ADAS 融合系统架构及性能评测方法
2022-05-23王雪岩周明昊
郑 艳, 王雪岩, 周明昊
(华域汽车系统股份有限公司, 上海 200434)
随着传感器的类型在ADAS系统中应用的增加, 传感器融合系统应用越来越广泛, 常常采用目标级的融合方式来实现L3级以下的ADAS功能。 广义的融合系统分为3个层级,第1层级为传感器层级, 即车载毫米波雷达传感器、 车载摄像头传感器、 车载超声波雷达传感器等; 第2层级为融合算法层级, 其输入是传感器目标, 输出为应用功能所选择的融合后的目标; 第3层级为应用功能层级, 也是用户能够直接体验性能的功能效果部分。 如何评价融合系统尤其是功能层级的性能, ENCAP和CNCAP已经给出了多种场景下的打分机制, 然而, 这些机制只是为了评价融合系统功能的性能, 却未能对之前的传感器层级和融合算法层级提出性能需求。
随着系统分工越来越细, 系统各个层级均在前一个模块的输出性能确认的基础上, 才能够对本层级模块性能有一个充分的预期。 由此, 本文也将阐述对每一层级的性能进行评价的原则和方法。
1 ADAS融合系统的架构介绍
图1为基于目标的融合系统架构。
1) 在图1中, 融合系统分为3个层级, 位于最底层的第1层是传感目标层, 各个传感器采集到原始数据后, 通过信号处理和目标跟踪算法, 输出跟踪后的目标。 不同传感器的目标属性主要包含: 目标个数; 目标的横向/纵向距离;目标的横向/纵向速度; 目标的横向/纵向加速度; 目标类型; 目标运动状态等。

图1 融合系统的架构
2) 第2层是融合算法层。 传感器输入的跟踪后的目标输入到融合算法层, 融合算法根据目标的ID、 距离、 速度等设计目标关联策略, 将可以关联的目标重新计算目标的属性后, 输出给第3层。 在融合算法层, 融合目标的属性主要包含: 目标个数; 目标的横向/纵向距离; 目标的横向/纵向速度; 目标的横向/纵向加速度; 目标类型; 目标运动状态; 目标来源 (单传感器目标或关联后的目标) 等。
