基于三维激光扫描的铁路限界检测技术
2022-05-19杨楠
杨楠
(中国铁路兰州局集团有限公司 科技和信息化部,甘肃 兰州 730000)
0 引言
铁路限界检测对保证铁路安全运营起着重要作用。特别是近年来我国铁路持续发展,对运营安全保障措施提出了更高要求。随着列车速度的提高和列车运行班次的增加,可以上道开展限界检测的时间越来越少,而且往往安排在夜晚等不方便实施精确量测的时段,增加了检测难度,也可能导致检测精度降低,传统限界检测手段的局限性更加突出。因此,三维激光扫描技术成为铁路限界检测的首选。
近年来三维激光扫描技术在土木工程领域中的应用越来越广泛,国内外的学者也开展了相关研究。文献[1—2]以实际工程案例为依托,研究三维激光扫描在地铁限界测量中的应用。文献[3]提出一种铁路岔心测量自动提取方法,并实例验证了三维激光扫描技术提取岔心坐标与传统测量方式差值不大。文献[4—6]对三维激光扫描技术在滑坡地表变形、铁路现场施工与运营、文物空间信息监控等方面进行研究。文献[7—11]基于三维激光扫描技术,研究隧道限界检测技术。文献[12—13]论述了三维激光扫描技术在地质勘察中,获取危岩体结构面产状信息的具体方法。文献[14]研发了采用三维扫描模式的铁路线路障碍监测报警系统。上述研究主要集中在三维激光扫描的点云处理、断面变形等方面,在隧道限界检测方面仅重点研究了隧道限界的总体轮廓,并未结合铁路线路的中心展开详细研究。在此,结合铁路限界检测的具体情况,开展基于三维激光扫描的铁路限界检测技术研究。
