机器人辅助腹腔镜与传统腹腔镜肾盂成形术治疗小儿肾盂输尿管连接处梗阻的Meta分析
2022-05-26杨平李康明邹兵邓睿彭秋
杨平 李康明 邹兵 邓睿 彭秋
遂宁市中心医院小儿外科,遂宁 629000
肾盂输尿管连接处梗阻(ureteropelvic junction obstruction,UPJO)是引起小儿肾积水最常见的病因,也是儿童常见的泌尿系统先天畸形,发病率为1/800~1/600[1]。大多数患儿因围产期常规超声检查发现肾盂积水而确诊,少数患儿因儿童期出现腹部不适、腹痛或呕吐被发现[2]。既往开放式Anderson-Hynes肾盂成形术是UPJO的首选治疗术式,成功率在90%以上[2]。近年来,随着微创手术技术的发展,传统腹腔镜肾盂成形术(laparoscopic pyeloplasty,LP)及机器人辅助腹腔镜肾盂成形术(robotic-assisted laparoscopic pyeloplasty,RALP)在UPJO的治疗中发挥了重要作用,与开放肾盂成形术相比,腹腔镜手术创伤小、恢复快,且手术成功率不低于传统开放手术[1]。但对于腹腔空间有限的儿童而言,腔镜下缝合打结较为困难,对术者技术要求较高,且学习曲线较长。而达芬奇机器人辅助腹腔镜手术具有灵活、稳定、高效等优点,大大降低了腔内解剖分离与缝合打结等精细操作的难度[3]。本研究将采用Meta分析对RALP及LP治疗UPJO的效果进行综合评价。
材料与方法
一、文献纳入与排除标准
1.纳入标准:①研究对象为新生儿和儿童;②研究内容为机器人辅助腹腔镜手术或传统腹腔镜手术治疗小儿肾盂输尿管连接处梗阻的疗效对比;③手术成功标准为术后及随访期间临床症状消失或减轻、泌尿系超声检查提示肾积水改善以及肾图上引流曲线改善[4]。
2.排除标准:①研究对象为成人;②单纯纳入RALP或LP治疗UPJO的研究;③重复文献或文献数据不全;④来自于同一中心的多个研究,存在数据重复;⑤个案报道、动物实验、综述或系统综述、会议记录及质量评价过低的文献;⑥缺少手术成功率、手术时间、术中或术后并发症、术中失血量、术后住院时间、术后镇痛药的使用、住院费用等其中任何一项研究指标的研究。
二、检索策略
由两名检索员独立检索。应用计算机系统检索英文数据库(PubMed,Cochrane database,Web of Science,Ovid&Embase)和中文数据库(中国知网、维普数据库、CBM、万方数据库)。英文检索词:Robotic/Robot-assisted,Pyeloplasty,Children/Pediatric&Ureteropelvic junction obstruction;中文检索词:机器人、肾盂成形术、儿童、肾盂输尿管连接处梗阻。文献公开发表时间截至2020年10月。
三、数据提取、结局指标及质量评价
由两名评价者阅读文献题目和摘要,按照纳入标准及排除标准筛选文献,然后查找并阅读全文,独立提取数据,并进行交叉核对。提取内容包括:①研究的基本信息:第一作者、发表年份、研究地区、文章出处、样本量以及患儿年龄、性别、病变侧别、随访时间;②研究的结局指标:手术成功率、术中及术后并发症发生率、手术时间、术后镇痛药的使用情况、住院时间、住院费用、术后随访时间、远期再狭窄发生率。文献质量评价参考Newcastle-Ottawa(NOS)评价量表,包括选择(4分)、可比性(2分)和结局(3分);分为低风险(7~9分)、中等风险(4~6分)及高风险(1~3分);对NOS评分<5分的文献予以剔除。
