遗传算法优化PID控制器参数的路径跟踪控制
2022-05-26宋秋红
杨 琛,蒋 鑫*,白 波,宋秋红
(1.上海海洋大学 工程学院,上海 201306;2.上海杰之能信息科技有限公司,上海 200030)
0 引言
无人水面艇(Unmanned Surface Vessel,USV)作为一种能够实现自动感知、运动控制以及目标追踪的智能平台,在军事侦察,水质检测、资源勘探等多个领域得到了广泛的应用。由于无人艇在实际应用过程中存在模型非线性、系统参数时变性以及外界环境的干扰,因此无人艇的运动控制是无人艇在研究中的一大难点,也是诸多学者研究的热点课题,其内容主要包括路径规划,航速航向控制以及路径跟踪等[1]。
目前,对于路径跟踪控制的方法主要有PID控制及其改进[2,3]、自抗扰控制[4]、滑模控制[5,6]以及模型预测控制[7,8]等,这些控制方法已经在无人艇的控制研究中得到深入研究。郑烈心[2]为了增强PID控制器对参数摄动的鲁棒性,提出鲁棒PID控制的方案,并加入滑模控制进一步改善系统的控制性能。王雨迪[4]为增强系统抗干扰能力,引出自抗扰控制,在控制系统中加入了扰动观测器,从而对系统内、外的干扰进行补偿。柳晨光[7]采用模型预测控制的方法来研究无人艇路径跟踪控制问题,提出了线性模型预测与非线性模型预测两种控制方案并进行对比试验,通过仿真表明非线性模型预测控制方案有着更高的控制精确度。但由于船舶运动时的非线性、大时滞以及干扰随机性等动态特性,常规的控制方法在工程上的控制效果并不理想。而智能算法不依赖于精准的对象模型且能提高系统的自适应能力,无人艇的运动控制中常引入智能控制以满足路径跟踪控制的要求。
基于此,本文提出一种基于遗传算法优化PID控制器的路径跟踪控制方案。在制导环节中,针对外界环境干扰引入积分操作,设计出一种改进的ILOS(Integral Line of sight,ILOS)制导律;在PID控制环节中,采用遗传算法(Genetic Algorithm,GA)对控制器参数进行优化。通过仿真表明,遗传算法优化PID控制器参数的路径跟踪控制方案能够改善系统的控制性能。
1 数学模型
1.1 USV运动数学模型
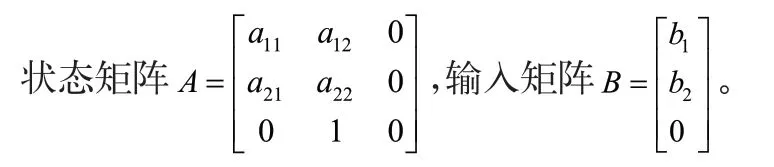
研究USV的平面运动时,通常只需要考虑三自由度运动学关系[9],此时可建立USV移动速度及其时间导数、转角速度及其时间导数以及舵角的状态空间型运动数学模型

式(1)中X=[vrΨ]T是状态变量,其中Ψ是USV艏向角,U=δ是控制输入。
上式可转化为二阶响应模型,即野本(Nomoto)模型[9]:
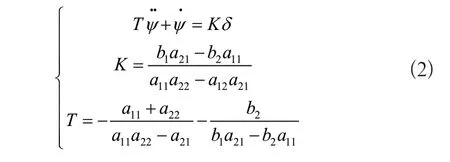
K、T均为USV的操纵性指数,决定了艏向变化对操纵控制的响应特性。K是从δ(s)到r(s)的静态增益,称为回转性指数,K越大,回转性能越好。时间常数T是跟从性指数,T越小,响应越快,跟从性能越好。
1.2 外界随机干扰模型
研究USV运动模型在被控过程中的动态特性,还需要考虑风、浪、流造成的环境干扰。由于这些干扰具有不确定性,很难精准地建立数学模型,本文定义干扰为w=[ω1ω2ω3]T近似描述环境干扰,并且满足:
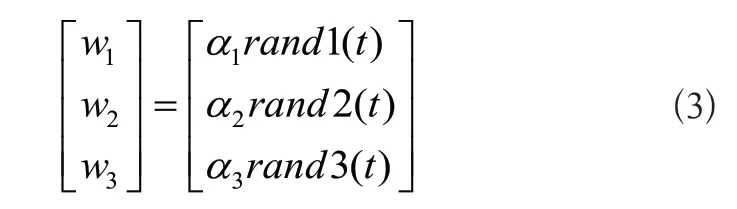
其中,α1、α2和α1分别为风、浪、流对平面三自由度干扰的权重参数(α1≥0,α2≥0,α3≥0),rand1(t),rand2(t)和rand3(t)均表示[-1,1]的均匀随机数。于是,获得在干扰环境下的USV运动数学模型,使得USV运动数学模型从确定性系统变为随机系统。

