红外导引头工作原理及抗干扰措施分析
2022-05-24李石川刘国生
刘 杰,王 博,万 纯,李石川,刘国生
(中国航天科工集团8511 研究所,江苏 南京 210007)
0 引言
红外制导空空与地空导弹对战术飞机构成致命威胁,近期局部战争的统计数字表明,战争中损失的飞机有90%以上是被红外制导导弹击落的。按红外制导技术特征,红外制导导弹可分为4 个发展阶段,以“红眼睛”导弹为代表的第一代调幅调相式制导技术;以“毒刺”导弹为代表的第二代调频体制的制导技术;以“西北风”导弹、“毒刺-POST”导弹为代表的小视域探测器连续扫描制导技术(亦称第三代光机扫描技术);以“幼畜”导弹、“响尾蛇-9X”为代表的红外成像制导技术。红外制导技术的发展使红外制导导弹的制导精度不断提高,抗干扰能力不断增强。2022 年2—3 月,俄乌开战前 10 天内,俄罗斯就有“米-8/24/35”、“卡-52”等运输/武装直升机以及“苏-25/27/34”战斗(攻击)机等被乌军用“毒刺”导弹击落的报道。本文主要介绍了第一代、第二代、第三代、第四代红外导引头的工作原理,抗干扰措施,以及第五代红外导引头的发展趋势,为未来干扰弹的发展方向提供参考。
1 第一代红外制导导引头
第一代红外制导导引头采用旋转扫描体制,如图1 所示。导引头由一个同心扫描光学系统和置于光学系统焦平面上的调制盘组成。经典的旋转扫描调制盘(旭日升型调制盘)如图1(a)所示,这种调制盘的白色区域为投射状态、花纹区域不投射、黑色区域半投射。
当调制盘旋转时,目标像点在探测器上相间通过白色区域、花纹区域和黑色区域,形成图 1(b)所示的脉冲信号,目标像点越靠近调制盘边缘,信号幅值越大;同时,脉冲信号出现的时间与目标像点在调制盘上的角度有关。因此,通过脉冲调制信号可确定目标像点在调制盘上的位置,而目标像点在调制盘的位置反映了目标在空间的位置,对调制盘信号进行处理,形成制导指令,控制导弹飞行,使目标像点向幅值减小的方向运动,从而实现对目标的稳定跟踪。

图1 旋转扫描调制示意图
采用旭日升型调制盘可实现空间滤波,剔除背景干扰。其基本原理为:当点目标与云团(背景)均成像于调制盘上时,目标像点很小,云团尺寸则较大。当调制盘上半区域扫过目标时,像点被明暗相间的扇形格子透过或遮挡,探测器输出一列脉冲信号,下半区域扫过目标时,像点只有一半能量通过,形成一直流信号;当调制盘上半区域扫过云团(背景)时,云团面积很大,使得斩割作用小,探测器输出带有波纹的直流信号,当下半区域扫过云团时,只有一半能量通过,形成一直流信号(见图1(b))。信号经过后面的电子滤波电路以后,背景干扰的直流信号被滤除,代表目标信号的交流信号可以通过,从而达到剔除背景干扰的目的。
旋转扫描导引头本质上是一种调幅体制导引头,具有响应灵敏度差、存在调制盘盲区以及无法对干扰源进行鉴别的缺点,不具备抗干扰能力。
2 第二代红外制导导引头