四、统计学处理
使用RevMan 5.3对数据进行分析。对各研究进行异质性检验,若P≥0.1、I2<50%,可认为各项研究同质,选用固定效应模型;若P<0.1、I2≥50%,可认为各项研究异质,选用随机效应模型。二分类变量采用OR作为分析统计量;连续型变量采用加权均数差(mean difference,MD)作为分析统计量。对于纳入文献较少、数据不够全面的研究指标则采取描述性分析。
结 果
一、文献检索结果
根据检索策略获得308篇文献,剔除文献共296篇,其中重复文献114篇,个案报道、动物实验、综述或系统综述、会议记录及无关文献等共128篇,与本文内容不符、数据不全及质量评价较低的文献54篇,最终纳入12项研究[2-13]。文献检索结果及流程见图1。

图1 文献检索结果及流程Fig.1 Literature retrievals and flows
二、纳入研究文献中病例基本特征
纳入的12篇文献中,11篇为回顾性队列研究,1篇为随机对照研究,总病例数1 531例,其中机器人辅助腹腔镜手术809例,传统腹腔镜手术722例[10]。纳入Meta分析的文献病例基本特征见表1,纳入研究的文献病例手术部分相关指标见表2[2-13]。

表1 纳入Meta分析文献的病例基本特征Table 1 Basic characteristics of eligible studies

表2 纳入研究文献中的UPJO病例手术相关指标Table 2 Operative related parameters
三、Meta分析结果
(一)手术成功率
共有10篇文献记录了两种手术方式的成功率,异质性检验结果χ2=3.72、I2=0%、P=0.950,采用固定效应模型。RALP组手术成功率高于LP组,差异有统计学意义[OR=2.66,95%CI(1.09,6.49),P=0.030][2-4,6-7,9-13]。 见图2。
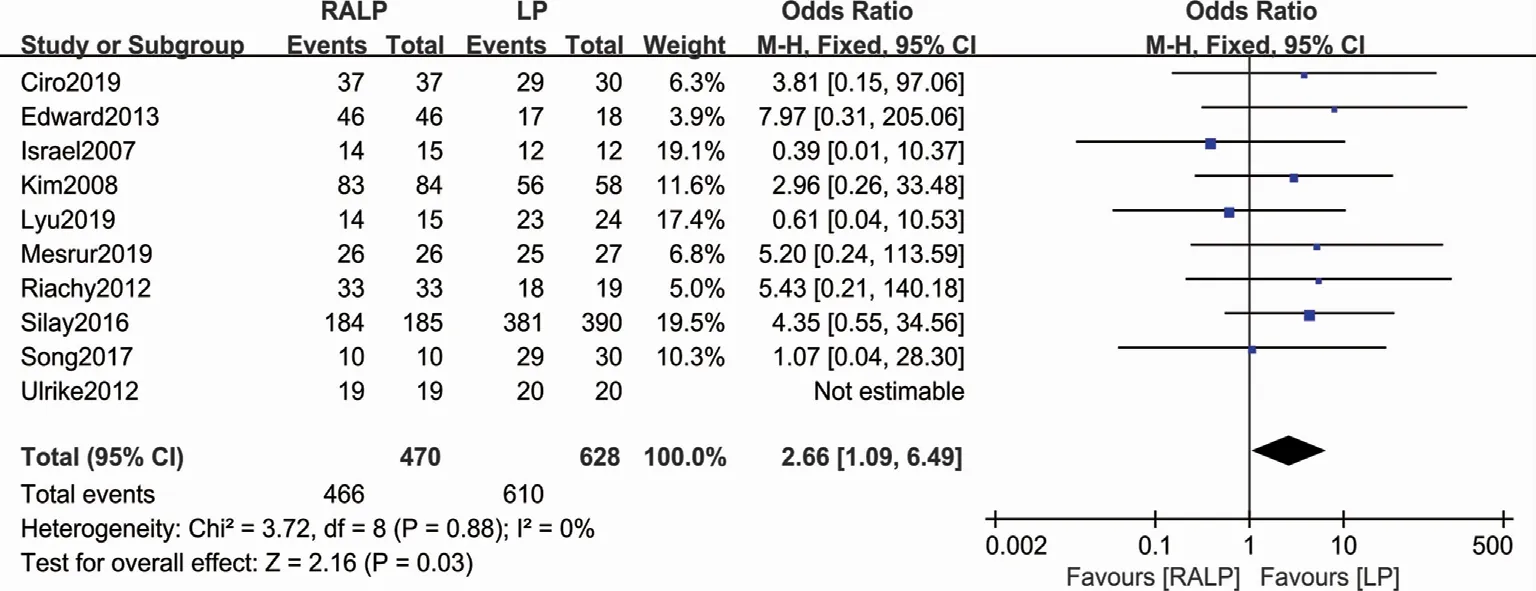
图2 肾盂输尿管连接处梗阻RALP和LP手术成功率的Meta分析 RALP:机器人辅助腹腔镜肾盂成形术;LP:传统腹腔镜肾盂成形术Fig.2 Meta-analysis of operative success rate of RALP versus LP
(二)手术时间
有7篇文献比较了两种手术方式的手术时间,异质性检验结果χ2=48.87、I2=88%、P<0.001,采用随机效应模型。RALP组手术时间短于LP组,差异有统计学意义[MD=-6.68,95%CI(-13.10,-0.26),P=0.040][3,6-7,10-13]。见图3。
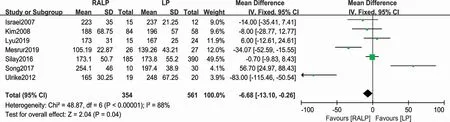
图3 肾盂输尿管连接处梗阻RALP和LP手术时间的Meta分析 RALP:机器人辅助腹腔镜肾盂成形术;LP:传统腹腔镜肾盂成形术Fig.3 Meta-analysis of operative success rate of RALP versus LP
(三)术中并发症发生率
有4篇文献比较了两种手术方式的术中并发症发生率,其中最常见的术中并发症为双J管置入困难,其他包括出血、异位血管损伤、腹腔内其他脏器损伤等。异质性检验结果χ2=2.100、I2=0%、P=0.550,采用固定效应模型。RALP组与LP组的术中并发症发生率差异无统计学意义[OR=0.53,95%CI(0.25,1.12),P=0.09][4,10-12]。见图4。