2 路径跟踪控制器设计
整体控制方案设计如图1所示。在制导环节中,无人艇首先获得期望路径的坐标点信息以及无人艇的当前位姿信息,通过ILOS制导律输出无人船的理想艏向角。在PID控制环节中,将理想艏向角作为控制器的输入信号,同时,利用遗传算法结合当前横向误差与航向误差,优化PID控制器的相关参数。最后,输出无人艇推进器的偏转角作为无人船的运动指令,控制无人船进行路径跟踪。
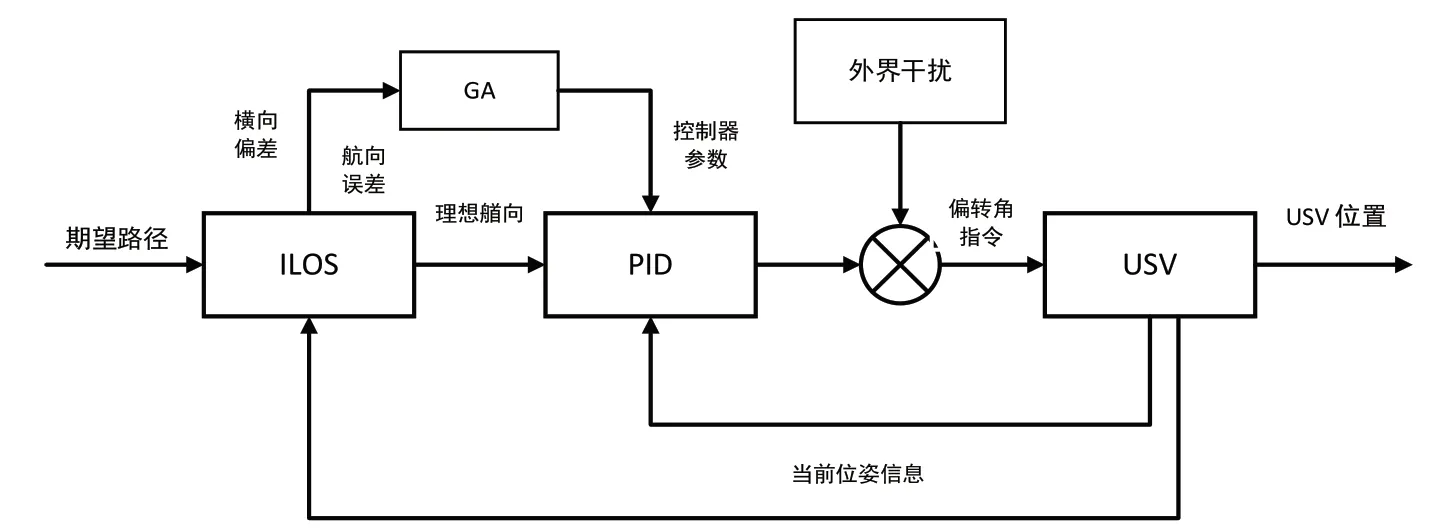
图1 路径跟踪控制器结构
2.1 改进的ILOS制导算法
LOS是一种经典有效的制导算法,广泛应用于工程船舶。LOS制导算法不依赖于USV运动数学模型,但需要期望路径和USV的实时位姿信息,来产生当前USV运动控制所需的艏向角。
运用LOS制导律应当考虑环境负荷引起的USV航向漂角,通常做法是:
1)运用积分视距制导算法[10,11];
2)变前视距离策略[12,13]。本文为了对航向漂角进行补偿,首先在传统的LOS制导算法引入积分操作,得到ILOS制导律,即:
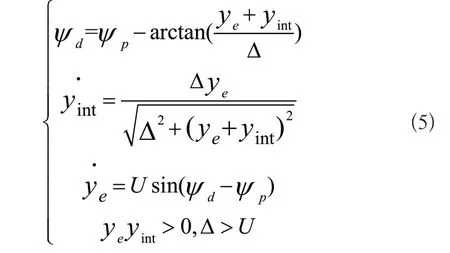
式(5)中,ye是横向偏差,Δ是前视距离。Ψd理想艏向角,Ψp是期望路径的方位角。为了进一步改善积分效果,采用变前视距离的策略,使得前视距离与横向偏差呈非线性的变化关系,以此避免较大的超调量。

