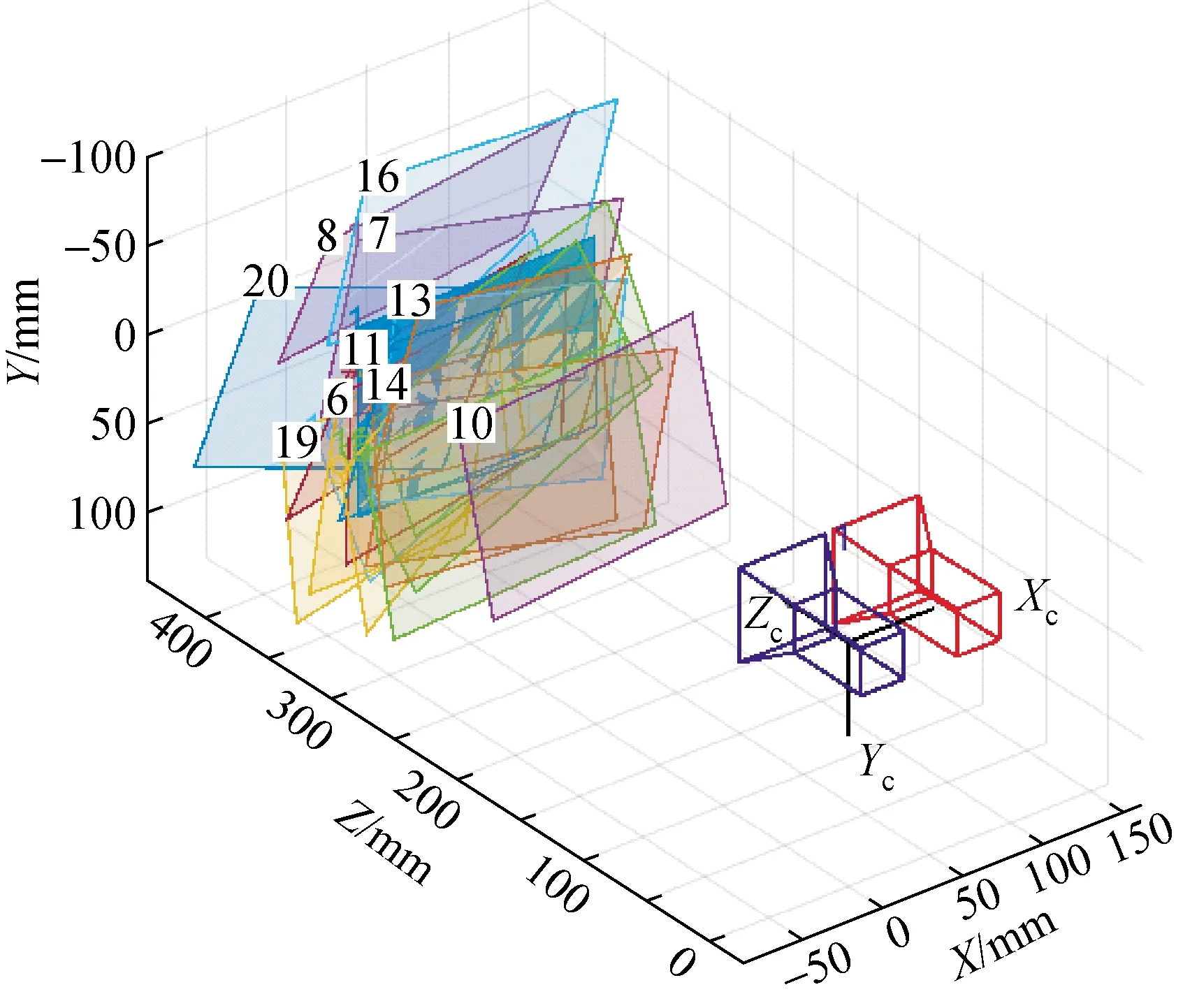
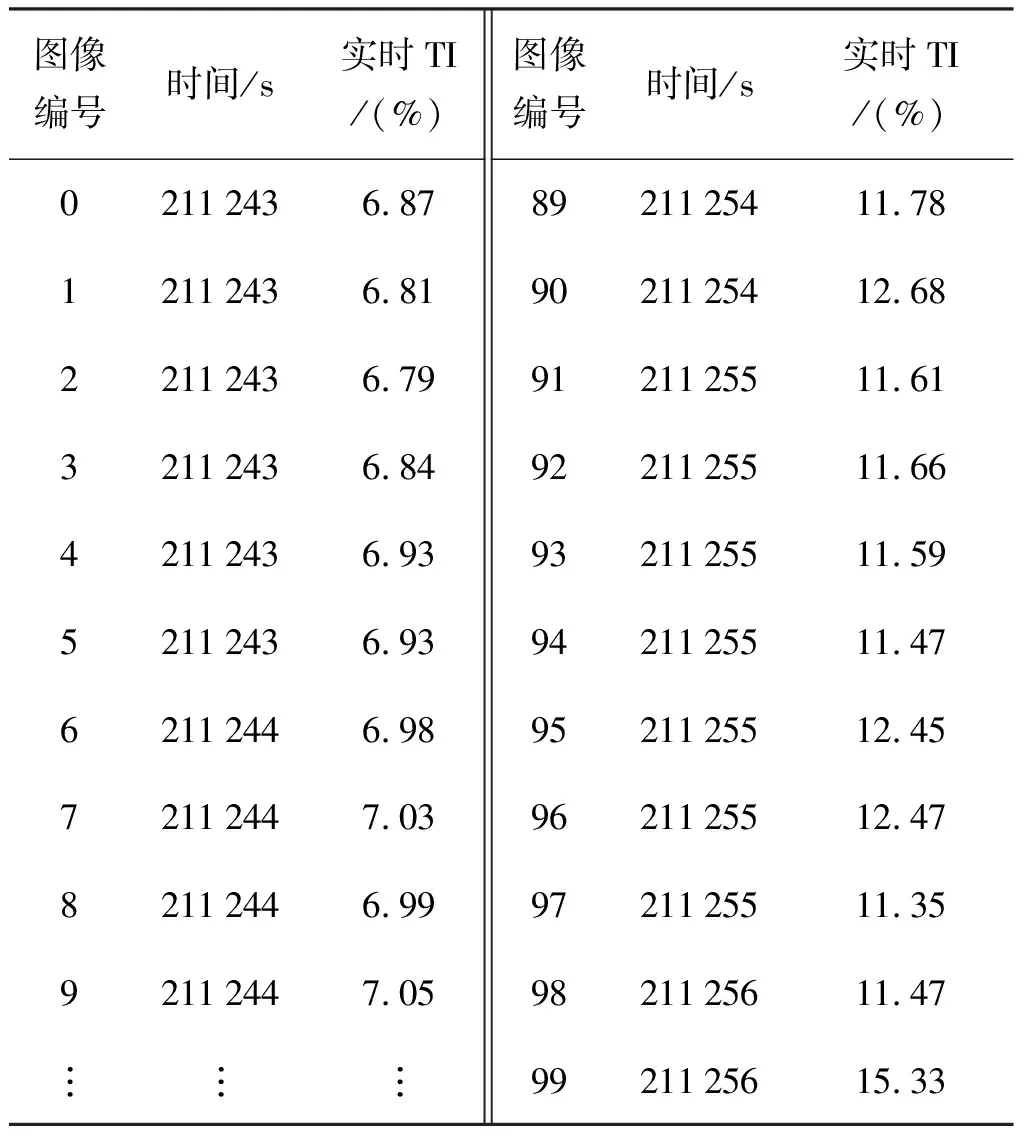
从图3中可看出:在图像灰度值分布的低段(0 图3 图像灰度与曝光量的关系 亮度回归曲线如图4所示,通过数据拟合处理图像灰度值分布的中段(80 图4 亮度回归曲线 通过该公式就可利用标定好的相机进行亮度测试。 要获取图像三维位置信息,则需对摄像机进行位置标定,其标定的过程就是为了求解像素坐标系、图像坐标系、摄像机坐标系及世界坐标系之间的转换关系[22],即通过上述四坐标系之间的转换关系,就可以得到一个世界坐标点与其投影像素点之间的关系[23,24]: (5) 式中:Xw、Yw、Zw为世界坐标系下相机的空间位置;Zc是相机的光轴,其垂直于图像平面坐标系;参数fx、fy、u0、v0分别是焦距的放大系数及主点坐标,一般已标定好的相机上述参数已经确定不变,它们仅与相机的内部结构有关;R为3×3的旋转矩阵;T为3×1的平移矩阵,它们仅与相机相对世界坐标系的位置有关;M1为相机的内参矩阵;M2为相机的外参矩阵。获取相机的内外参数矩阵,即可确定世界坐标系中的图像坐标[25]。 选用双目摄像头拍摄,分辨率为640 pixels×240 pixels。标定板采用格子大小为20 mm×20 mm的黑白棋盘格。左、右相机拍摄20组多角度多方向的图像,通过图像处理得到像素角点坐标,见图5。 