基于遗传算法的卫星干扰源定位构型优化方法
2022-05-22柏如龙施健康霍立寰黄鹏辉陈建峰
柏如龙,施健康,霍立寰,陈 兵,黄鹏辉,陈建峰
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.河北省电磁频谱认知与管控重点实验室,河北 石家庄 050081;3.中国人民解放军32027部队,河南 开封 475000;4.上海交通大学 电子信息与电气工程学院,上海 200240)
0 引言
近年来,卫星通信业务快速发展,已广泛应用于电视转播、通信广播、导航定位、气象预报、资源探测等多个领域。随着卫星通信业务的迅猛发展以及新技术的出现,卫星所处的电磁环境日益恶化,且容易受到其他卫星和地面辐射源的干扰,对卫星电视、卫星通信等业务带来较大影响[1-3]。辐射源位置是无线电信号重要的技术参数,高轨卫星干扰源定位具有覆盖范围广、性能稳定的优势,是无线电频谱监测的重要手段,对卫星通信业务的正常开展、卫星广播电视节目的安全播出具有重要意义[4-5]。
现有的干扰源定位技术以双星时频差、多星时差方法为主[6-9]。相比于双星时频差定位方法,多星时差定位能够适用于运动目标,并且对星历误差的要求不高。多星时差定位方法主要受到时差测量精度、参考站位置和卫星定位构型有关,其中卫星定位构型是影响定位效果的主要因素。目前在卫星干扰源定位领域,学者们集中于时频差测量、定位算法等问题上,在定位构型方面,仅仅考虑了基于典型构型的定位误差分析,而鲜有对定位构型进行设计和优化的研究[10-15]。
针对上述问题,本文提出了基于遗传算法的卫星干扰源定位轨位设计方法。首先基于卫星干扰源定位原理,推导了卫星定位的几何稀释度(GDOP)计算方法,然后针对卫星干扰源定位设计了遗传算法中的轨道设计编码、基于排序的适应度分配、轮盘赌选择、精英保留策略等遗传流程。该方法能够快速地获得干扰源定位构型结果,算法仿真和实星星历仿真验证了优选结果为在给定条件下的最优构型。
1 卫星定位GDOP计算模型
如图1所示,一颗主星与两颗邻星构成了干扰源定位系统,当干扰源目标朝向主星发射干扰信号时,旁瓣的能量泄露到两颗邻星上。

图1 卫星干扰源定位几何示意Fig.1 Configuration of thesatellite interference source location
受卫星定位构型、目标地理位置等因素的影响,目标到各个卫星的传播路径长度存在差异。通过时频差测量技术能够获得主邻星的时频差,设目标与主星和邻星一的到达时差为TDOA1,目标与主星和邻星二的到达时差为TDOA2。根据主邻星时差和卫星轨道位置,利用多星定位算法能够反演出目标的地理位置。因此,目标的定位精度主要与主邻星时差的测量精度和卫星定位构型有关。
设目标位置坐标为(x,y,z),主星位置坐标为(x0,y0,z0),邻星一的位置坐标为(x1,y1,z1),邻星二的位置坐标为(x2,y2,z2),则卫星时差定位的方程如下:
(1)

利用高斯迭代等方法能够对多星时差定位方程进行求解,从而获得目标位置。从卫星时差定位方程可以看出,目标定位精度主要受到星历误差、时差测量误差、目标位置等因素的影响。为了更好地掌握多星定位性能,需要开展定位误差分析。
对式(1)中的时差方程取微分,可得:
dr10=dr1-dr0=
(2)
令:
(3)
得到:
dr10=F1xdx+F1ydy+F1zdz-F1xdxl-F1ydyl-F1zdzl-
(F0xdx+F0ydy+F0zdz-F0xdx0-F0ydy0-F0zdz0)=
(F1x-F0x)dx+(F1y-F0y)dy+(F1z-F0z)dz+(K0-K1),
(4)
其中,
K1=F1xdx1+F1ydy1+F1zdz1(l=0,1,2)。
(5)
对式(1)中的地球椭球方程取微分,可得:
(6)
将式(4)和式(6)表示成矩阵形式,得到:
(7)
表示成矢量形式为:
DΔr=F·Dr+Ds,
(8)
其中,DΔr,Dr,Ds,F分别为时差测量误差、目标定位误差、星历误差、目标与卫星的几何关系。具体含义如下:
(9)
(10)
(11)
(12)
由伪逆法可得,定位误差估计值为:
Dr=C(DΔr-Ds),
(13)
其中,
C=(FTF)-1FT,
(14)
可以看出各个时差的测量中,都含有星历测量的信息,导致每个时间差测量值都有相同的误差因素,所以说在各处的测量误差中,它们是相关连的。假定经系统修正后,测量误差是零均值;接收机的位置误差不变(每次的测量中);接收机的位置误差与它们误差各元素之间不相关,那么定位误差的协方差可以表示为:
Pdr=C{cov(DΔr)}CT=
C{cov(DΔr)}CT。
(15)
由定义可得:
(16)
可得:
Pdr=C{cov(DΔr)}CT=
(17)
定位精度的几何稀释度为:
(18)
2 基于遗传算法的轨位设计方法
卫星定位的定位精度受定位构型的影响较大,而卫星发射和变轨的代价巨大,提前进行卫星干扰源定位的轨道设计具有重要意义。卫星干扰源定位的轨道优选属于一类复杂的非线性问题,尚未有有效的求解方法。枚举类的搜索算法从理论上能够遍历搜索得到最优的定位轨位,然而计算量代价巨大。遗传算法是一种借鉴进化机制和选择机制的智能搜索算法,在对需解决的问题进行对应的遗传算法建模后,能够较好地解决非线性优化问题[16-19]。在基于遗传算法的卫星定位轨位设计中,基于二进制编码方法将卫星轨位映射到二进制编码字符串上,通过建立多个个体组成的种群,基于定位误差GDOP计算适应度函数,利用单点交叉和变异操作,采取精英保留策略,经过一定的遗传代数收敛得到轨位设计结果。
结合遗传算法和卫星干扰源定位方法,设计出基于遗传算法的卫星轨位设计方法,算法流程图如图2所示。

