基于AFSA-RBF网络校正的多通道高精度测温系统的研究
2022-05-26徐晨,廖平
徐 晨,廖 平
(中南大学 高性能复杂制造国家重点实验室,长沙 410083)
0 引言
工业中常需要对多点温度进行高精度测量,设计研制低成本、宽范围、高精度的多通道测温系统具有着重要意义[1]。
热电偶作为工业中应用最为广泛的热电偶具有着成本低、测温范围广的特点[2],但为了获得更高的测量精度在应用中常需要进行非线性校正。传统的硬件补偿法、查表法和多项式拟合法很难满足宽范围高精度的测量需求[3]。近年来有学者将神经网络引入了温度测量补偿与校正中,如BP神经网络和RBF神经网络,取得了一定效果[3~5]。
本文提出了基于AFSA-RBF网络校正的多通道热电偶温度检测系统。硬件系统主控芯片采用STM32F103ZET6,利用AD7124型ADC模块实现对8路经前置滤波处理的热电偶差分信号进行高精度的AD转化。将AD转换后的热点偶信号和由ADT7320采集的冷端温度信号通过SPI协议传回主控芯片,对数据编帧后通过串口传入上位机,作为经人工鱼群算法(AFSA)优化隐层权值的RBF神经网络的两个输入节点,最终获得的实际的测量温度。实验结果表明,相比与BP和RBF神经网络,AFSARBF网络具有更快的训练速度和更强的泛化能力,系统的测量结果具有较高的精度和较好的可靠性。
1 硬件系统设计
1.1 硬件系统整体结构介绍
系统的硬件总体方案如图1所示,由温度采集模块、冷端补偿模块、通讯模块、中央控制单元等模块组成。系统可以实现对8路热电偶信号的同时采集,信号经前置RFI滤波初步去除共模和差模噪声,然后在ADC模块中进行进一步放大滤波以及AD转换。主控芯片对获得的数字信号进行初步的处理后,将数据编帧,然后以串口通讯的方式将原始数据传给上位机,在上位机中进行校正处理。
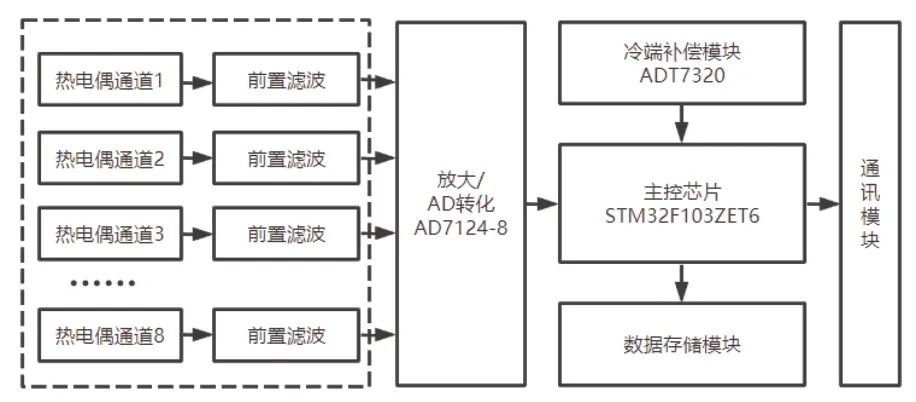
图1 硬件系统整体方案图
1.2 温度采集模块
温度采集模主要由热电偶温度传感器和前置滤波电路构成。
本文选用K型热电偶传感器,测温范围为-200℃~1300℃,采用镍铬和镍铝合金作为热电偶的金属丝线材,Nextel陶瓷纤维作为绝缘层。根据塞贝克效应,两种不同电导体或半导体的温度差异会引起两种物质间的热电势。热电偶正是基于此原理将工作测量节点与参考节点的温度差转化为电势的方法进行测温[6]。
如图2所示,根据塞贝克效应,回路中的热电势为:
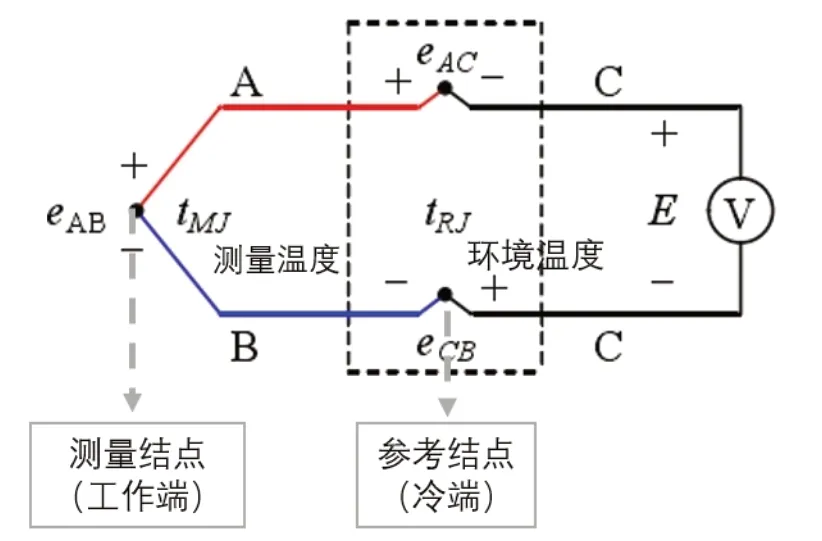
图2 热电偶测温原理示意图

