大数据处理环境下大型机组设备故障可视化诊断方法研究
2022-05-26杨华芬
杨华芬
(上海工商外国语职业学院智能制造与信息工程学院,上海 201314)
0 引言
随着互联网技术与信息通信技术不断发展,将大数据融入到设备维护、故障诊断、状态监测及管理中,可以为相关工作人员提供一定的参考[1]。大型机组设备具备大型化、复杂化和自动化等特点,并且其中某些设备一旦出现故障后,可能会影响机组整体的运作,甚至造成安全隐患[2-3]。因此,为保证大型机组设备的安全、高效运行,对其复杂的系统或者主要部件实行故障诊断极为重要。
以往相关人员研究的故障诊断方法都存在一定的弊端,陈东宁等[4]和孙鹤旭等[5]分别研究的多尺度排列故障诊断方法和并行模糊C-均值聚类故障诊断方法,这2种方法存在聚类性能相对较差、对于噪声极为敏感和易引起信息源中断等问题,导致故障诊断性能下降或者无法实现机组故障的可视化。因此,针对上述问题,本文在大数据处理环境下,提出一种大型机组设备故障可视化诊断方法。
1 大型机组设备故障可视化诊断
1.1 振动可视化技术
通过ODS动态处理完成目标对象的振动分析,是振动可视化技术的核心。其可在输入定量无法确定的情况下完成设备的定性或者定量的振动分析[6]。振动可视化技术通过对大型机组设备每个位置部件工作状态实行观察,确定设备待测或者未测试部件的振动信息和振动特征,以此实现机械设备工况和故障的诊断[7]。
为了解决机组设备结构的空间形状调整受到结构1个点或多个点变化影响的问题,需要模拟设备的ODS动态振动情况,且模拟的输入量是有限个点的受迫振动幅度[8]。通过式(1)求解频率响应函数(frequency response function,FRF)矩阵。
(1)
Gs(hυ)为设备振动系统频率响应函数的第s阶频域函数,其表达式为
(2)

为了更好地检测机组设备动态载荷位置,将ODS动态操作的大型机组设备振动系统中的某个点响应作为激振参数[9],则
(3)
Tij、xi和xj分别为ODS的相对值、响应绝对值和响应参考值。
1.2 基于模糊减法聚类算法的机组设备故障诊断
在大型机组设备故障诊断中,以依据振动可视化技术分析获取的大型机组设备的故障频率响应信号为基础;采用频率谱估计方法估计大型机组设备故障频率响应信号的频率谱特征,然后运用模糊减法聚类算法[10]实现机组设备故障诊断。

(4)
i、j为振动信息时序;k为聚类中心;l与η分别为故障数据聚类簇和估计系数。聚类过程中,通过簇间的欧氏距离将剩余簇分配给簇中心,若满足
D(xi,Aj(L))=min{D(xi,Aj(L))}
(5)
则Aj(L)为初始化特征空间的状态矢量聚类中心。
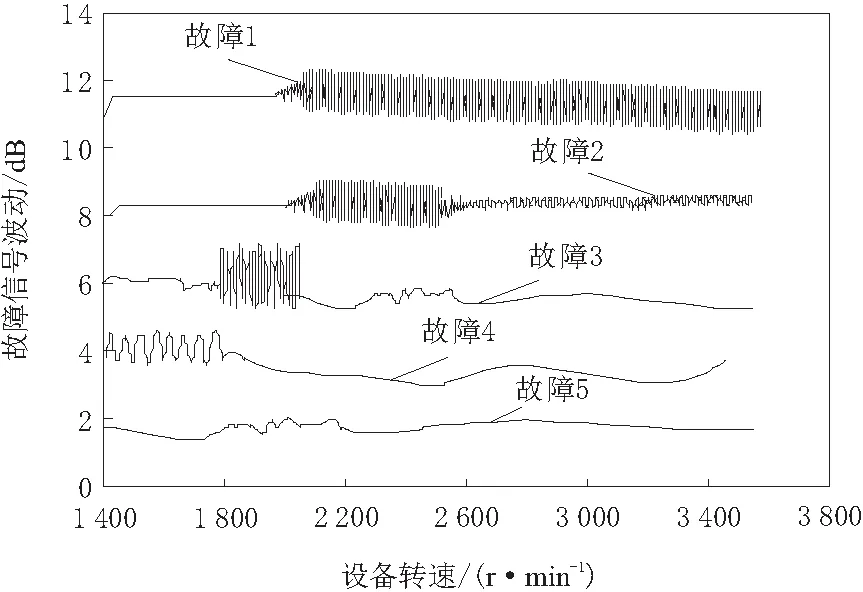
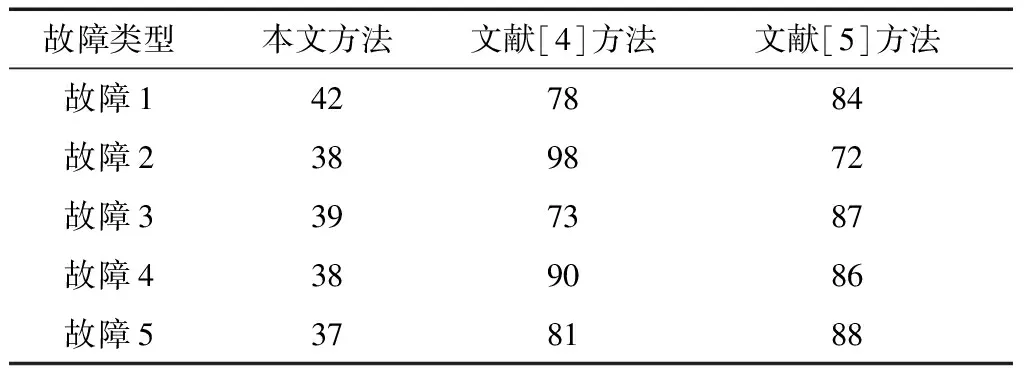
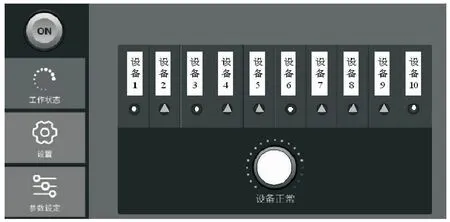