图4 肾盂输尿管连接处梗阻RALP和LP术中并发症的Meta分析 RALP:机器人辅助腹腔镜肾盂成形术;LP:传统腹腔镜肾盂成形术Fig.4 Meta-analysis of intraoperative complications of RALP versus LP
(四)术中失血量
有2篇文献比较了两种手术方式的术中失血量,采用描述性分析[3,11]。Silay等[11]报道RALP组与LP组的术中失血量差异无统计学意义[(26.4±23.8)mL比(25.6±26.3)mL,P=0.750];吕逸清[3]报道两组术中失血量相同(均为15 mL)。
(五)术后住院时间
有6篇文献比较了两种手术方式的术后住院时间,异质性检验结果χ2=110.04,I2=95%,P<0.00001,采用随机效应模型。RALP组术后住院时间短于LP组,差异有统计学意义[MD=-0.91,95%CI(-1.01,-0.81),P<0.00001][7-8,10-13]。见图5。

图5 肾盂输尿管连接处梗阻RALP和LP术后住院时间的Meta分析 RALP:机器人辅助腹腔镜肾盂成形术;LP:传统腹腔镜肾盂成形术Fig.5 Meta-analysis of post-operative length of stay of RALPversus LP
(六)术后并发症发生率及再手术率
有10篇文献比较了两种手术方式的术后并发症发生率,其中最常见的术后并发症为尿漏、双J管移位、血凝块堵塞双J管、肾积水加重需再次手术等。异质性检验结果χ2=5.620、I2=0%、P=0.780,采用固定效应模型。RALP组术后并发症发生率低于LP组[OR=0.44,95%CI(0.26,0.76),P=0.03][2-4,6-7,9-13]。 见图6。

图6 肾盂输尿管连接处梗阻RALP和LP术后并发症的Meta分析 RALP:机器人辅助腹腔镜肾盂成形术;LP:传统腹腔镜肾盂成形术Fig.6 Meta-analysis of postoperative complications of RALP versus LP
有6篇文献比较了术后再手术率,主要原因包括术后肾积水加重、术后再狭窄及双J管移位等。异质性检验结果χ2=2.040、I2=0%、P=0.030,采用随机效应模型。RALP组再手术率低于LP组[OR=0.44,95%CI(0.26,0.76),P=0.03][2-4,6,10,13]。见图7。

图7 肾盂输尿管连接处梗阻RALP和LP再手术发生率的Meta分析 RALP:机器人辅助腹腔镜肾盂成形术;LP:传统腹腔镜肾盂成形术Fig.7 Meta-analysis of re-do operative rate of RALP versus LP
(七)术后镇痛药的使用
有3篇文献比较了术后镇痛药的使用,采用描述性分析[2,10,12]。Esposito等[2]报道RALP组与LP组术后镇痛药的使用时长差异无统计学意义(28 h比26.5 h,P=0.51);Silay等[10]比较了RALP组与LP组术后镇痛药使用量,结果显示两组间差异无统计学意义[(1 111.11±529.03)mg比(1 200.00±532.92)mg,P=0.278];Song等[12]报道RALP组镇痛药使用时间短于LP组,差异有统计学意义[(2.4±1.3)h比(1.1±1.2)h,P<0.001]。
(八)住院费用
