超高速移动下5G随机接入技术研究
2022-05-22马晓闯王东明宋铁成王海龙
马晓闯,王东明,宋铁成,王海龙,刘 奇
(1.东南大学 移动通信国家重点实验室,江苏 南京 210096;2.东南大学—泰通科技铁路5G移动通信联合研发中心,江苏 南京 210000;3.南京泰通科技股份有限公司,江苏 南京 210039)
0 引言
随机接入过程指用户设备发送随机接入前导码并在基站接收,进而实现上行同步及上行数据传输[1]。用户设备移动产生的多普勒频移,会使接收端对随机接入信号解析时,在相关峰两侧各产生一个伪峰,进而影响检测性能。针对此问题的研究主要在合理设置循环移位保证多普勒频移造成的伪峰不影响其他前导序列的相关峰[2],通过频偏补偿来减小频偏对随机接入检测的影响,另外通过精准的门限设置降低错检概率。
当速度达到超高速时,最大多普勒频移大于随机接入一个子载波间隔,能量会泄露到相关峰两侧共4个伪峰处,这使得已有前导序列的生成方式和检测算法不能很好地适应需求。
本文针对超高速速度产生的多普勒频移,在随机接入发送端使用5G NR新增的限制集B以保证5个检测窗口不会重叠[3]。在此基础上,利用五窗口检测法对随机接入前导序列进行检测,通过检测序列峰值及相关信号的概率分布来设置门限,并通过阈值的方式来进一步提高检测成功率,降低误检率。通过分析和仿真结果显示,该算法可以有效地化解多普勒频偏对随机接入前导序列检测带来的影响,提高了检测质量。
1 5G系统随机接入模型
1.1 PRACH结构
随机接入主要包括 PRACH 信号的发送和接收[4]。PRACH 信号由UE发送,eNode B接收并进行接入检测,这两个过程都在PRACH信道进行[5],PRACH 信道是专门分配给随机接入使用的信道,PRACH在时频域上的位置,如图1所示。
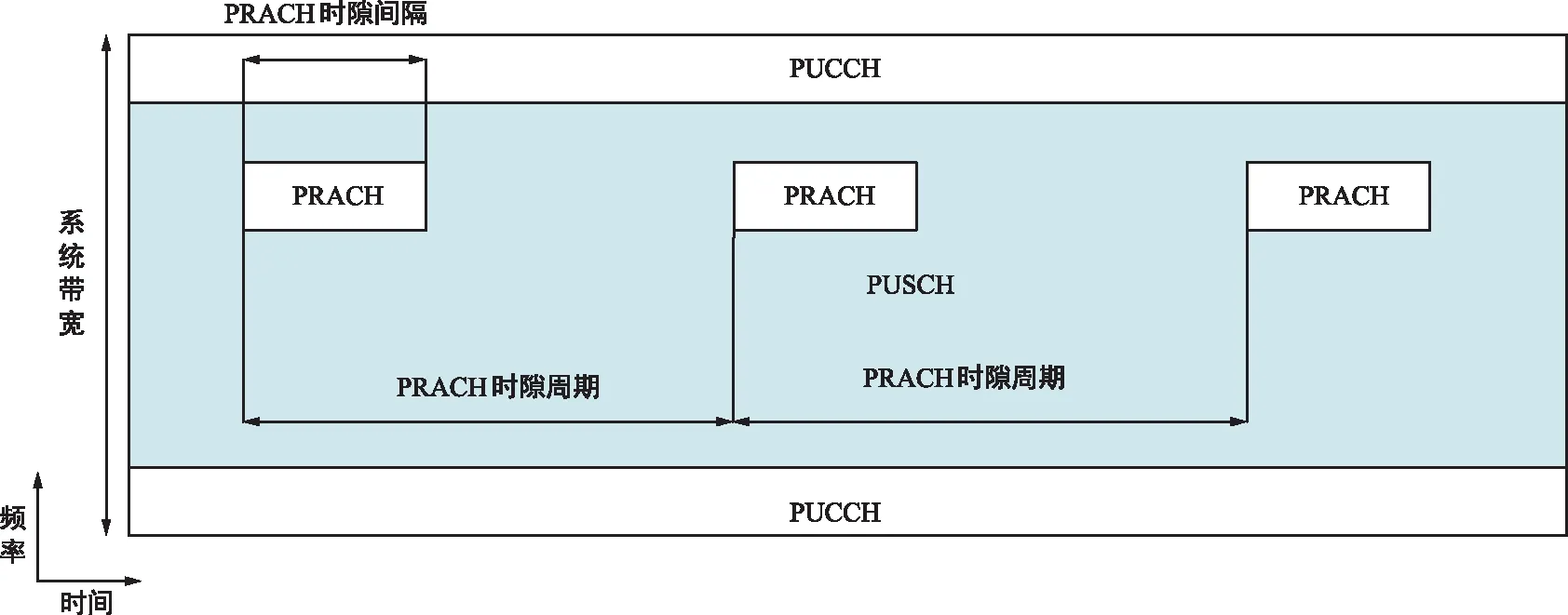
图1 PRACH在时频域的位置Fig.1 Position of PRACH in time domain and frequency domain
PRACH前导序列是一个包含CP的OFDM符号的复数序列,由循环前缀、前导序列和保护间隔三部分组成,如图 2 所示。CP是随机接入序列的尾端截取所得,前导序列与PRACH时隙长度的差为保护间隔,从而为抵消传播时延提供了保护空间。

图2 随机接入前导格式Fig.2 Random access preamble format
在随机接入过程中,基站通过分配给用户不同的前导序列来区分不同用户, 并估计不同用户的传输时延。LTE 系统的随机接入前导码由 ZC序列生成,因为ZC序列具有恒包络零自相关特性[6]。ZC序列的数学表达式为:
(1)