1 三维激光扫描的外业工作
1.1 扫描任务及目的
利用三维激光扫描仪对铁路线路及线路中心两侧一定范围内的地物地貌进行测量,并按照铁路限界的有关规定,确定铁路限界是否满足规范要求。
1.2 扫描方案
1.2.1 扫描盲区分析
利用三维激光扫描仪进行线路扫描时,在仪器下方会出现扫描盲区,导致点云效果图出现空洞,即“灯下黑”现象(见图1)。一般情况下,扫描仪架设越高,其下方空洞的直径会越大。在此,采用中海达HS1200激光扫描仪,其外形尺寸为φ188 mm×318 mm,扫描盲区直径D与仪器架设高度H的关系见图2,两者之间的关系可根据式(1)计算:
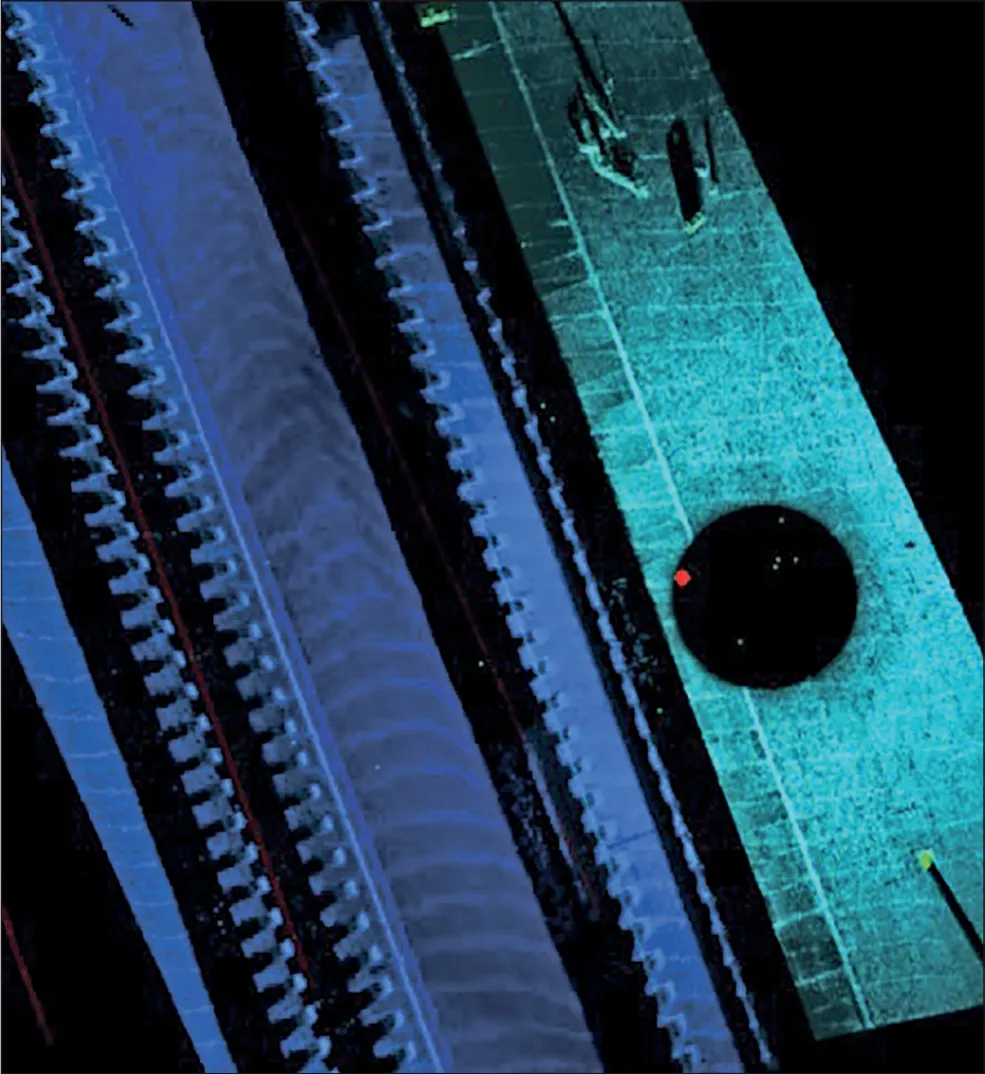
图1 扫描盲区
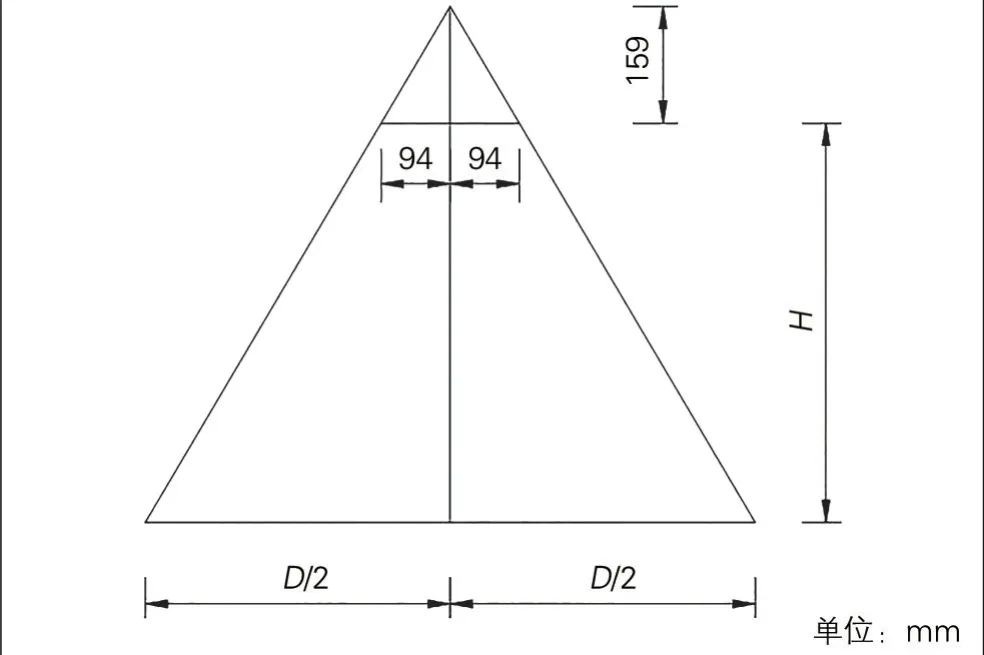
图2 扫描盲区示意图

采用三维激光扫描仪进行扫描时,由于受限于物体的空间形状、分布等,一次置镜均有扫描不到的地方,因此必须选择适宜的扫描方法及设站方式,以使扫描数据拼接完整。在设站时,应保证各站的盲区处在邻近站的扫描范围内,且邻近站的扫描数据能将该站盲区部位的数据补充完整。铁路线路为大型带状物,宽度较小,但长度很长,因此设计一种有效的线路扫描方法尤为必要。
1.2.2 线路设站方式