有4篇文献比较了两组间住院费用的差异,采用描述性分析方法[3,5,8,10]。吕逸清等[3]报道显示RALP组的住院费用较LP组高(62 758.89元比23 839.46元);Mesrur等[10]研究表明两组住院费用差异有统计学意义,RALP组的费用明显较高[(8 868.57±1 054.95)TL比(2 347.60±870.50)TL,P=0.001];Casella等[5]报道RALP组与LP组平均住院费用差异无统计学意义($15,337比$16,067,P<0.46),但亚组分析表明,RALP组中予顺行性支架管置入者手术时间较其他支架置入方式的RALP组及LP组患儿均要短,因而麻醉及手术室成本减少,大大降低了手术相关费用,特别是与LP组相比费用更低,差异有统计学意义($11,949比$16,067,P<0.0001);Liu等[8]报道RALP组与LP组住院费用差异无统计学意义[$(13,330±1019)比$(11,806±1462),P=0.18]。
(九)术后随访时间
有4篇文献比较了术后随访时间。异质性检验结果χ2=297.90、I2=99%、P<0.00001,采用随机效应模型。RALP组术后随访时间短于LP组[MD=-3.14,95%CI(-4.37,-1.91),P<0.00001][6,10-12]。见图8。
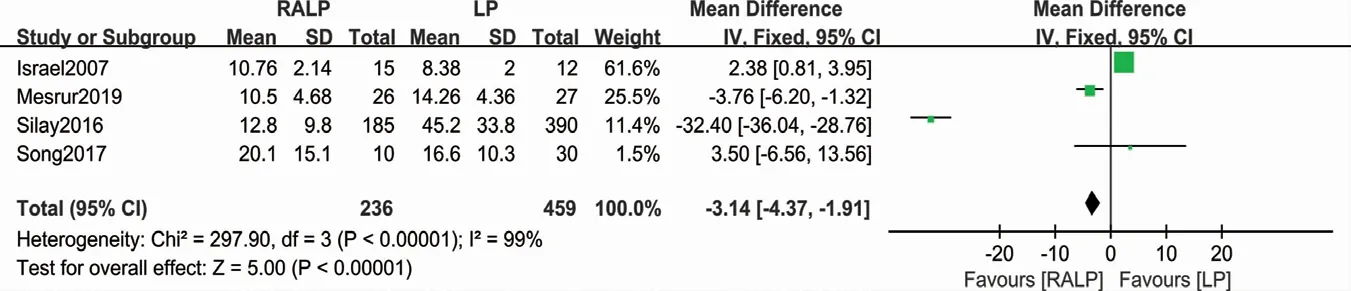
图8 肾盂输尿管连接处梗阻RALP和LP术后随访时间的Meta分析 RALP:机器人辅助腹腔镜肾盂成形术;LP:传统腹腔镜肾盂成形术Fig.8 Meta-analysis of postoperative follow-up time of RALP versus LP
(十)发表偏倚
对RALP和LP的手术成功率进行比较,纳入文献生成漏斗图,进行文献的发表偏倚检测,图形基本对称(图9),但目前机器人技术在小儿外科的开展仍处于起步阶段,公开报道的研究数量较少,且涉及病例也较少,因而发表偏倚难以避免。

图9 肾盂输尿管连接处梗阻纳入文献手术成功率的漏斗图Fig.9 Funnel plot of success rate in eligible studies
讨 论
UPJO是由各种原因引起的肾盂与输尿管连接处狭窄,其病因可分为:①肾盂输尿管连接处平滑肌纤维发育不良造成该部位狭窄或传导、蠕动功能障碍;②高位肾盂输尿管连接处局部变形扭曲;③输尿管起始部折叠;④异位血管或纤维索压迫等。尽早手术切除病变部位、解除梗阻是保护肾功能的关键[3]。
2002年,Gettman等[14]首次报道达芬奇机器人辅助腹腔镜行儿童肾盂成形术,此后达芬奇机器人系统辅助腹腔镜肾盂成形术也逐渐得到小儿外科关注。目前,国内陆续有多个医疗中心报道RALP在小儿UPJO中的成功应用[15-17]。与LP相比,RALP具有高分辨率的3D视野、去抖程序、高度灵巧的机械手臂、较短的学习曲线等优势[18]。但由于成本及术者经验等方面的原因,RALP手术在国内尚未普及。本研究旨在通过Meta分析,系统评价传统腹腔镜肾盂成形术及机器人辅助腹腔镜肾盂成形术对肾盂输尿管连接处梗阻的治疗效果。
一、手术成功率