3) 最上层是应用功能层。 目前应用功能主要分为3大类: ①纵向功能, 主要是指AEB和ACC功能; ②横向功能,主要指LKA/LDP/ELK功能; ③横纵向功能, 主要以TJA功能为代表。
2 应用功能层的性能评价方法
国际标准化组织、 国标和各行业协会针对ADAS功能在场地的测试中的表现进行打分; 除此之外, 各OEM在行业标准评分的基础上, 对部分功能可能会提出比标准评分更高的要求。 图2为ENCAP (欧洲新车评估程序) 对ADAS系统的评分程序, 可以看到该程序中对ADAS功能需求的变化趋势。

图2 ENCAP2018-2025技术路线
图3为ENCAP组织最新版本 (2020版) 和CANCAP2021的积分规则, 从图中可以看出, 目前已经颁布的行业标准中, 评分标准主要集中在AEB (含AEB-car、 FCW、 AEBpedestrian、 AEB-bicycle)、 LSS (含ELK、 LDW、 LKA) 和SAS (包含TSR、 BSD) 功能。
随着ADAS在中国本土的应用, ENCAP (中国新车评价规范) 也开始推出符合中国道路和人群特点的评价规范。图3对ENCAP2020和ENCAP2021进行了对比, 可以看到二者在评价时的重点有所不同, 在评分标准上最大的不同在于针对中国的实际国情加大了AEB自行车/二轮车/行人的分值比例, 以及增加了BSD功能的计分。 图3中的缩略词释意如表1所示。

图3 ENCAP2020和CNCAP2021的评分对比
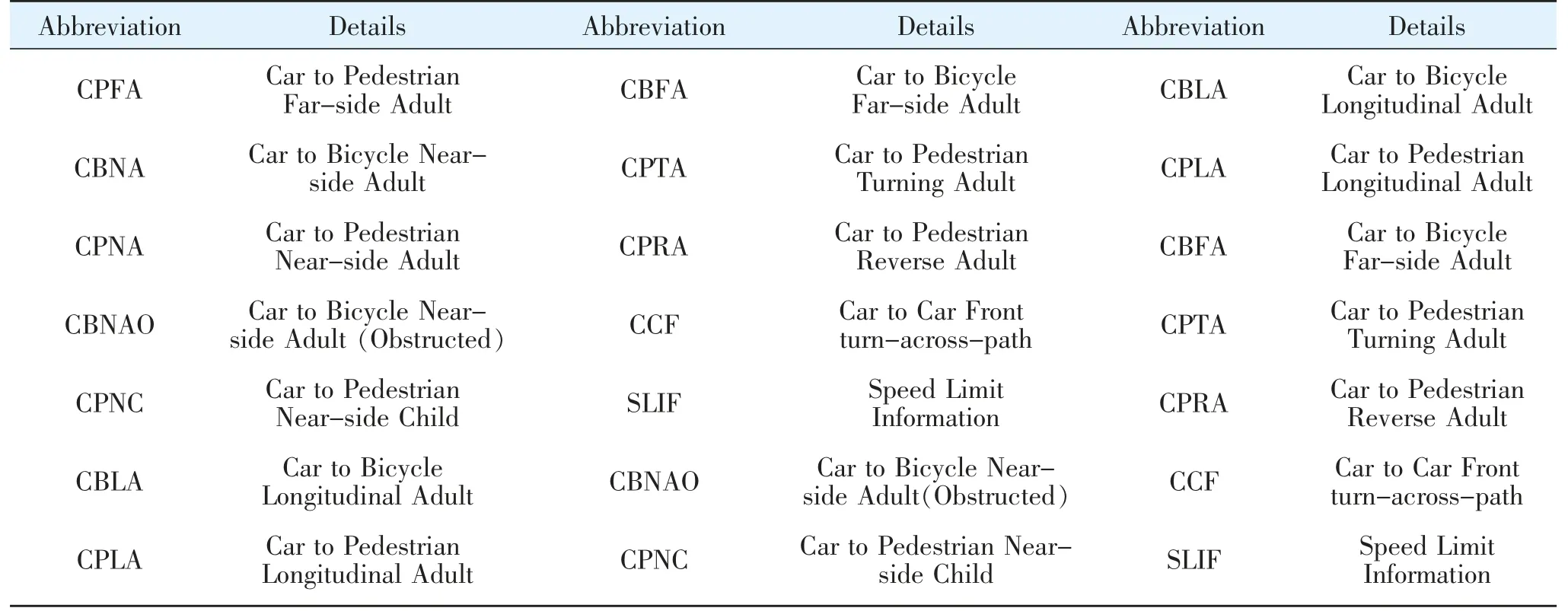