其中,u为 ZC 序列的根指数,取值范围为{1,2,…,NZC} ;NZC为 ZC 序列的长度,NR支持4种长度为839的长前导码随机接入格式,以及9种长度为139的短前导码随机接入格式,如表1所示。
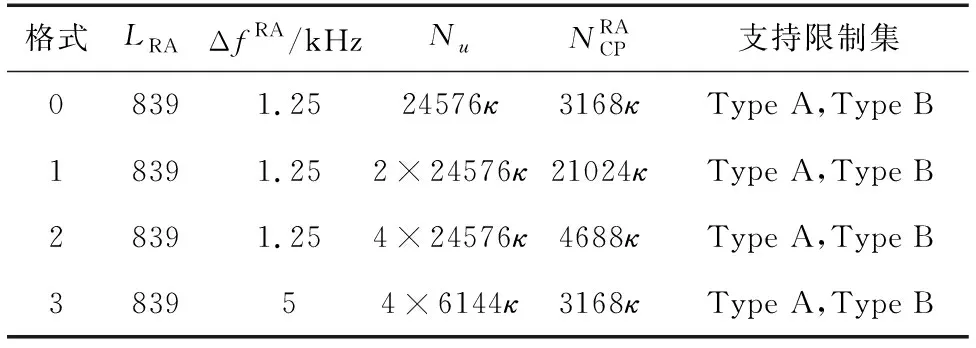
表1 LRA=839的随机接入前导码格式且子载波间隔 ΔfRA∈{1.25,5} kHzTab.1 LRA=839 random access preamble format and subcarrier spacing ΔfRA∈{1.25,5} kHz
xu,ν(n)=xu((n+Cv)modNZC),
(2)
式中,xu(n)是 ZC 序列的根序列,xu,ν(n)是由xu(n)循环移位产生的,循环移位大小为Cv。对于非限制集,Cv=v·NCS,其中,v表示 ZC序列循环移位参数,NCS表示循环移位偏移值。循环移位大小Cv取决于前导 ID,因此每个随机接入前导都有一个特定的前导ID,同时也有一个特定的Cv。ZC 序列具有特殊的自相关和互相关特性,使得来自于同一 ZC 根序列,不同循环移位大小Cv的用户能被基站区分开[7]。
GP的大小与系统覆盖距离有关,GP越大,覆盖距离越大。GP主要由传输时延和设备收发转换时延构成[8]。忽略UE从下行接收到上行发送的转换时间,GP等于2倍的传输时延。系统的最大覆盖距离便为传输时延与光速的乘积。对于格式1,其GP=0.715 63 ms,所以最大小区半径d为:
(3)
1.2 PRACH系统模型
随机接入系统模型主要包括发送端和接收端2个模块。在发送端模块,用户通过eNodeB的广播信号获得高层配置参数μ(ZC序列根序列号)和υ(ZC 序列循环移位参数),按照获得的参数在时域频域分配资源,生成随机接入前导序列,经过FFT将前导序列变换到频域再进行子载波映射,对映射后的信号进行快速傅里叶逆变换 (IFFT),得到时域信号,进行并串变换后插入保护间隔 (CP、GP),最终生成射频信号。不同用户的射频信号经过不同的信道到达接收端;在接收端模块进行峰值检测[9],首先考虑接收信号起始点的位置,去除CP、GP,并对FFT后的信号进行子载波解映射,得到接收信号频域前导序列。在本地生成所有不同根序列号的ZC序列,对其进行DFT变换,取共轭与接收信号频域前导序列相乘[10],得到来自不同用户的峰值检测序列,对不同用户进行判决,确定用户是否发起随机接入,获得时间提前量(Timing Advance ,TA)[11]等信息用于用户定时同步。
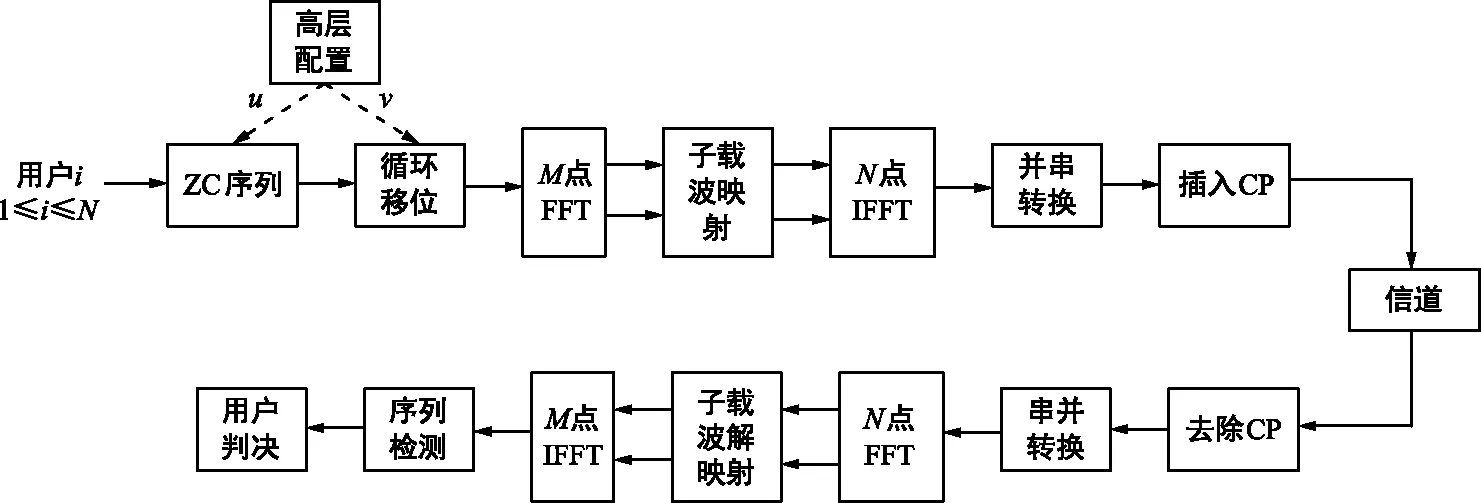
图3 随机接入系统模型Fig.3 Random access system model
2 高速模式随机接入算法
2.1 多普勒频移对PRACH的影响
由于UE设备高速移动,产生了多普勒效应[12],多普勒频移的数学表达式为:
(4)
其中,c为光速,v为 UE 和 eNode B 的相对运动速度,θ为 UE 移动方向与入射波方向的夹角,f为 5G随机接入信号的载波频率,在理想情况下,5G频段的载波频率f=3.5 GHz 。
(5)

(6)
式中,乘积项udu对应采样点偏移后的根索引。从式(7)中可以看出:高速产生一对侧峰会出现在距离主峰du处[13]。如图4所示,在主峰两侧各出现一个侧峰值。
(a) 多普勒频移为100Hz时
(b) 多普勒频移为1000Hz时图4 在多普勒频移分别为100 Hz、1 000 Hz时的互相关Fig.4 Cross correlation at Doppler shifts of 100 Hz and 1 000 Hz respectively
2.2 限制循环移位理论
针对高速环境带来的多普勒频移问题,标准给出了一种利用一定限制条件生成前导序列的方法来消除频偏对前导检测带来的影响。前文分析了高速模式下频偏对相关峰位置的影响,相关峰主峰两侧固定位置会出现2个伪峰,提出对同一前导的设置3个检测窗口进行合并检测,但是需要一些约束条件使得移位后生成的前导序列的检测窗口互不重叠,这个约束条件就是循环移位限制理论[14-15]。
循环移位限制理论需要满足下述条件:
① 任意循环移位前导的左右2个辅助窗口不能与其自身的主窗相互重叠。
② 任意循环移位前导的左右2个辅助窗口不能和其他循环移位前导的3个窗口重叠。
③ 2个循环移位间的距离不能小于NZC。
2.3 超高速下的PRACH
对飞行器来说,其移动速度达到超高速,导致频偏超过一个PRACH子载波间隔,即Δf>ΔfRA时,将多普勒频移表示为Δf=KΔfRA+δf。K表示一个大于1的整数,δf表示小数部分的多普勒频移,范围取0<δf<ΔfRA。可以将接收端受频偏作用后的前导序列写为:
(7)
对式(8)进行化简得到:
xu(n-(K+1)dumodNZC)·
(8)
xu(n,Δf)=xu(n-(K+1)dumodNZC)·exp(jφu)。
(9)
由式(8)可以看出,当频偏大于一个PRACH子载波间隔时,会产生多个伪峰,如果用Cv来表示相关峰主峰位置,那么会在Cv±du、Cv±2du或Cv±(K+1)du产生多个伪峰,即伪峰数量不再是主峰两侧各一,而是主峰两侧多个可能位置[16]。
2.4 三窗口联合检测算法
高速模式随机接入检测的一般流程包括:将接收到的序列与本地频域 ZC 序列做相关、加窗、进行峰值搜索、PDP计算能量、判决门限即阈值的设定、判决及时间提前量TA计算。地面高速场景下的接入检测也是利用了 ZC 序列的自相关和自相关性质下的互相关性,这点与中低速小区的检测相同。不同的是高速环境下进行接入检测时,由于峰值能量泄露,在检测开始前,需先进行能量合并。因为泄露的能量主要集中在主峰的左右2个伪峰,所以在能量合并时需要有3个窗来进行合并,即主窗、左副窗和右副窗。地面高速场景下的随机接入检测流程如图5所示,同时给出了高速模式增加部分。