为了获取式(6)描述的模糊矩阵聚类中心矩阵,需要满足如下条件:即刻时序滑动窗口内故障特征的频率谱呈现线性排列,模糊减法聚类算法样本总数量和数量流故障状态监测时间分别用n和(T1,T2)描述,同时设c(1 V={vij|i=1,2,…,c,j=1,2,…,k} (6) 利用欧氏距离获取故障特征邻近点,则有 U={μij|i=1,2,…,c,j=1,2,…,k} (7) 模糊减法聚类算法的聚类目标函数为 (8) 综上所述,当大型机组设备故障频率响应信号的频率谱平均值与上次迭代的平均值相等时,则‖C(l)-C(l-1)‖<ξ;设L=l+1,则大型机组设备的故障频率响应信号的空间矢量簇心的计算式为 (9) 模糊减法聚类算法下大型机组设备故障诊断过程为: a.划分大型机组设备的故障频率响应信号数据集[11],共分为F(xi,Aj(L))个特征子集。 b.重组最优分配方案中的大型机组设备故障频率谱矢量。 c.当模糊减法聚类次数I d.完成大型机组设备的故障特征提取,输出最终故障特征分类,获取故障诊断结果,该诊断结果以SX信息集呈现。 可视化界面可理解为人机交互界面,其作为一种信息交互通道,主要实现人与计算机之间的信息交换;用户可将信息输入至计算机中,并完成相关操作,该输入和操作通过可视化界面完成,然后再通过可视化界面将相关的信息呈现给用户。在大型机组设备故障可视化诊断中,就是将设备运行数据输入至计算机中,然后通过可视化界面展现设备运行状态,为故障诊断提供依据。 根据上述分析得出大型机组设备故障诊断结果信息集为SX,sj为其中的三维信息元素,qj为元素映射后形成的三维空间中的点[12],通过三维平行散点图将sj映射成1组qj,则映射关系为 (10) 故障状态显示需要通过着色增强手段处理平行坐标[13],在颜色区域内用(ri,gi)描述设备运行状态。其中,ri为白色,表示设备处于正常运行状态;gi为灰色,表示设备处于故障状态。设备管理者通过可视化界面获取机组设备信息后,可以及时获取应急处理方案,在短时间内实现对故障的处理。 为了进一步使设备故障状态类别可明显区分以及用户可清晰地了解设备故障的变化规律,利用SX中的各个数据元素sj进行区分,且通过颜色空间实现[14]。 其可视化呈现的具体步骤如下所述。 a.大型机组设备故障状态信息弹性分布式数据集DS的读取,采用弹性分布式数据集类的Collect方法实现。读取分布式数据集DS后生成包括聚类编号B、时间点W和监测量x1,…,xs等在内的设备故障状态信息元素列表为ListS。 b.为了获取聚类编号以及数据点集,需要将ListS内的不同Vector类型的数据元素Di分割成Bi和qi,其中,qi的结构为: qi={qi1,qi2,…,qij,…,qis} (11) qij=(Ti,i,xij)j=1,2,…,s (12) 以此构建相应的聚类编号列表和数据点集列表,分别用ListB和Listq表示。 c.获取着色列表Listcolor,应通过着色处理ListB的各个聚类编号Bi。 d.将Listcolor和Listq作为输入数据,并通过散点方式构建三维平行散点图。 e.采用图标发射器类的指令方法,完成三维平行散点图中的人机交互操作,且呈现单个特征同时间的关联性,可视化图表同时具有开放式特征。 为测试本文方法的性能,采用MATLAB7进行模拟实验,实验选择某类型大型机组设备,设置设备转速为2 400 r/min,采样频率为60 kHz。模拟实验中包括曲轴箱故障、驱动系统故障、发动机故障、气缸故障以及轴承磨损故障,即为故障1、故障2、故障3、故障4和故障5。 将FVMD诊断方法(文献[4]方法)和并行模糊C-均值聚类诊断方法(文献[5]方法)作为本文方法的对比方法,完成相关实验。设置大型机组设备振动故障信号x(t)=cos2πfot,fo=1 kHz,采样时长为T=0.1 s,振动的故障频率采样率为fo=10 kHz。得到设备不同转速下的故障振动信号波形如图1所示。 