本研究显示,RALP组手术成功率高于LP组。其中有8篇文献表明,RALP组的手术成功率高于LP组,且各项研究中两组手术成功率均大于90%[2-4,7,9-11,13]。也有2篇文献指出RALP组的手术成功率低于LP组[6,12]。其中Franco等[6]的研究表明,RALP组与LP组之间手术成功率差异较大(93.33%比100%),但考虑其报道时间为2007年,有可能是由于术者经验不足及机器人技术、设备的相对落后所致。而Song等[12]的研究中,RALP组1例失败,主要是由于该患儿肾动脉穿过左肾的下半部分,在移植过程中无法转位。因此我们认为,RALP及LP均是治疗UPJO的有效手术方式,随着术者经验的不断积累及机器人手术技术的不断发展,RALP的手术成功率总体高于LP组。
二、手术时间
本研究显示,虽然RALP组与LP组术中并发症的发生率及术中出血量差异无统计学意义,但RALP组的手术时间显著短于LP组,这与国内外大部分研究结果相符,需要注意的是,不同文献对于手术时间的定义存在差别,主要区别在于是否包括系统的安装、调试和机器人对接与解除对接的时间[2,4,6,9,21]。Esposito等[2]认为对接时间应包括在总手术时间内,因为这直接影响到儿科患者的整体麻醉时间[10]。RALP能减轻手术医师的工作强度,尤其是当手术时间较长时,可以同时保障肾盂输尿管的吻合质量[19]。机械臂的精细操作同样还能在游离、修裁肾盂输尿管组织及留置双J管时发挥巨大优势[3]。但一些研究发现RALP组的手术时间与LP组无差异甚至更长,这可能是由于达芬奇机器人不具备力学回馈系统,器械抓持力度主要基于操作者的视觉与经验[3,12,20]。研究表明,随着手术经验的不断积累、学习曲线的不断改善及机器人技术的不断进步,RALP的实际操作时间还有持续减少的可能[19]。
三、术后并发症发生率
本研究显示,RALP组术后并发症的发生率低于LP组,术后常见并发症包括尿漏、双J管移位、血凝块堵塞双J管、肾积水加重需再次手术等。术后并发症的发生率是评价手术疗效、反应患儿预后的指标。其中术后再手术发生率是评价疗效的重要指标,本文也就这一指标进行了单独分析,结果显示RALP组的术后并发症及再手术发生率低于LP组,表明RALP的疗效优于LP组;这可能得益于RALP组在操作上的精细与灵活[2-3,6]。
四、住院费用
目前国内外针对RALP组及LP组治疗费用比较的相关研究较少,本研究纳入文献的结果显示,RALP组的住院费用明显高于LP组[3,10]。但Casella等[5]报道的亚组分析结果表明,在使用顺行性支架管置入方式的患儿中,RALP组的住院费用较LP组更低,表明随着手术及机器人手术技术的发展以及器械成本、手术时间和住院时间的逐渐减少,RALP手术的费用也会逐渐降低。
五、术后住院时间及随访时间
分析显示,RALP组术后住院时间较LP组短,一方面表明RALP组术后恢复较LP组快,另一方面也可能是并发症影响了术后住院时间。同时不同地区的医疗保健方案存在差异,也可能影响术后住院时间[11]。但目前国内外对这方面的相关研究仍较少,且不够系统,需要进一步深入探索和分析。
综上,与传统腹腔镜肾盂成形术相比,机器人辅助腹腔镜肾盂成形术治疗小儿肾盂输尿管连接处梗阻手术成功率更高,术后并发症、术后镇痛药使用更少,手术时间、术后住院时间较短,且随访时间更短,表明术后恢复较传统腹腔镜肾盂成形术更快;同时患儿术后住院及随访期间因各种原因导致再次手术的发生率更低,也在一定程度上表明其远期疗效更好,但其费用较高,目前在小年龄婴幼儿患者中存在一定的局限性。
利益冲突所有作者均声明不存在利益冲突
作者贡献声明文献检索为李康明、邹兵,论文调查设计为杨平、李康明,数据收集与分析为李康明、邓睿、彭秋,论文结果撰写为杨平、李康明,论文讨论分析为杨平、李康明、邹兵、邓睿