图5 高速场景下的PRACH前导序列的一般检测流程Fig.5 General detection procedure of PRACH preamble sequence in high-speed scene
2.5 双门限五窗口检测算法
在超高速移动速度情况下,如果采用上述三窗口检测算法,随机接入随机序列的能量泄漏到(Cv±du)modLRA处以及(Cv±2du)modLRA处。因此,在三窗口检测方法的基础上进行改进,在基站侧采用五窗口检测。并且考虑到频偏和门限对检测性能的影响,添加判决门限[17],以此增加前导信号检测成功率,降低误检率。
为提高检测成功概率,需要将主峰处和侧峰处的能量进行合并,再进行检测。在实际操作中,5个搜索窗起始位置为((Cv±du)·NIFFT/NZC)modNIFFT,(Cv·NIFFT/NZC)modNIFFT,((Cv±2du)·NIFFT/NZC)modNIFFT,之后可使5个窗口中的峰值功率合并相加。
为降低虚警概率,本文对接收信号在FFT后,再通过DCT方法进行噪声过滤,以降低噪声对前导信号的影响,然后再求得噪声门限。在本文中,通过去除5个窗口中的峰值后的所有检测序列功率平均值来计算噪声门限,噪声门限一定低于前导信号的峰值,如式(11)所示:
(10)
添加门限的前导码前侧算法步骤如下:
步骤①:对前导码峰值maxValue和与峰值相距(du·NIFFT/NZC)modNIFFT,(2du·NIFFT/NZC)modNIFFT处的5个信号进行叠加。
步骤②:若maxValue>T1·TNoise或5个信号叠加后的值大于T2·TNoise,则判断有UE接入。
步骤③:在5个检测窗口内对窗口内的最大值进行叠加合并,如果合并窗>T3·TNoise,则随机接入检测成功,5个窗口中最大峰值所在位置相对搜索窗起始位置偏移量为TA。
2.6 自适应随机接入检测算法
在单RRU接收的条件下,可以根据移动速度选择采用三窗口和五窗口检测算法。然而采用单个RRU接收前导序列并进行检测的算法性能较低,本文提出一种多RRU接收条件下单自适应随机接入算法。在行驶路线固定,并且路线上均匀分布多个RRU的情况下,分析在有两个RRU接收,根据两个RRU接收信号的功率,自适应选择最合适的算法,以此提升前导序列检测成功率、降低算法复杂度。
如图6所示,当飞行器移动时,飞行器飞行方向与入射波夹角θ随着位置的变化而变化。当飞行器靠近其中一个RRU时,其夹角θ接近90°,多普勒频偏相对与另一个RRU接收的前导序列信号更低。同位置处距离两个RRU距离不同,而距离的不同会使得信号到达两个RRU的能量有所不同。当飞行器与其中一个RRU距离较近时,此时这个RRU接收到的信号能量会远大于另一个RRU接收到的信号。