图2 基于遗传算法的定位构型优化流程图Fig.2 Diagram of location configuration optimization method based on genetic algorithm
2.1 轨位设计编码

(19)
种群中单个个体由3颗卫星构成,则单个个体的二进制编码表示为b=(b1b2b3)。
2.2 基于GDOP排序的适应度计算
为了避免适应度差距过大,而过早收敛,采用基于排序的适应度计算方法。适应度取决于个体在种群中的序号,而不是实际的代价函数值。个体的排序根据卫星定位构型的GDOP值进行排序,GDOP值越小,则排序的位置越靠前。设定M为种群大小,线性排序的适应度计算公式为:
(20)
其中,1≤η+≤2,η-=2-η+。
2.3 轮盘赌选择
轮盘赌选择方法类似于博彩游戏中的轮盘赌,个体适应度按比例转化为选中概率。将轮盘分成10个扇区,因为要进行10次选择,所以产生10个[0,1]之间的随机数,相当于转动10次轮盘,获得10次转盘停止时指针位置,指针停止在某一扇区,该扇区代表的个体即被选中。
2.4 交叉和变异
在种群中任意挑选经过选择操作后种群中两个个体作为交叉对象,即两个父个体经过染色体交换重组产生两个子个体,通过随机产生一个交叉点位置,父个体1和父个体2在交叉点位置之右的部分基因码互换,形成子个体1和子个体2。类似地完成其他个体的交叉操作。
效法自然界生物变异。生物性状的变异上控制该性状的基因码发生了突变,这对于保持生物多样性是非常重要的。模仿生物变异的遗传操作,对于二进制的基因码组成的个体种群,实现基因码的小概率翻转,即达到变异的目的。
2.5 精英保留策略
精英保留策略可以避免最优个体不会因为杂交操作而被破坏,即在每一代中保留上一代产生的最优个体。设到第t代时,群体中A(t)为最优个体。经过轮盘赌选择、交叉和变异操作后,生成了第t+1代群体。在第t+1代群体中,将排序最后的个体替换成为上一代的最优个体A(t)。这样,既保持群体的规模不变,又能将进化过程中生成的最优个体一直保留。
3 仿真实验
3.1 算法有效性试验
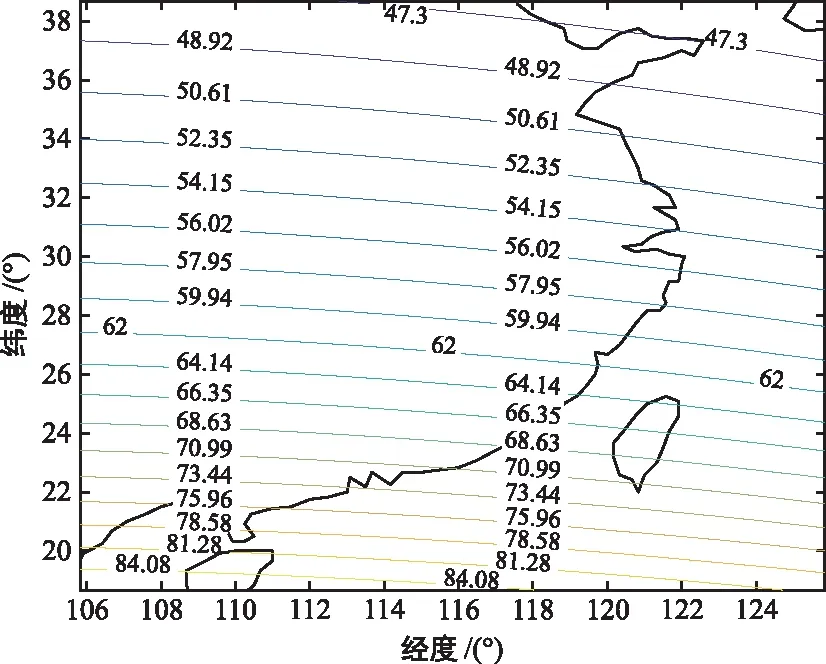
在实际的卫星干扰源定位中,往往需要定位某个区域的目标。因此,在仿真试验设计中,定位区域划分为某个区域。设目标区域中心位置为115.84°E,28.67°N,经纬度所需覆盖范围各为20°。3颗卫星轨道的中心位置分别为85.5°,110.0°,125.0°,卫星轨道窗口分别为5°,10°,7°。遗传算法个体的基因总数为17,交叉概率为0.4,变异概率为0.2,代数为100。表1给出了卫星轨位随遗传代数的变化情况,可以发现,当世代数为50时即达到了收敛,此时卫星轨位为83.09°,105.02°,128.50°,平均误差为41.39 km。图3(a)给出了随着遗传代数,平均定位误差的变化情况,图3(b)给出了优化轨位后的GDOP图。图3(c)给出了常用构型1(85.5°,110.0°,125.0°)的GDOP图,图3(d)给出了常用构型2(83°,110.0°,128.5°)的GDOP图,可以发现,所提方法能够获得优于其他常用定位构型的定位误差结果。