式(1)中,tMJ为工作节点的温度,T0为冷端节点的温度;A、B为两种不同的导体,k为玻尔兹曼常数,e为单位电荷,NA、NB分别为两种导体的自由电子密度[3]。
对热电偶采集到的热电势信号采用一阶低频滤波电路进行前置RFI滤波。采用图3所示的滤波电路可以同时对低频差分噪声和共模噪声进行不同程度的滤波。
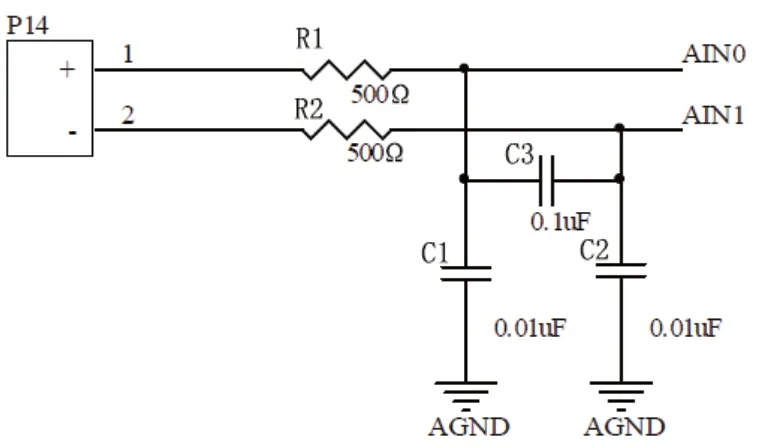
图3 前置滤波电路原理图
如图3所示,由R1、C1和R2、C2实现对共模噪声的滤波,令Ccm=C1=C2,R=R1=R2,共模截止频率可表示为:

对于差模信号,截止频率为:

1.3 信号放大与AD转换模块
对经前置滤波处理的热电势信号,系统采用AD7124-8型ADC模块进一步放大滤波以及AD转换。该模块是一种支持8路差分输入,最高精度为24位的Σ-Δ型ADC模块。芯片结构示意图如图4所示。

图4 AD7124芯片内部结构图
相比于SAR型AD转换器,Σ-Δ型ADC是一种过采样型ADC,它是以微分-积分的方式调整脉冲宽度,以脉冲平均值代替量化,通过极低的周期延时去实现更加精确的确定性采样,对于频率较低但是要求更高分辨率和准确度的温度信号来说,使用Σ-Δ型ADC可实现更高精度的信号采样[3]。同时芯片内置最高128倍PGA,可对微弱的热电势信号进行二级放大处理。
模块接线图如图5所示,AIN0至AIN15分别为经前置滤波处理后8路热电偶的正负端子。由电源模块提供的高精度2.5V电压作为外部基准电压,模块采用SPI通信,分别将spi的四线信号以及片选信号,同步输入信号连接到STM32主控芯片。