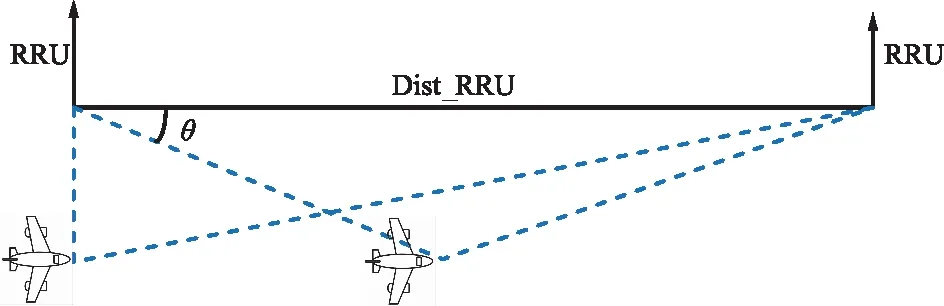
图6 双RRU随机接入场景Fig.6 Dual RRU random access scenario
此时,距离较近的RRU产生的多普勒频移会在一个子载波间隔内。因此采用自适应算法,设置临界值Dist_board,当飞行器与一个RRU的距离在Dist_board内时,采用三窗口检测算法可以降低检测算法复杂度、增加检测成功率;否则,将2个RRU接收到的前导序列信号叠加,采用五窗口检测算法,通过2个RRU接收端信号的合并,增加检测成功率。本方法不仅能因为2个RRU接收信号叠加而提高检测成功率,还可以降低随机接入检测算法复杂度。
3 算法仿真结果及分析
为了评估本文所提前导序列检测算法的性能,详细介绍本文算法对于随机接入信号检测过程中的仿真结果。本次仿真中的信道环境为簇延时线模型(Clustered Delay Line,CDL)信道,对高速移动情景下的随机接入前导进行检测,对比分析算法的检测性能。具体仿真参数如表2所示。

表2 物理随机接入信道仿真参数Tab.2 Physical random access channel simulation parameters
根据3GPP要求[18],物理随机接入信道的检测率至少是99%,对应的漏检率不超过1%,误检率不超过0.1%。
对三窗口检测算法在多普勒频移为500 Hz和1 500 Hz下进行仿真,如图7所示,当多普勒频移在500 Hz,检测成功率符合标准要求。当多普勒频移在1 500 Hz,大于一个子载波间隔时,接收到的前导序列信号能量泄漏到5个窗口处,采用三窗口检测算法检测成功率出现明显的降低,不符合标准要求。

图7 500 Hz和1 500 Hz多普勒频移下的检测成功率Fig.7 Detection success rate under 500 Hz and 1 500 Hz Doppler frequency shift
当系统覆盖距离大于70 km时,选择前导码格式1发送前导码序列。共有3个阈值参数,其中T1、T2、T3需要大量的仿真实验以确保虚警率始终在0.1%以下,T1值经仿真后设置为9,T2为13,T3为18。
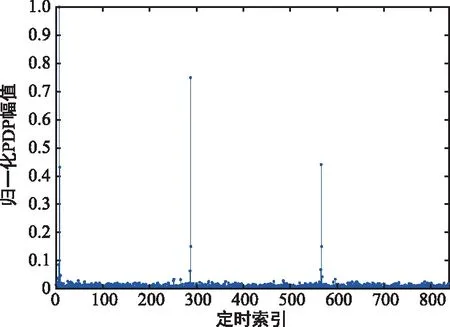
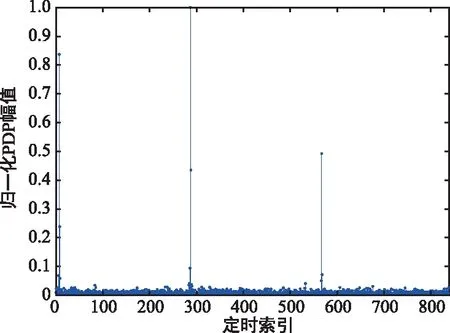