第二代红外制导导引头采用圆锥扫描体制,如图2 所示。在圆锥扫描系统中,调制盘是静止的,通过随着陀螺仪扫描的锲子或倾斜的反射镜使目标像点在调制盘上章动。典型的调制盘做成一个辐条轮或类似的变体,如图 2(a)所示。当目标像点落在视场中心时,产生一个频率不变的载频信号,如图2(b)所示;当目标偏离光轴时,如果目标偏离光轴的方向大小不同,那么目标信号脉冲的间隔和时序都不相同,如图2(c)所示,根据此变化可将目标的偏差大小和相位解调出来,实现红外目标信号的脉冲位置调制。

图2 圆锥扫描调制示意图
与旋转扫描的幅度调制相比,圆锥扫描采用脉冲相位调制,具有灵敏度高、抗干扰能力强的特点。当干扰和目标同处于导引头视场中时,由于干扰和目标辐射强度以及运动轨迹的差异,形成信号的辐射强度、脉宽、频率等差异很大,采用特殊的识别算法可以将干扰剔除,因此,第二代红外制导导引头具备一定的抗干扰能力。
3 第三代红外制导导引头
第三代红外制导导引头不再采用调制盘,通过改进探测器、扫描方式、信号处理电路,使导引头抗干扰能力大大增强,典型代表为十字叉型导引头和玫瑰花扫描导引头。
3.1 十字叉型导引头
1)工作原理
十字叉型导引头系统由光学系统、探测器及信号处理电路3 部分组成。工作方式为圆锥扫描式,在像平面上产生像点扫描圆。像平面上放置十字叉型探测器阵列,目标像点以圆的轨迹扫过十字叉型探测器列阵。图3 为反射式光点扫描光学系统示意图。

图3 反射式光点扫描光学系统示意图
其信息处理电路原理方块图如图4 所示。方位和俯仰十字叉探测器臂产生的脉位调制信号分别输入到各自的前置放大器进行放大,然后馈入各自的对数放大器,再将对数脉冲信号分别经过各自的开关电路后,进入采样、保持缓冲电路,对来自基准信号发生器的正弦基准信号和余弦基准信号电压进行采样、保持,以产生瞬时的直流误差电压V和V,此瞬时直流误差电压大小由脉冲信号相对于正弦基准和余弦基准瞬时值的位置来决定,也就是由目标偏离光轴的失调角大小来决定,直流电压的极性由目标偏离光轴的方向来确定,因此,直流误差电压即可反映目标的方位信息。控制导引头向减小直流误差的方向运动,即可实现对目标的准确跟踪。
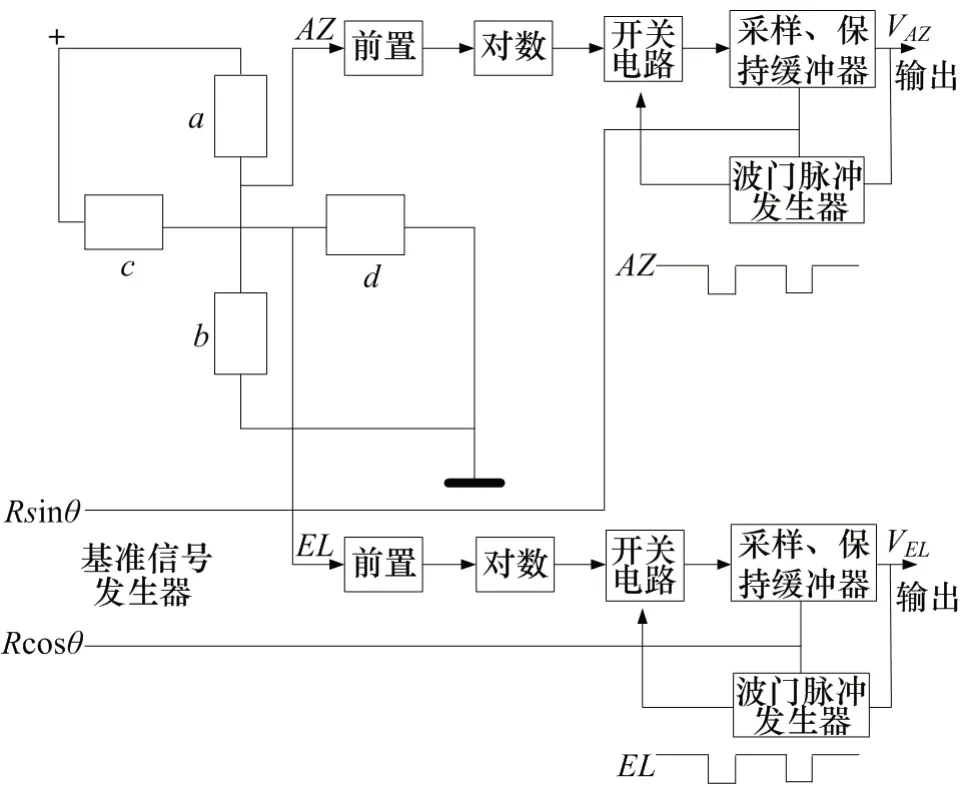
图4 十字叉型导引头信息处理电路原理方框图
2)抗干扰措施分析
十字叉导引头抗干扰措施包括波门选通技术、“开关”技术和“响应”技术。
从图4 可看出,十字叉型导引头采用波门脉冲发生器控制开关电路,只有在开关电路的门打开的时间内,目标脉冲进入波门,开关电路才输出一脉冲信号,这个脉冲信号对相应的基准信号采用保持缓冲后,输出一直流误差电压。此直流电压又反馈到波门脉冲发生器中与相应的基准信号进行比较,产生新的波门脉冲去套住下一个周期探测器产生的电脉冲。在波门脉冲未加到开关电路的其他时间内,开关电路不让其它脉冲或干扰信号通过,利用波门的选通作用,达到剔除背景和干扰的目的。