表1 缩略词表
系统功能能否有更好的客户体验, 除了对目标输入的准确度方面有要求, 测试车辆本身的性能也会影响驾乘体验。 为此, ADAS系统对测试车辆的ESC和EPS系统执行器也需要提出相关要求。
在纵向控制方面, ACC的加速度请求精度要求在0.1m/s,针对AEB的加速度请求精度要求在0.2m/s, 且控制跟随需要保证一致性和平行度, 对于平滑的控制信号执行器不能出现突变的控制结果, 且ESC能够配合ADAS的联合调试。
在横向控制方面, 当横向控制请求为扭矩信号时, 实际方向盘扭矩信号分辨率小于0.1Nm, 精度小于0.5Nm; 当横向控制请求为方向盘转角信号时, 实际方向盘转角信号分辨率小于0.1°, 精度小于1°, 且要求EPS实际方向盘转角信号相位延时小于200ms; 控制跟随保证一致性和平行度,对于平滑的控制信号执行器不能出现突变的控制结果, 且EPS能够配合ADAS进行联合调试。
3 融合算法层的评价方法
对融合算法进行评价的目的, 是为了使应用功能层能够得到尽可能小时延和高精度的融合目标。 为了得到融合算法本身的品质评价, 通常有两种方式: ①采用激光雷达作为真值的绝对评价; ②不采用激光雷达作为真值的相对评价。 两种的具体标注区别如表2所示。
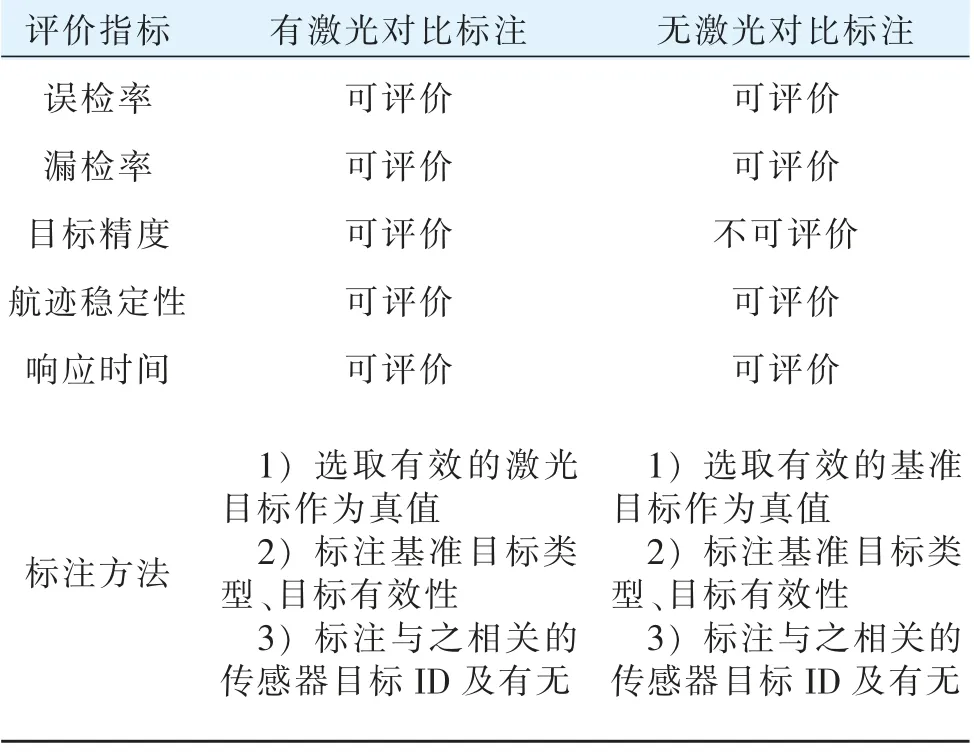
表2 融合算法评价方法在有无激光对比时的标注区别
4 融合系统(融合算法)对传感器的需求
在基于目标的1R1V融合系统的框架下, 对传感器的需求重点关注在跟踪后输出的目标。
4.1 融合系统对雷达传感器的需求参数