通过对各种设站形式的优劣进行对比分析,决定采用沿铁路两边路肩进行折线形设站的方式(见图3)。该方法最大的优点是可在铁路两边交叉扫描,从而使扫描得到的数据拼接后不会出现盲区。但该方法也有一定缺点,主要是将扫描仪从线路一侧换站到另一侧较为麻烦。
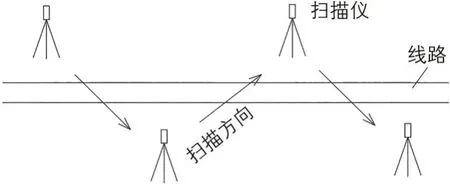
图3 沿铁路两边路肩折线形设站示意图
为解决上述问题,在扫描过程中,可先在线路一侧按预先选好的扫描仪架设点连续进行扫描,然后再到线路另一侧的扫描仪架设点连续进行扫描(见图4),不但提高了扫描速度,也减少了频繁穿越铁路的不便。

图4 沿铁路两边路肩连续设站示意图
2 铁路线路中心的确定
铁路线路中心的确定是进行铁路限界超限判定的最重要依据。铁路限界的判定是以线路中心所对应的轨面标高作为基点,因此必须首先确定铁路线路的中心线。
2.1 铁路线状区域的分割
三维扫描得到的数据不仅包括铁路区域数据,还包括线路周边一定范围内的地形地物等信息,后者称为冗余数据,进行数据处理时采用人机交互的方式将其去掉。将保留下来的数据结合相关的高程信息进行处理,只保留含有钢轨的下部结构。研究中选取高度为−2~0.2 m 的点云,因为采用三维扫描仪进行扫描时,一般取扫描仪横轴的高度为0.0 m,而扫描仪横轴距地面高度约为1.4~1.6 m,可以只保留含有钢轨的近地面点云。初步筛选后的铁路区域下部结构点云分布见图5。
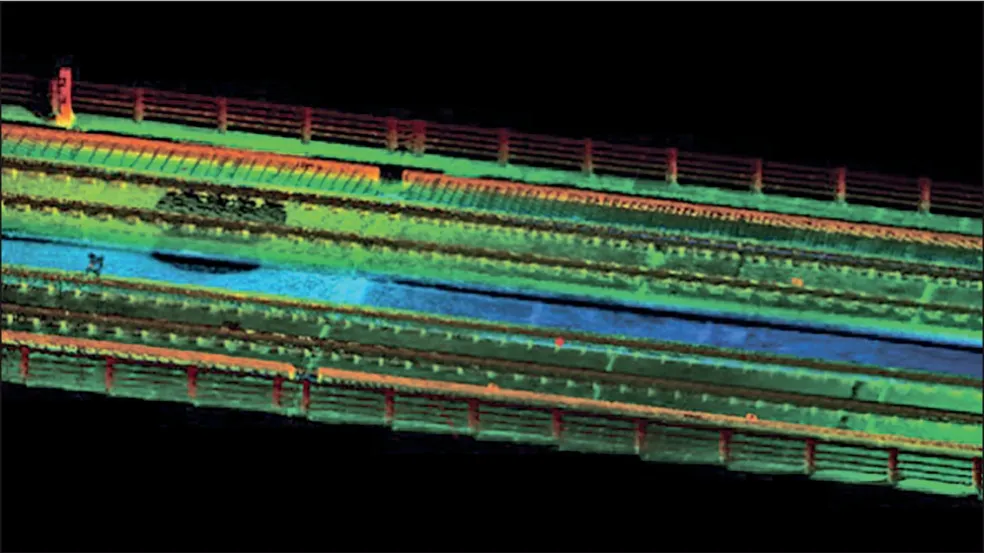
图5 初步筛选后的铁路区域下部结构点云分布