式(6)中,当ye较大时,以较小的Δ使得期望艏向变化更陡,显著改善了USV收敛速度,而在ye较小时,R较大,使得期望艏向变化平缓,有助于抑制USV频繁打舵,增强控制性能。
构建如下的Lyapunov函数:

代入式子,并求导:

2.2 PID艏向控制方法设计
根据PID控制器的三个参数对系统的作用特点,以及控制目标无人艇的艏向实际的控制需要,首先设计PD型艏向控制方法:

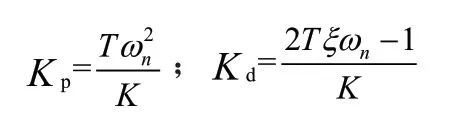
式(10)中,Ψe是航向误差,Kp和Kd为PID控制器的控制参数,将式(10)代入式(11),可得:

式(11)根据闭环控制系统设计方法可进一步改写为:

式(12)中,ξ系统的阻尼比,通常取值为0.8≤ξ≤1.0,ωn是无人艇的自然振荡频率。
根据上述的设计方法可以得出:
当无人艇受到外界环境风浪流等干扰时,加入可消除偏差的积分项,以使得系统获得更好的抗干扰性能。于是,设计PID型艏向控制方法为:

Ki的取值根据文献[14]介绍的方法满足:
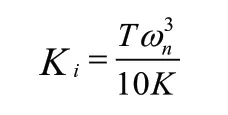
将式(13)代入式(14),则有:

为了满足系统的稳定性要求,Kp、Ki和Kd的取值需要使得该闭环控制系统特征方程的根具有负实部。
2.3 遗传算法优化控制器参数
采用PID进行艏向控制时,参数的选取影响着系统的控制性能,传统的经验试凑法不能够满足处于无人艇控制需求。本文利用遗传算法对控制参数进行全局优化,以使得无人船在实际运动过程中获得更好的动态特性。
1)参数编码与种群初始化
控制器需要调整的参数有Kp、Ki以及Kd,通过遗传算法对这三个控制参数进行编码,为了提高算法的运行效率,根据无人船的初始状态产生一组给定的控制器参数值,初始种群是基于该组给定的参数值并结合下式进而产生50个个体,进化100代。在接下来每次优化中,保留最优的个体用作产生下一次优化的初始种群。
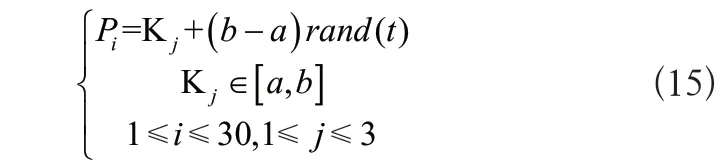
Pi是初始种群的个体,Kj是给定的一组参数值,rand(t)用于产生[-0.1,0.1]的随机数。
2)目标函数与适应度函数
目标函数是评价一个系统控制效果的性能指标,而适应度函数是一个种群个体优劣的衡量标准。横向偏差ye与航向误差Ψe均是无人船控制效果的实际表现,为使得系统参数进行有效合理的优化,选取横向偏差和航向误差作为目标函数的影响因素,故建立下式作为目标函数。