图5 左右视图角点检测结果 图6为双目相机内外参数标定过程中,双目相机所处的空间位置。最右边为相机1和相机2的位置关系,能够看出双目标定中两个相机处于同一水平线上,使获取到的左右图像能够处于同一水平面上。相机正前方不同姿态的正方形区域为标定板的位置,从图中能够看出,标定板呈现出20种不同的位置姿态。 图6 左右相机的空间位置 标定得到左镜头、右镜头的内参数: Focal Length: fc=(246.0,245.8); fc_right=(244.9,244.7); Principal Point: vc=(259.2,138.8); vc_right=(243.1,156.6); 双目相机的外参数旋转矩阵R和平移矩阵T为 (6) (7) 将左右相机的内外参数代入式(5)进行运算,计算得到空间坐标值。计算三维坐标与实测三维坐标对比如表1所示。 计算三维坐标值和实测三维坐标值之间的绝对误差,通过计算x、y、z方向上的绝对误差分别为2.182 mm、2.114 mm、1.165 mm,绝对误差均在10 mm允许范围内。 通过上述亮度与位置信息的提取及计算,再根据阈值增量的评价公式即可算出图像场景中的TI值。整个动态眩光测量系统中单帧图像处理时间与每个模块的硬件和软件信息有关,其总时间由图像采集时间、图像传输时间、图像处理计算时间以及图像存储时间4部分组成。