图5 AD转换模块电路原理图
模块具有sinc3与sinc4等多种滤波器可选,图6给出了为sinc3与sinc4滤波器在不同输出速率下的均方根噪声,图7、图8给出了两种滤波器的频率响应。
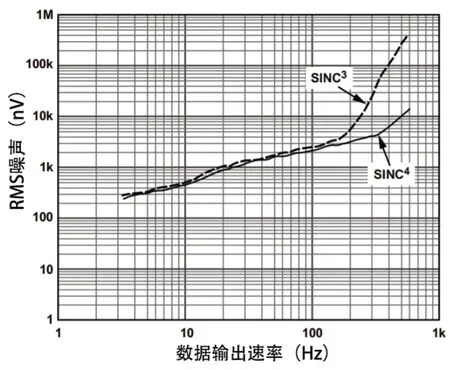
图6 均方根噪声与输出数据速率关系图
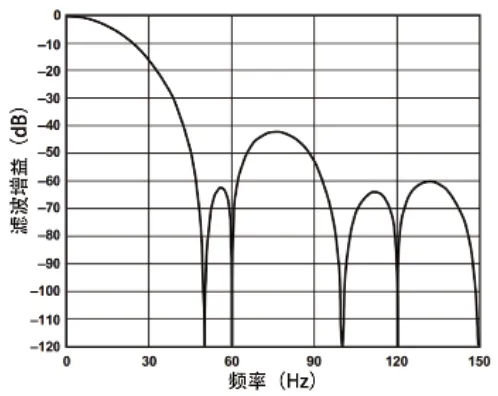
图7 sinc3滤波器响应

图8 sinc4滤波器响应
由图可知,在较高输出速率下sin4的噪声表现明显优于sinc3。且sinc4滤波器具有更优的50Hz/60Hz抑制能力,因此可有效减少因电源纹波对测量造成的影响。因此选择sinc4滤波器以获得更优测量表现[3]。
在sinc4滤波器零延迟模式下,当模拟输入在单个通道上连续采样时输出数据速率为:

其中fCLK为主频频率,FS[10:0]是滤波器寄存器中FX[10:0]位的十进制等效值。
通道的建立时间为:

其中Td e a d为死区时间,F S[1 0:0]=1 时为6 0,FX[10:0]>1时为90。
模拟输入电压AIN经AD转换后的输出码表示为:

其中N在单极性测量状态下取0,双极性状态下取1;Gain为PGA的增益放大倍数,VREF为参考电压。
1.4 冷端补偿模块
由于热电偶是一种差分器件而不是绝对式温度测量器件,还需要采用另一种温度传感器测量冷端温度,本文选用了adt7320集成式温度传感器芯片对热电偶测得的温度进行冷端补偿。
该芯片内置带隙温度基准源、温度传感器和1 6位ADC,用来测量温度并进行数字转换,分辨率为0.0078℃。在PCB设计时,尽可能将该芯片靠近热电偶的参考节点,同时远离发热元件,以尽可能避免与冷端间的温度梯度对测量结果造成影响。模块采用SPI方式进行通信,在片选信号为低时,通信信号有效。接线方式如图9所示。
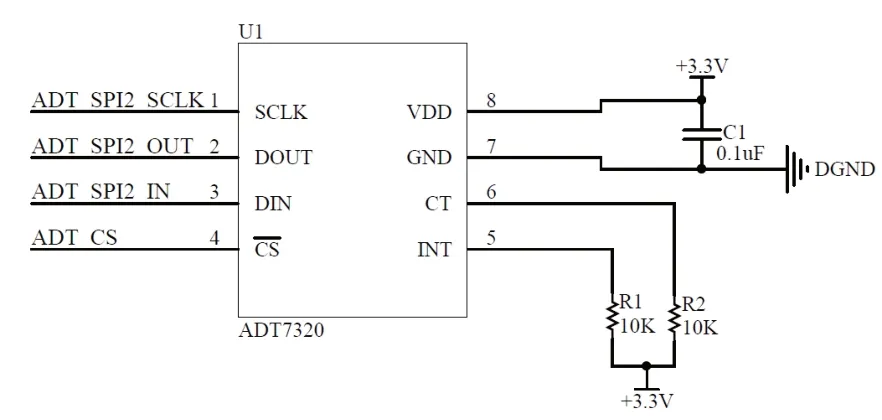
图9 冷端补偿模块电路原理图
2 基于AFSA-RBF网络的误差校正
2.1 RBF网络建立
RBF神经网络全称为径向基函数神经网络,是一种三层的前向反馈神经网络,径向基函数是指函数计算结果仅与新点和隐层节点距离有关的一类实值函数[7]。本文中径向基函数选用Gaussian函数,两点间距离选择欧式距离方法计算。其层次结构如图10所示。
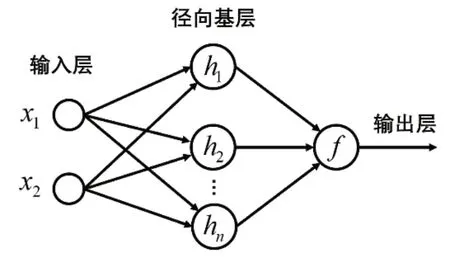
图10 RBF网络结构示意图
输入层的两个节点分别为热电偶采集获得的热电势和冷端补偿模块所采集的温度信号。输出层的输出信号为热电偶工作端的实际温度T。隐层由径向基函数构成,每个隐层节点相关的中心参数为c,宽度为σ隐层至输入层连接权值为w。
Rbf网络隐层的第i个节点的输出为:

式(7)中:X为输入的二维测量数据向量,ci式第一个隐节点的中心,i=1,2,3…M,构造和训练RBF神经网络就是要使它通过学习,确定出每个隐层神经元基函数中心ci和宽度σi,以及隐层到输出层的权值wi。
网络输出层第i个节点的输出为隐节点的输出的线性组合:

式(8)中:wif为qi与yf的连接权值。
本文将RBF学习算法分为两个阶段,首先使用k均值聚类的方法确定中心节点ci和宽度σi。然后应用AFSA算法训练由隐层至输出层之间的权值
2.2 AFSA算法人工鱼寻优策略
人工鱼群算法(AFSA)是一种通过模拟鱼群活动行为的新型寻优算法。本文通过将每组隐层与输出层间的向量作为一只人工鱼,将网络输出的误差作为衡量人空余优劣的标准的FC值,通过反复迭代获得最优的隐层权值组。每只人工鱼在迭代过程中的行为包括觅食、聚群、追尾[8]。
聚群行为:人工鱼当前状态为Xi,设其可见区域内的同伴个数为nf,形成集合K:

若K非空集,则按下式计算中心位置Xc:

如果FCc>FCi且有nf/n<δ,(0<δ<1)则表明周围鱼群中心有较多食物并且不太拥挤,人工鱼向中心位置Xc前进一步。
追尾行为:寻找其可见区域内的状态最优的的邻居Xmax,如果满足FCmax>FCi且有nf/n<δ,(0<δ<1)则表明周围最优鱼Xmax附近有较多食物并且不太拥挤,人工鱼向其位置前进一步。
对比两种行为的适应度,选择较优的最鱼群位置进行调整,若两种行为均不满足条件,则进行觅食行为。
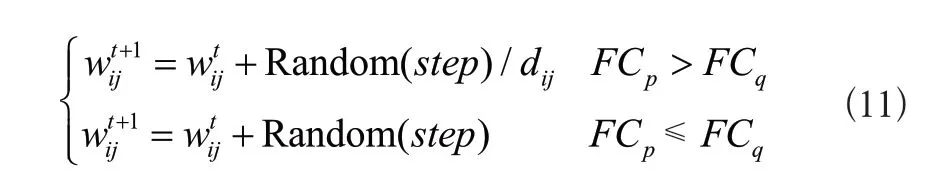
觅食行为:设当前位置为p,在其视野范围内随机选择一个状态q,如果FCp>FCq,则向该方向前进一步;反之,再重新随机选择状态p,判断是否满足前进条件[9]。
2.3 AFSA-RBF校正迭代流程
使用AFSA对RBF网络进行优化训练的流程如图11所示,大致可以分为6个步骤。
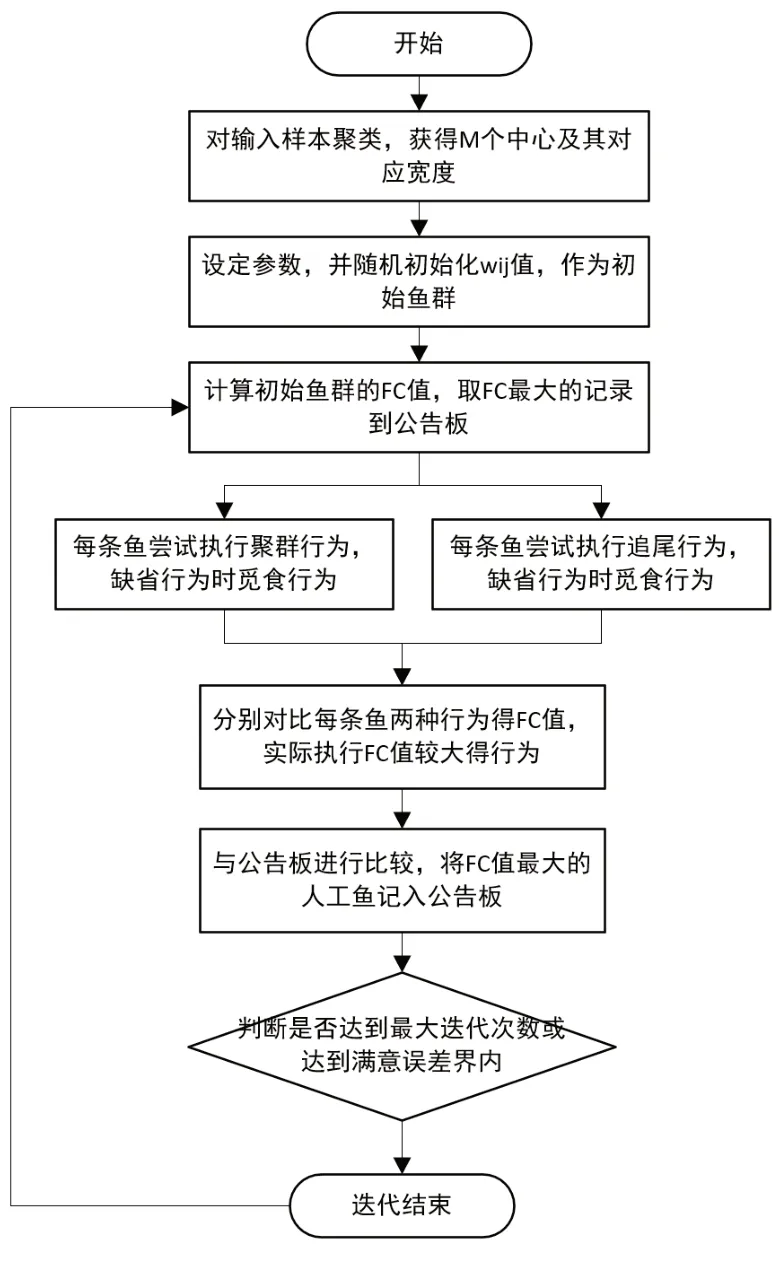
图11 AFSA-RBF训练迭代流程图
1)首先使用K-Means聚类算法对RBF网络输入的所有样本进行聚类分析。设所输入样本集合为S={x1,x2,…,xK},选择初始的M个类别中心c1,c2,…,cM。对于每个样本的xj,将其标记为距离类别中心ci最近的类别,即:

然后将每个类别中心更新为属于该类别的所有样本的平均值。不断重复以上步骤直到类别中心的变化率小于给定阈值,在相应的计算出每个中心所对应的宽度σi。
2)然后设定人工鱼群算法中的各参数,包括鱼群的群体总数N,最大尝试次Trynumber,人工鱼的最大移动步长Step,人工鱼的感知范围Vsual,拥挤因子δ。同时在-1到1的范围内随机生成初始的隐层连接权值wij,将其作为初始鱼群。
3)将当前RBF网络的输出误差E的倒数作为人工鱼群个体的适应度函数,即FC=1/E,选取最优的人工鱼群状态,并将其赋给公告板。
4)采用试探法分别模拟执行聚群、追尾行为,评价适应度函数最优的行为执行,缺省的行为为觅食行为。
5)将人工鱼位置调整后的适应度FCnew与公告板的FCbulletin比较,如果FCnew>FCbulletin,则将新的适应度赋给公告板。
6)判断迭代是否满足终止条件,即连续多次所得值的方差均小于允许方差或已规定的最大迭代数,如果满足则输出FCbulletin,否则回到步骤3)继续执行。
3 网络训练与实验测试
为了使用AFSA-RBF神经网络对数据进行校正,需要有足够数量的输入信号与标准被测温度的数据对网络进行训练。本实验将Fluck公司的标准铂电阻温度计通过专用夹具将待校准的热电偶固定至加热实验箱中,保证两者距离尽可能小,将标准铂电阻所测温度作为网络输出值,本系统所采集的热电势和冷端温度作为输入值,在热端温度在0~1300度之间,每20度设定一个测温点,冷端温度在0~50度之间每5度设定一个测温点,获得系统的训练数据。再采用相同方法以热端温度50度为间隔,冷端5度为间隔获得测试集数据。
设定目标精度为0.0001,最大迭代次数为500代,分别对AFSA-RBF网络、BP神经网络和RBF神经网络进行训练。
图12~图14给出了三种方法的迭代误差曲线,可以看出BP迭代了260代才达到目标指定精度,RBF迭代16次时完成了迭代过程,而本文基于AFSA优化的RBF网络具有着更快的误差下降速度,在16次时就达到了目标精度。
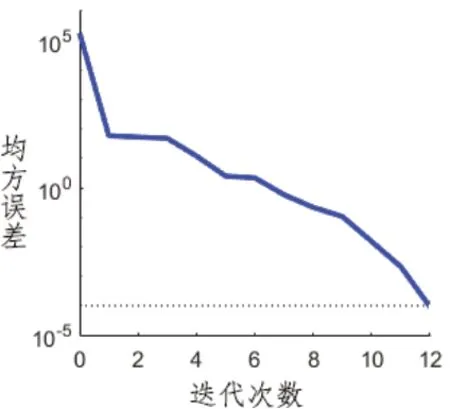