“开关”技术是通过导引头监视目标辐射的能量变化、记录、进行比较,如果在一个预定的时间界限内接收到的能量急剧增加并超过一个预定的门限值,则表示在导引头视场内有红外诱饵存在,系统切换到响应状态,处于响应状态的导弹将采取相应的响应处理措施,使之排除干扰的影响而跟踪真目标。除此之外,十字叉型导引头还可采用时间相位控制方法,实现抗干扰,该方法是基于目标与诱饵运动轨迹的差异,使红外干扰弹像点产生的脉冲处于预计目标脉冲的时间以外,系统仅接收预计时间内的脉冲,屏蔽或排除其它时间出现的脉冲,从而消除目标以外的其它辐射的干扰。
因此,十字叉导引头所具备的抗干扰措施主要有时间相关与视场收缩技术、幅值鉴别法、脉冲宽度鉴别法、脉冲时间鉴别法等。
3.2 玫瑰线扫描导引头
1)工作原理
玫瑰线扫描导引头使用2 个反向旋转的偏斜光学元件,偏斜光学元件可以是光楔、倾斜镜或者偏心透镜。把红外光学系统中常用的卡赛格伦系统的主反射镜和次反射镜各对光轴偏斜同一角度γ,并各自以和的转速绕光轴反方向旋转,以实现玫瑰线扫描。玫瑰线扫描光学系统示意图如图5 所示。

图5 玫瑰线扫描光学系统示意图
玫瑰线扫描轨迹方程为:

式中,为扫描花瓣长度,即视场半径,与偏斜角度有关,也与目标距离有关;、为主、次镜的转速(旋转频率)。
当沿玫瑰线轨迹扫过视场中的目标时,位于系统焦点上的红外探测器接收目标辐射产生的一个目标脉冲,对应的视场为玫瑰线扫描的瞬时视场;当玫瑰线轨迹扫完一个周期,其对应的视场为玫瑰线扫描的总视场。玫瑰线扫描获得的目标信息是以目标脉冲的形式出现的,而每一个目标脉冲都隐含了一个目标时间t,t与目标的方位息息相关,只要把视场中一个目标的方位信息()和()的信号电压分别叠加到位标器的偏航和俯仰进动线圈上,使之转向()、()减小的方向,直至()=()=0 时,位标器光轴(视线)对准目标为止。一旦目标偏离光轴(视线),就有()、()值出现,又“自动”地使之向视线方向转,实现自动跟踪目标的目的。
2)抗干扰措施分析
玫瑰线扫描导引头的主要抗干扰措施包括电子选通,以及基于亚成像体制的信号处理技术与计算机技术。
电子选通是基于干扰与诱饵运动轨迹的差异实现抗干扰。干扰弹在抛出一定时间内,由于运动轨迹差异,目标和干扰弹将不在同一扫描旁瓣内,通过计算目标的相对运动就可确定目标将出现在哪一个旁瓣,忽略其它旁瓣的信息,导弹可继续跟踪目标,电子选通技术本质上是基于脉冲时间差异实现抗干扰。同时,导引头还可根据目标与诱饵的辐射强度差异以及脉冲宽度鉴别诱饵和干扰。
作为一种亚成像机制,玫瑰扫描系统采用瞬时视场扫描总视场,可以实现总视场的空间分解,得到目标的亚图像。结合信号处理技术与计算机技术对图像进行预处理与图像识别,捕获跟踪目标区域,并采用预测跟踪的方式,在预测区域内识别要跟踪的目标,将大部分背景和干扰滤除。