依据本文所开发的系统及其设备初步估算系统的动态频率约为8 Hz。 本系统在实验室暗室中搭建,使用计量机构标准动态眩光源校准系统完成系统的准确性检测实验。该校准系统通过固定测量点位置,并调整自身光源亮度变化,能呈现不同的阈值增量值的变化。 为了验证本系统计算的阈值增量值测量的准确性,将动态眩光测量系统放置在规定的测量位置,调节校准器使其出现5种不同的阈值增量值,读取动态眩光测量系统的实测阈值增量值。实测值与标准值数据如表2所示。 从表2可以看出,动态眩光测量系统的阈值增量实测值与标准值的最大相对误差为3.5%,最小值为0.95%,相对误差符合标准动态眩光源校准系统小于5%的要求。 表2 阈值增量实测值与标准值数据表 所搭建的系统能实时输出动态的阈值增量值,将动态眩光测量系统放置于规定的测量位置开始检测,同时读取动态眩光测量系统的实时TI值(在背景亮度为4 cd/m2的条件下)。 表3为时间与阈值增量实时数据。表3中时间读取格式为秒,实时处理图像100张。 表3 时间与阈值增量实时值 为保证频率计算的同步性和准确性,可信时间数据应为完整时间段,因此截取表中编号6~97的数据进行计算。该区间所用时间为12 s,处理92张图像,可计算出系统频率为7.67 Hz。 动态眩光测量系统在眩光测量过程中,图像采集器实时采集现场图像信息,同时对图像进行AD转换和编码处理,然后微型计算机将内存中的数据进行亮度和位置信息提取处理,最后再对数据进行公式运算并实时显示阈值增量值。 