2.2 钢轨所在区域的选定
地面三维激光系统获得的目标对象点云数据在空间分布上是散乱的,制约着点云数据的研究与应用,因此,需要建立索引来支持点云数据的研究。在数据处理中,根据数据结构和点云数据的特点,利用平面格网建立点云数据与空间格网之间的关系,使点云数据规则化排列。
在格网化过程中,格网大小要适中,不宜过大或过小,否则都会影响到点云数据的处理。格网化点云见图6,假设整个工程区域内最大最小坐标值为Xmin、Xmax、Ymin、Ymax,将工程的整个区域投影到XOY平面内,划分为U×V的格网,格网间距分别为Xgrid、Ygrid,则有:
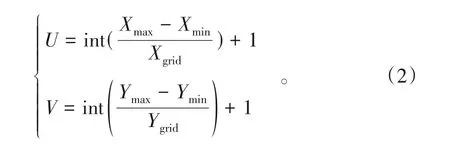
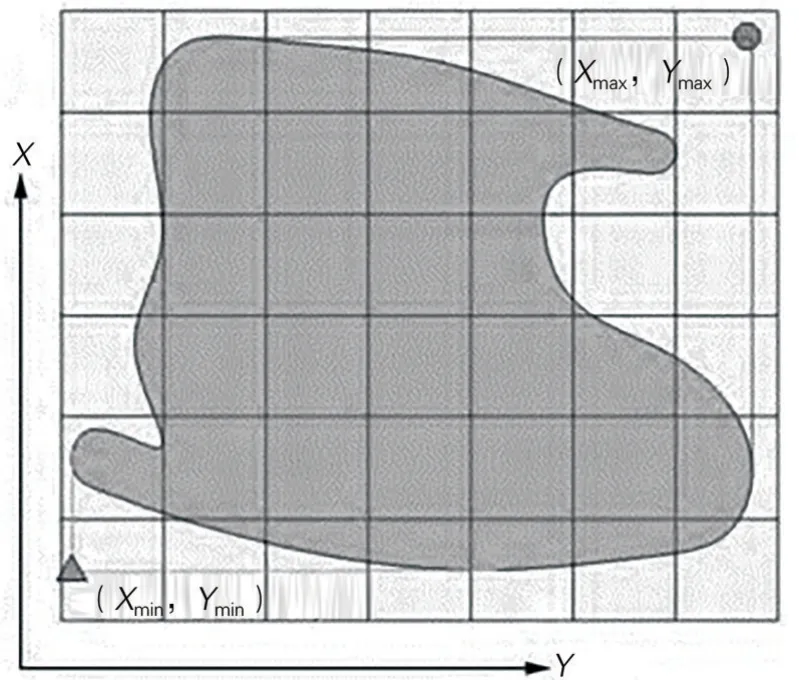
图6 格网化点云
通过对每个格网内的点集作高程统计分析,可以得到高程的极差特征值,其公式如下:

式中:ΔZ为格网内最高点与最低点之间的高差;Zmax为格网内最高点的高度值;Zmin为格网内最低点的高度值。
结合钢轨及其附近的高差特点,利用高程极差特征值ΔZ对各格网进行筛选,取格网内高程极差特征值在[3H/4,5H/4]范围的点作为输出的钢轨区域所在格网点云,其中,H为钢轨头部到钢轨底部之间的距离。后续只需要对含有钢轨点云数据的格网进行处理,其余可以删除,处理结果见图7。上述方法可自动快速锁定钢轨潜在区域,为后续轨顶面点精细识别提供区域位置参考,减少精细识别处理数据量。