因此,玫瑰线扫描具备的抗干扰措施包括:幅值鉴别法、脉冲宽度鉴别法、脉冲时间鉴别法、轨迹预测跟踪等。若导引头采用双色探测器,还可根据目标与干扰红外辐射光谱差异实现抗干扰。下面以“毒刺-POST”为例,具体分析该型导弹玫瑰线扫描导引头的抗干扰能力。
“毒刺-POST”的红外制导系统主要运用了玫瑰花瓣形准成像扫描技术,取消了“毒刺”导引头内的调制盘和分立元件,而代之以准成像扫描光学处理系统。这种玫瑰花瓣形准成像扫描系统的优点是,在总视场范围内扫描的探测器元件瞬时视场很小,探测器尺寸可以适当做小,元件噪声和背景噪声可大大下降,目标的信噪比提高,从而提高了抗自然与人为干扰的能力。采用逻辑电路以区分真目标与“噪声”(背景辐射、曳光弹等等)。逻辑的建立依据是背景一般要大于目标,因而可根据脉冲宽度鉴别出尺寸较大和尺寸较小的辐射源,从而只接收窄脉冲,拒收宽脉冲。还可以在观察若干顺序脉冲以后再决定是“接收”还是“拒收”。此外,通过使用微处理机,可将所接收的脉冲以脉冲幅度、脉冲宽度和其在目标空间所处的位置等形式按时钟脉冲频率加以存贮,再用“图形识别算法”确定其中哪些脉冲应当用于对目标的跟踪。这样,导引头就可以撇开非选定的红外源,而只跟踪选定的目标。
为进一步提高抗干扰能力,“毒刺-POST”还首次采用了红外/紫外双色跟踪技术,导引头内使用2 种探测器,一种是锑化铟,在红外波段(3~5 μm)工作,另一种是硫化镉,在紫外波段(0.3 μm 附近)工作。2 种探测器采用夹层叠置方式粘合为一,所获得的信息由2 台微处理机快速处理。对上述2 个通道内同时接收到的脉冲相对量值(能量比值)加以比较后,就能正确鉴别出哪些脉冲来自目标飞机,哪些脉冲来自背景或红外诱饵等干扰源。因此,采用准成像扫描、红外/紫外双色跟踪制导方式的“毒刺-POST”在制导精度和抗自然与人为干扰能力方面有了重大突破。
4 第四代红外制导导引头
第四代红外制导导引头主要采用成像体制。成像体制导引头可得到目标的丰富信息,具有很强的抗干扰能力,是现今红外制导导弹的主要发展方向。
4.1 工作原理
红外成像制导系统的核心部件是红外成像导引头,一般由红外摄像头、图像处理系统、图像识别系统、跟踪处理系统和摄像头跟踪系统等部分组成,其中图像处理和图像识别子系统是红外成像制导系统的核心。典型的红外成像制导系统如图6所示。
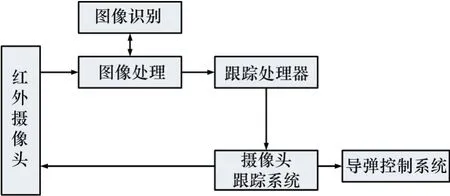
图6 红外目标跟踪系统
红外成像导引头通过探测目标与背景的温差形成红外图像,现今红外成像制导大都采用凝视成像体制。凝视成像采用一个凝视焦平面阵列,其材料为锑化铟或碲镉汞,为两维阵列制导探测像元。这些探测像元都集成在一块硅片上,硅片的另一面是同等数量的红外电荷耦合器件(CCD)。阵列上的每个探测元仅凝视景物的一小部分,所有像元组成阵列的总瞬时视场,阵列的总瞬时视场很大,抓住目标就不会再丢失。由于凝视焦平面阵列采用电扫描法扫描场景,对做大机动飞行的目标也能跟踪。同时,焦平面阵列具有很高的灵敏度,可以探测背景的温差为千分之几摄氏度的目标。对来自阵列的热数据采用适当的方法进行数字处理,结果可以得到目标信息和威胁程度的顺序排列。