在测量过程中产生误差的主要因素有以下2种: (1)获取图像中的眩光源亮度值La、图像中的背景亮度值Lav所引起的不确定度分量u1、u2。 (2)获取眩光源的面积S、动态眩光测量系统与校准器的相对位置R、T、H所引起的不确定度分量u3、u4、u5、u6。 根据上述公式(1)给出的阈值增量的计算方法,建立不确定度评定的数学模型如下: (8) 通过上述实验数据结合数学模型,确定各个不确定度分量如表4所示。 表4 不确定度分量表 合成标准不确定度: 取k=2,则扩展不确定度: Urel=0.5% (1)系统在基于阈值增量的基础上,实现对多变场景阈值增量的动态测量。 (2)基于相机与微型计算机结合测量的特点,提出了一套动态眩光测量系统与方法,通过以图像为分析对象实现实时性的测量阈值增量值,解决了传统检测方法繁琐、机械化等问题,实现了智能化检测。 (3)实验测量以及不确定度分析表明:动态眩光测量频率为7.67 Hz;动态眩光测量的不确定度U=0.5%(k=2),满足实际检测要求。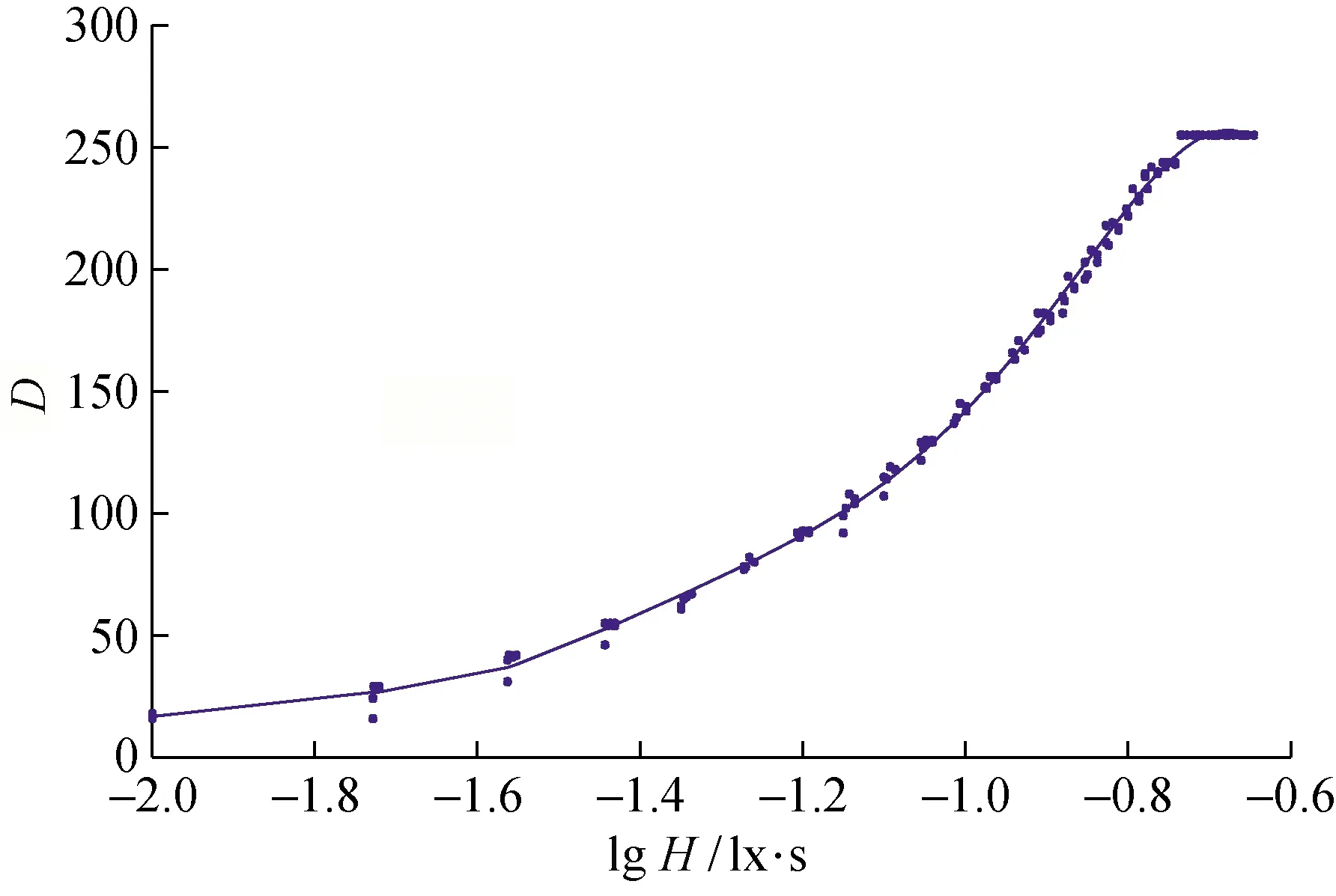

3.2 图像位置信息获取
3.3 动态频率
4 测量验证
4.1 阈值增量TI值准确性检测实验

4.2 动态眩光测量系统频率检测实验
4.3 不确定度评定

5 结 论