图12 AFSA-RBF网络迭代误差图
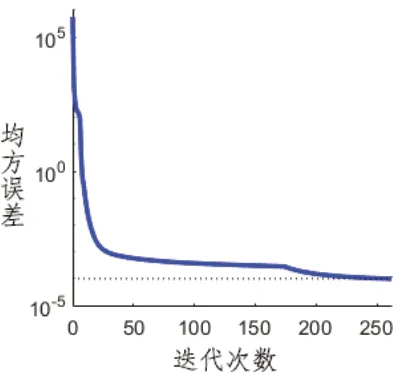
图13 BP网络迭代误差图
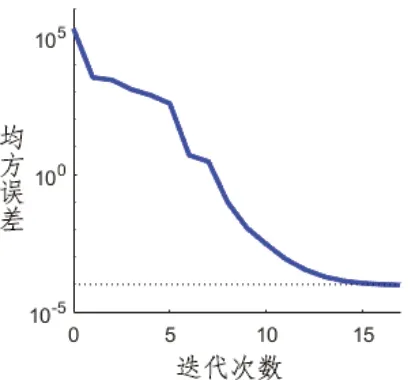
图14 RBF网络迭代误差图
将测试集数据输入训练好的网络,与标准铂电阻测量结果对比,获得测量误差结果如图15~图17所示。
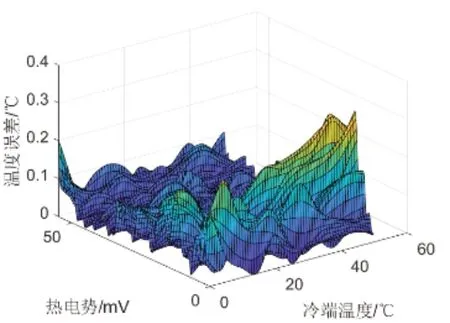
图15 AFSA-RBF网络测试误差结果
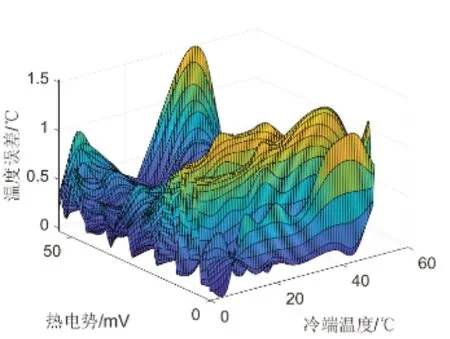
图16 BP网络测试误差结果
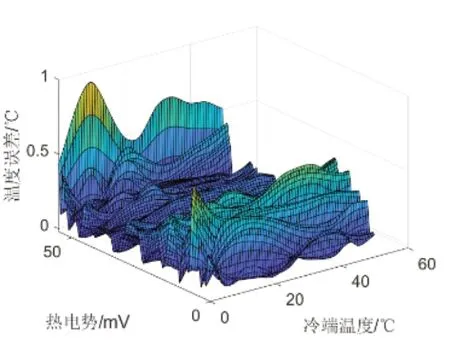
图17 RBF网络测试误差结果
从图中可以看出,三种校正方法在低温区的测量误差均相对较大,是由于K型热电偶在300度以下的低温区非线型较为严重,导致了相对较大的误差。可以考虑在低温区增加样本数据点从而改善在低温区的误差表现。在高温区边界位置AFSA-RBF测量表现表现相对稳定,而其他两种方法则出现了不同程度的误差极大值点,表明AFSA-RBF在边界位置具有更优越的逼近性能。冷端温度与测量误差没有体现出明显关系,表明系统的冷端补偿效果较好,没有引入额外的误差。
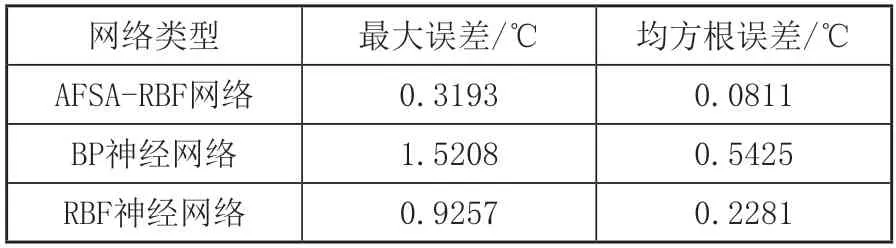
整体来看,AFSA-RBF网络具有较快的收敛速度,误差表现明显优于BP和RBF神经网络,整体测量误差小于0.5度,非线性校正和冷端补偿效果良好,同时表明了系统硬件部分采集数据的准确可靠。
4 结语
本文提出了一种基于STM32为核心、热电偶为温度传感器的多通道温度采集方法,并采用AFSA-RBF网络进行校正。经实验验证,该系统可以有效校正热电偶测量温度存在的非线性误差,使测量的温度误差小于0.5度,相比bp神经网络和rbf神经网络校正有更快的训练速度和更强的泛化能力。该测量方法可以推广至其他类型热电偶及热电阻测温时使用,可广泛应用于对测温精度要求较高的工业测温环境中。