4.2 抗干扰措施分析
红外成像系统对目标、背景、干扰成像后,可得到目标的丰富信息,经过图像预处理、图像分割、图像特征提取、识别,提取该目标的各种特征(包括目标大小、长度、宽度、灰度分布、平均灰度、最大灰度、灰度变化率、运动方向、运动轨迹、运动速度和运动加速度等),采用特定的跟踪算法对目标进行跟踪,不同的跟踪算法就形成了不同的抗干扰措施。红外成像导引头的跟踪措施主要包括形心跟踪、特征相关匹配跟踪和运动轨迹预测跟踪等,针对不同距离的目标以及不同的干扰,采用不同的跟踪措施,使红外成像导引头抗干扰能力大大增强。“毒刺RMP BLOCK Ⅱ”防空导弹为第四代的红外成像制导导弹,导弹最大射程8 km(有效射高3.8 km),最小射程200 m,最大速度数为2.2,最大过载大于20,制导系统采用(128×128)元 3~5 μm 中波凝视红外成像制导,视场角2°,发射前捕获锁定尾焰,发射后不管。采用焦平面阵列导引头对目标、背景、干扰成像,可根据目标的红外辐射特征、面目标特征、灰度特征、运动轨迹特征等识别目标和干扰,增强了制导精度、抗干扰能力及对抗低可探测性目标的能力,可在杂波信号下探测直升机。该导弹成功地运用了可编程控制微处理器,既可通过外部操作对制导与对抗软件重新编程以对付突然出现的空中威胁,又可使该导弹系统有能力对付漏网敌机和较近敌机,定位目标更加准确,抗各种红外干扰能力更强,具有全向攻击能力和较好的抗电子干扰能力,极大地提高了作战性能。
5 红外导引头发展趋势
红外探测器作为红外成像导引头的关键组件,随着现代材料技术和微电子技术的发展,正朝着高密度、多光谱、高响应度、高探测率、高工作温度及更大面积、更小探测单元、更高灵敏度的器件方向发展。下一代红外(成像)导引头将采用多光谱阵列成像的小型探测器,工作波段在3~5 μm 或8~12 μm,通过多光谱成像制导技术探测目标和背景的温差进行目标探测、识别和锁定,可以全方位探测、攻击目标。可通过辐射能量阈值、空间分布、双色鉴别、温度鉴别等手段剔除干扰。
6 结束语
本文主要介绍了红外导引头的工作原理及抗干扰措施。随着制导技术的快速发展,红外导引头从最初调幅体制的旋转扫描导引头发展到现今成像体制的导引头,抗干扰能力大大增强。现今广泛装备的第三代、第四代导引头可根据辐射能量阈值、脉冲宽度、脉冲时间、运动轨迹、辐射光谱等特性鉴别目标和干扰,正在发展的第五代双色成像体制导引头,将具备更强的抗干扰能力。未来红外干扰弹只有具备逼真模拟目标运动轨迹特征、辐射特征(辐射强度、辐射光谱)、面目标特征的能力,配合合理的战术运用,才能有效干扰先进红外制导导引头。