式(16)中T′是采样周期,目标函数值越小说明系统控制性能越好,根据最大化原则选取目标函数的倒数为对应的适应度函数,即:

3)选择、交叉与变异
根据各个个体的适应度值,采用轮盘赌的方法选择优良的个体,并使用算术交叉和均匀变异得到下一代个体,产生下一代种群,其中将每一代最优良的个体直接保留到下一代。将交叉概率设置为0.8,变异概率设置为0.1。
4)重复3)与4)步骤,直至达到收敛或者参数优化的预期效果。
3 仿真分析
为了分析本文所提出的无人艇路径跟踪控制方案的控制效果,选择基于传统PID控制与LOS制导的无人艇路径跟踪的控制方案进行对比,并利用MATLAB进行仿真试验。其中无人艇模型、ILOS制导律以及控制器中所需参数详如表1所示。操纵性指数K和T计算方法如文献[9]所示,对比方案的PID控制器参数采用表1中的Kp、Ki和Kd,本文方案中则以该组参数产生初始种群。
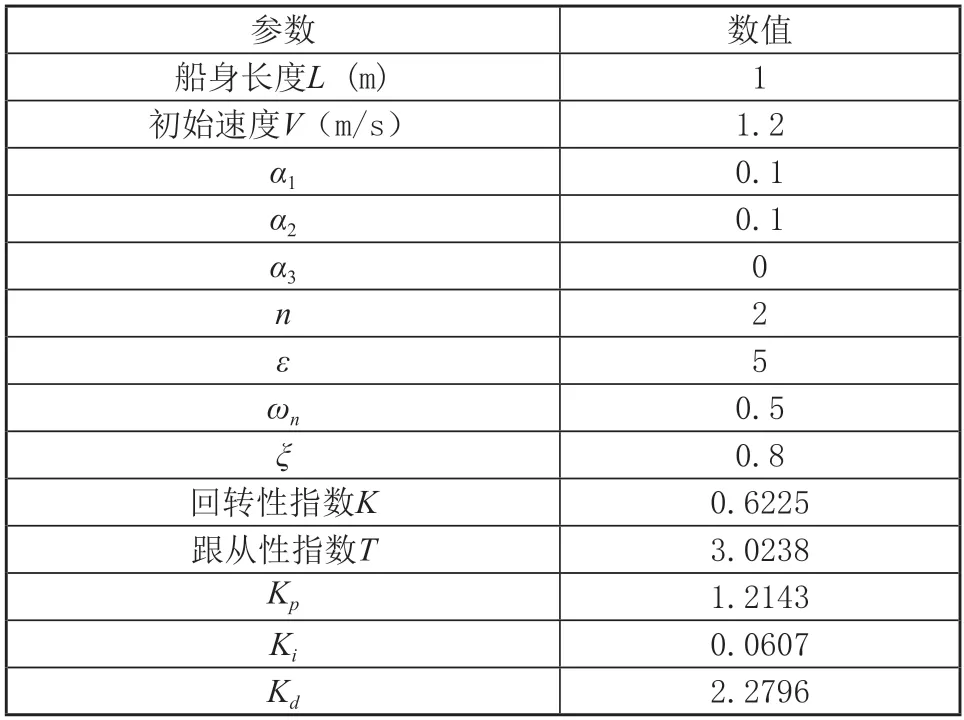
表1 系统相关参数设定值
仿真结果图2和图3显示的是对直线路径跟踪的航迹和航向误差收敛的曲线。对比方案在缺少ILOS与遗传算法优化参数的情况下,航迹波动较大且航向误差有明显超调量。相较于对比方案,本文提出的方案能够使得无人艇在更短时间内逼近期望路径并达到平衡状态,且航向保持更加稳定,具备更好的动态性能与快速性能,表明本方案的先进性。