图1 大型机组设备故障振动信号 实验测试不同方法的故障信息时间属性,结果如表1所示。 表1 3种方法的故障信息的时间属性结果 s 由表1可知:本文方法针对5种故障信息提取的用时最短,其中提取故障1用时最长,仅为42 s;2种对比方法的最短用时分别为73 s和72 s,2种方法的最短用时较大程度高于本文方法的最高用时。说明本文方法的大型机组设备故障信息时间属性较高,可快速完成故障信息提取,其主要原因是本文利用模糊减法聚类算法对机组设备故障进行聚类,缩短了机组设备故障数据采集时间。 通过测试聚类性能,衡量本文方法的故障诊断性能,实验选取的4种设备故障特征是不同的信号频域分量,且这些分量的各样本数据包含振动信号频域中的1x、2x、3x、>3x,同时归一化操作这些数据,最终得到实验样本数据。 采用本文方法对数据进行聚类分析,获取聚类结果,如图2所示。 图2 本文方法的聚类结果 分析图2可知,经过本文方法聚类后,学习样本被聚为3类,聚类中心用M1、M2、M3表示,其分别对应3种故障,说明本文方法具备较好的聚类性能,可有效完成大型机组设备故障聚类,实现设备故障诊断。 大型机组设备故障在可视化呈现时,需对不同的故障数据信息进行调度处理后,完成可视化呈现。以故障2和故障4为例,采用3种方法进行可视化呈现,测试3种方法的可视化频率波数,结果如表2所示。 表2 3种方法的可视化频率波数 分析表2可知:在故障数据为2 500万条时,本文方法的可视化呈现驱动系统故障和气缸故障的最大频率波数均为22.02 cm-1;文献[4]方法呈现驱动系统故障和气缸故障的最大频率波数分别为30.07 cm-1、31.02 cm-1;文献[5]方法呈现驱动系统故障和气缸故障的最大频率波数分别为31.17 cm-1、30.02 cm-1,由此可知,本文方法在执行可视化频率波数最小,且随着数据量的增加可视化频率波数均较大程度优于2种对比方法。由于本文方法在可视化呈现过程中,可完成不同故障可视化任务的调度处理,并且不会对散点集群中的数据进行计算,只计算故障呈现数据,因此,可较大程度降低可视化呈现频率波数。综上分析表明,本文方法具备较好的可视化呈现执行效率,满足大型机组设备故障的可视化需求。 为了进一步验证本文方法的有效性,以故障诊断的可视化展示效果为实验指标,对该方法进行测试。在测试中,设置10个设备,分别编号为1~10,其中,设备1、3、6、和10是正常运行状态,设备2、4、5、7、8和9处于故障状态。采用本文设计的方法对设备诊断结果进行可视化展示,结果如图3所示。 图3中,白色圆形为设备是正常运行状态,灰色三角形为设备处于故障状态。根据图3显示的结果可知,本文方法可以对设备运行状态进行准确展示,与预设条件保持一致,该方法的可视化界面中故障诊断信息较为准确,说明其具有较高的应用价值。 图3 设备故障诊断可视化结果 为有效完成大型机组设备的故障诊断,数据聚类是诊断的前提,因此本文提出大数据处理环境下大型机组设备故障可视化诊断方法。该方法可有效利用故障频率响应信号中的频率谱特征,通过模糊减法聚类算法完成数据分类识别,同时利用三维平行散点图呈现机组设备故障。实验结果表明,该方法在数据信息提取上具有良好性能,完全可以满足大型机组设备故障数据处理的需求。
1.3 基于三维平行散点图与人机交互的数据可视化呈现
2 实例测试
2.1 时间属性测试
2.2 故障诊断性能测试

2.3 故障信号频率波数

3 结束语