表1 卫星定位轨位随遗传算法世代数变化Tab.1 Variation of the satellite orbital position with genetic algorithm generation
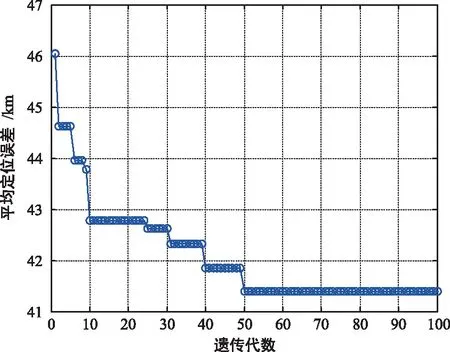
(a) 定位误差随遗传代数变化情况

(b) 所提方法定位误差分布情况
(c) 常用构型1定位误差分布

(d) 常用构型2定位误差分布
3.2 实星星历仿真验证
设目标区域中心位置为108.94°E,34.33°N,3颗卫星轨道范围为85°~135°。遗传算法个体的基因总数为17,交叉概率为0.4,变异概率为0.2,代数为100。表2给出了卫星定位构型随遗传代数的变化情况,可以发现,当世代数为60时即达到了收敛,此时卫星定位轨位为85.41°,110.37°,134.75°,平均误差为29.52 km。图4(a)给出区域平均GDOP误差随遗传代数的变化情况,图4(b)给出了优化轨位后的GDOP图。图5给出了实星构型的仿真情况。根据遗传算法的轨位设计结果,主星选择轨位87.5°的CHINASAT 12,邻星一选择轨位132°的VINASAT-1,邻星三则在主星和邻星一中间依次选择了10颗不同轨位的卫星。卫星两行星历日期为2020年4月16日,基于SGP4算法生成卫星星历。通过图5可以发现,卫星轨位约为110°时能够获得最优的GDOP值,这与遗传算法的搜索结果一致。

表2 实星定位轨位随遗传算法世代数变化Tab.2 Variation of the real satellite orbital position with genetic algorithm generation

(a) 定位误差随遗传代数变化情况

(b) 定位误差分布情况图4 实星定位构型优化结果Fig.4 Location error results of the optimization for real satellites

图5 定位误差随邻星三经度的变换情况Fig.5 Variation of location error with the longitude of adjacent satellite 3
4 结束语
卫星定位精度与定位构型有直接联系,而在轨的卫星受到燃料、动力等因素的制约,几乎难以大幅调整位置。因此,提前进行卫星定位的轨道优选尤为重要。鉴于传统构型设计方法的计算量巨大,本文基于智能类算法中的遗传算法,探索了基于遗传算法的卫星定位构型设计方法。仿真实验表明本文方法对单目标、区域目标等定位场景均能够收敛到最优的定位构型,并结合实星星历,验证了所提方法能够对实际工程应用提供重要参考。