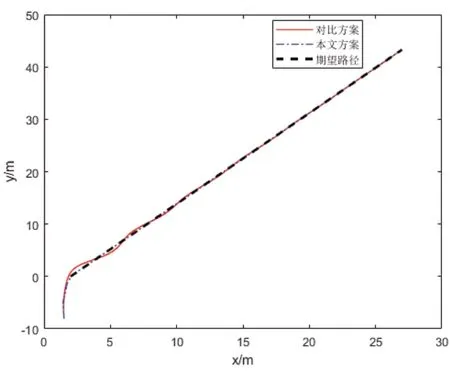
图2 直线路径跟踪控制效果
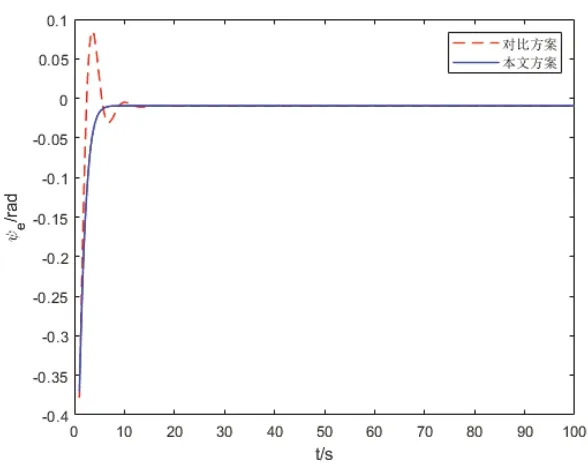
图3 航向误差收敛曲线
仿真结果图4和图5是对圆周路径进行跟踪控制的效果,对于圆周路径的跟踪可以展示无人艇的跟从性能和回转性能。本文提出的方案能够自适应调整无人艇的运动状态,表明该路径跟踪控制器能够应对路径变化,具备对复杂路径进行准确跟踪的能力。
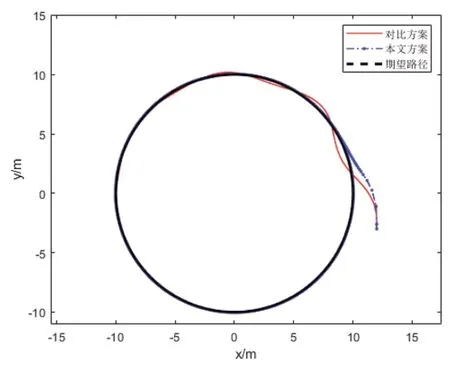
图4 圆周路径跟踪控制效果
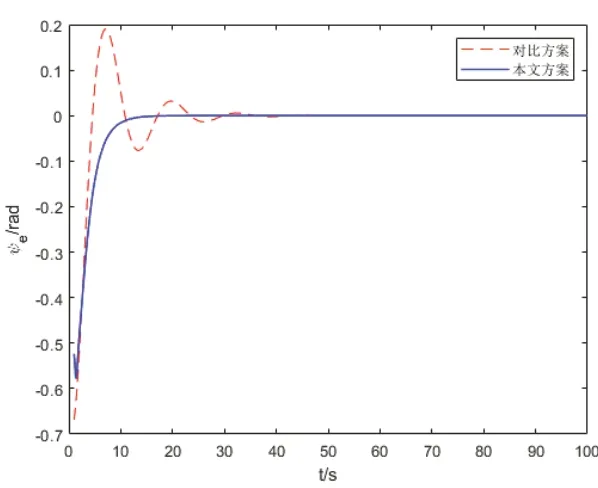
图5 航向误差收敛曲线
4 结语
针对无人艇的路径跟踪过程中运动控制问题,本文设计一种基于遗传算法优化PID控制器参数的路径跟踪控制方案。通过改进的ILOS制导律来抵消环境负荷对无人艇运动的干扰,增强系统的抗干扰能力,同时采用遗传算法对PID控制器的参数进行全局优化,以使得无人艇在控制过程中获得良好的动态性能。最后,通过仿真结果表明本文的路径跟踪控制方案较于传统方案,具备优越性与先进性。下一步将着重研究外界环境风浪流的干扰,使得干扰模型更为精确,从而使得控制策略能够被充分执行。