融合系统对雷达传感器的需求主要包含: 目标的探测距离、 目标的纵向距离精度、 目标的纵向速度精度、 目标的输出类型 (如车辆、 行人和/或护栏等)、 输出目标的特征 (障碍物目标/非障碍物目标; 车辆目标的长度、 宽度、RCS等)、 输出目标的个数、 目标刷新周期、 角度自校正范围、 遮盖模式、 大卡车目标的分裂概率。
4.2 融合系统对摄像头传感器的基本需求
融合系统对摄像头传感器的基本需求包括以下几个类型的对象。
1) 摄像头对车道线的识别的性能需求, 如表3所示。
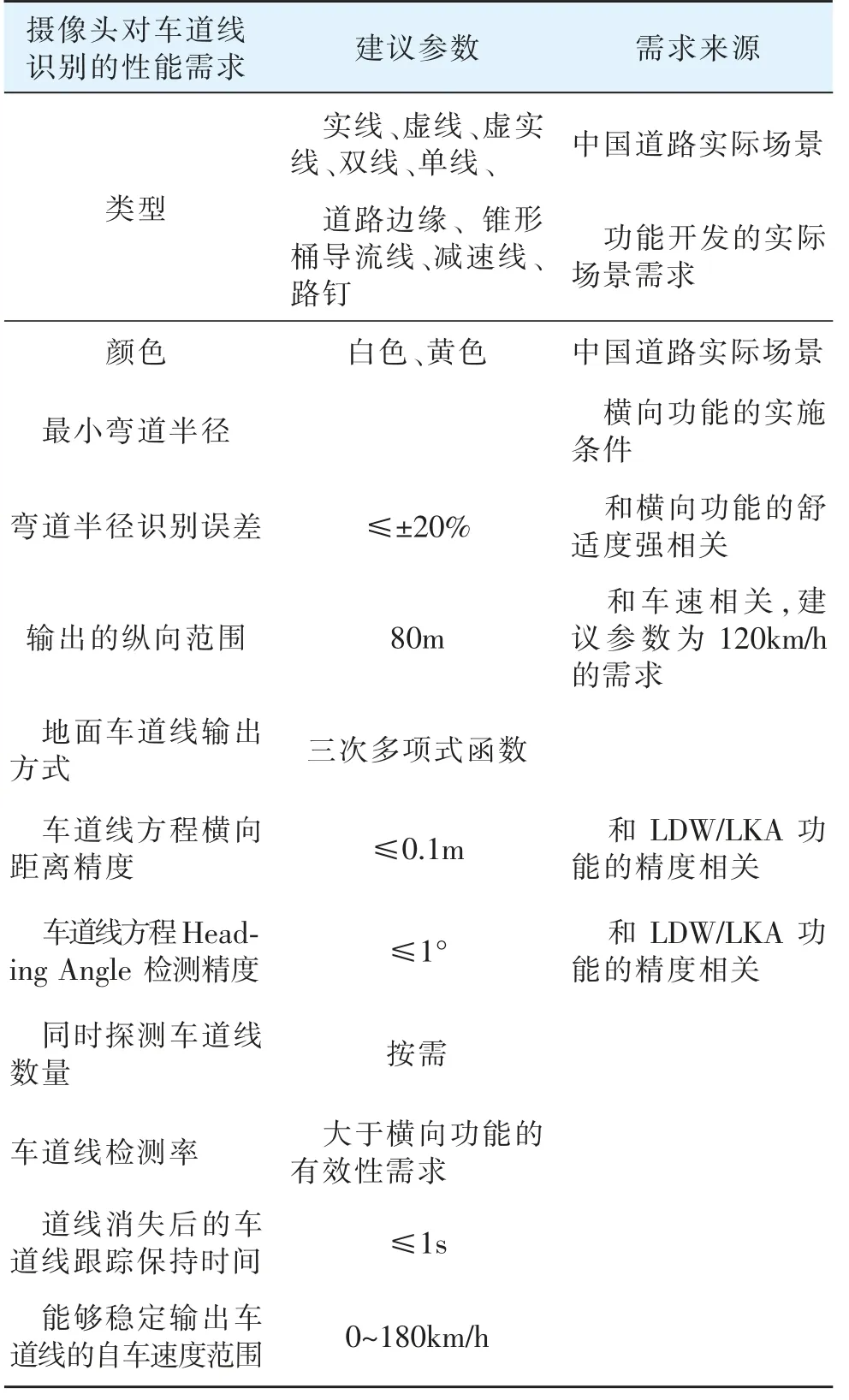
表3 融合系统对摄像头的车道识别性能需求
2) 摄像头对车辆目标的识别性能需求主要包含车辆类型、 车辆检测部位 (2D/3D)、 目标检测率、 ROI范围内的横纵向距离精度、 ROI范围内的目标横纵向速度精度、 摄像头对目标跟踪的稳定度、 车辆误检率、 车辆类型的误检率等。
3) 摄像头对交通标志的识别, 其性能需求主要包含限速标志类型、 限速标志目标正确检测率、 红绿灯检测类型、车辆红绿灯目标正确检测率、 红绿灯识别距离、 斑马线识别率等。
4) 摄像头对两轮车及行人的检测需求主要来自以下几个方面: 检测部位; 目标检测率; ROI范围内的横纵向距离检测精度; ROI范围内的横纵向速度检测精度; 目标跟踪的稳定度; 目标误检率等。
5) 摄像头对车灯目标的检测需求: 包含对向来车前车灯光最远检测距离; 同向行驶车辆尾灯最远检测距离; ROI同向行驶车辆制动灯最远识别距离; ROI同向行驶车辆转向灯最远识别距离等。
6) 摄像头对其他障碍物的识别需求: 龙门架识别距离、 龙门架识别正确识别率、 路牌识别距离、 路牌识别正确识别率等。
5 结语
融合系统的性能是传感器性能、 融合算法性能、 车身性能、 应用功能性能均相关的的整体, 为了在CNCAP或者ENCAP测试中拿到更高的分数, 需要对该系统各个层级提出对应的需求。