图8表示出了在CDL信道模型下且频偏为2 000 Hz时,采用五窗口算法及添加门限五窗口算法的漏检概率和虚警概率。在超高速速度下,由于频偏很大,传统的三窗口频域相关检测算法已经不适应。从图中可以看出,对于前导序列的虚警概率,添加门限五窗口检测算法在-20 dB处满足3GPP要求,且五窗口检测算法与添加门限五窗口算法分别在-10.1 dB和-12.2 dB处满足漏检率的要求。很显然,由于采用改进二次阈值门限判决,联合检测算法的性能具有更低的漏检概率和虚警概率,相对于五窗口检测,检测性能有着明显的改善。

(a) 五窗口算法虚警率

(b) 五窗口算法漏检率图8 2 000 Hz多普勒频移下五窗口算法虚警率与漏检率Fig.8 False alarm rate and missed detection rate of five window algorithm under 2 000 Hz Doppler shift
在2个RRU当作随机接入接收端的情况下,检测算法的成功率上升,且计算时间与复杂度下降。设置2个RRU的间距Dist_RRU为100 m,在每隔20 m的位置对随机接入检测成功率进行计算。
仿真采用ZC序列,利用其良好的自相关特性和互相关特性,对其进行峰值功率检测。对传统的频域相关检测算法、三窗口检测算法、二次阈值检测算法、改进五窗口检测算法以及本文算法进行仿真对比分析。
从图9(a)可以看出,由于频偏很大,传统频域相关检测算法在超高速移动场景下检测成功率为0;三窗口检测算法漏检概率很大,不满足需求。本文算法和改进五窗口算法分别在-12.9 dB和-12.1 dB处满足要求,本文算法可以在减小计算复杂度的同时,有效抵抗大频偏对前导检测的影响,增加前导码检测成功率。

(a) 不同算法的漏检率
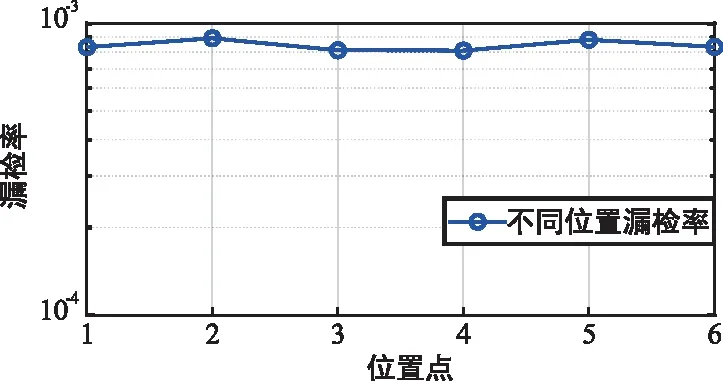
(b) 不同位置处的漏检率图9 2 000 Hz多普勒频移自适应改进算法漏检率Fig.9 Missed detection rate of Improved Doppler frequency shift adaptive algorithm at 2 000 Hz
图9(b)则表示在距2个RRU不同位置处进行随机接入自适应检测的漏检率,设置其信噪比条件为-10 dB,仿真其在距两RRU不同位置处的漏检概率,可发现在不同位置处均满足要求。由此可见,本文提出的自适应检测算法均可有效满足前导检测成功率要求。
4 结束语
本文主要针对高速移动下5G随机接入技术进行分析,为了提高移动终端对无线通信系统的接入能力,从理论上分析了终端高速移动对物理随机接入信道在基站侧检测性能的影响,并介绍了三窗口联合检测算法、改进的双门限五窗口检测方法以及自适应检测算法。通过仿真实验对比了传统频域相关检测算法、三窗口检测算法、二次阈值检测算法、改进五窗口检测算法以及本文算法,结果显示在超高速度下,双门限五窗口检测算法满足漏检率及虚警率要求。本文依据距RRU距离而自适应切换的随机接入检测算法,在减少运算复杂度的基础上有着更好的漏检率与虚警率表现。