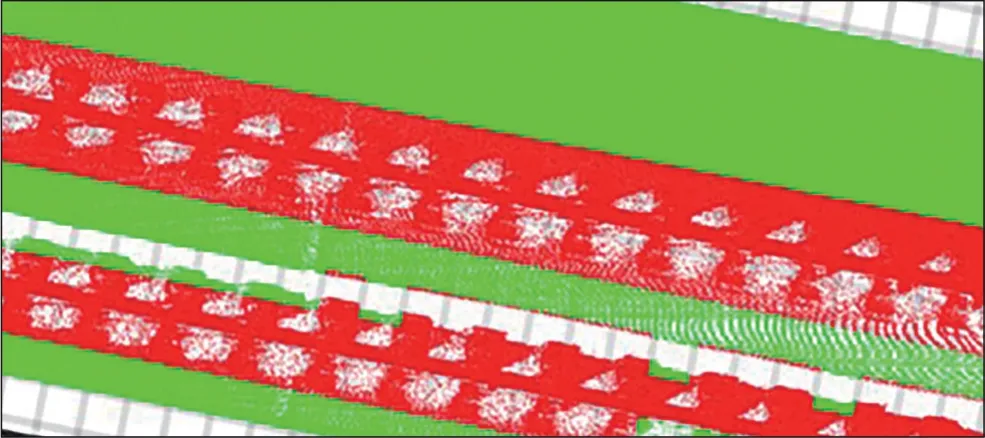
图7 潜在含有钢轨的格网点云
2.3 钢轨顶面的选择
对于保留下来的点云,结合钢轨横断面尺寸,必须满足以下条件:
(1)在轨面点的附近必须有比它低0.03~0.25 m的点。
(2)在其附近不能有比它高0.03~0.05 m的点。
按上述2项为约束条件遍历完所有点,即可得到轨面点云(见图8、图9)。
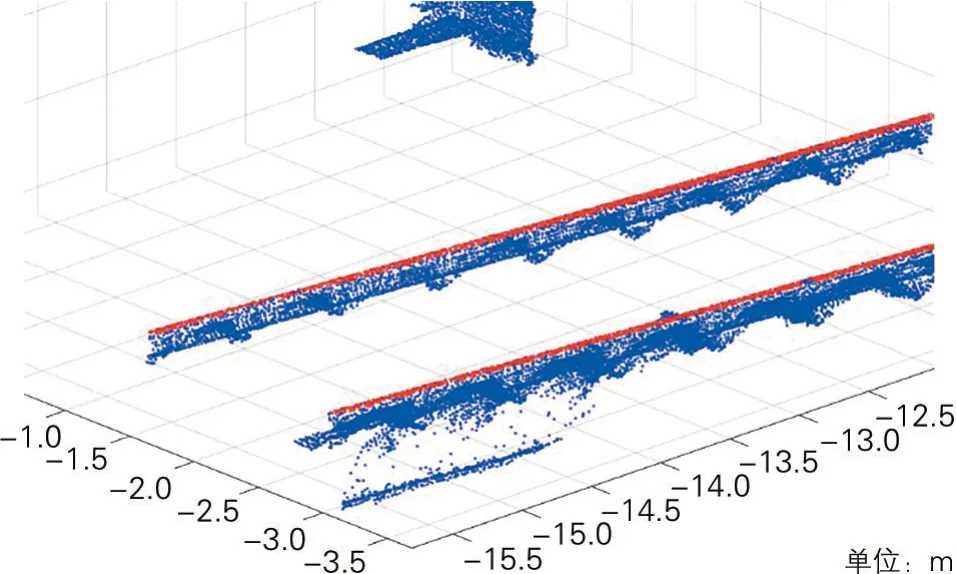
图8 提取后的轨面点云立体图

图9 提取后的轨面点云横断面图
2.4 选取轨道中点拟合曲线
为方便线路拟合,需要把左右轨顶点数据区分开,在此采取区域生长的算法来区分左右轨顶点数据。区域生长法的基本思想是:考虑激光点与其空间邻域点之间的关系,将具有相似性质的点集合起来构成区域。首先将任意一点作为生长的起点,对点与点之间的距离设置阈值,点邻域内高差设定阈值。遍历所有点,在阈值范围内的点合并到种子点所在区域中,将这些新的点作为新的种子点进行以上步骤,直到再没有满足条件的点被提取进来,此时一个具有某种性质或条件的区域集合就长成了。同时考虑到提取后的点云中含有少量噪点,统计每个集合类的点数,若点数少于某一限值,则该类点应为噪点,将该集合类的所有点剔除。区域生长法流程见图10。对每个含有钢轨的单元格进行上述步骤处理,最终合成整个铁路区域内左右轨顶点分类数据(见图11)。
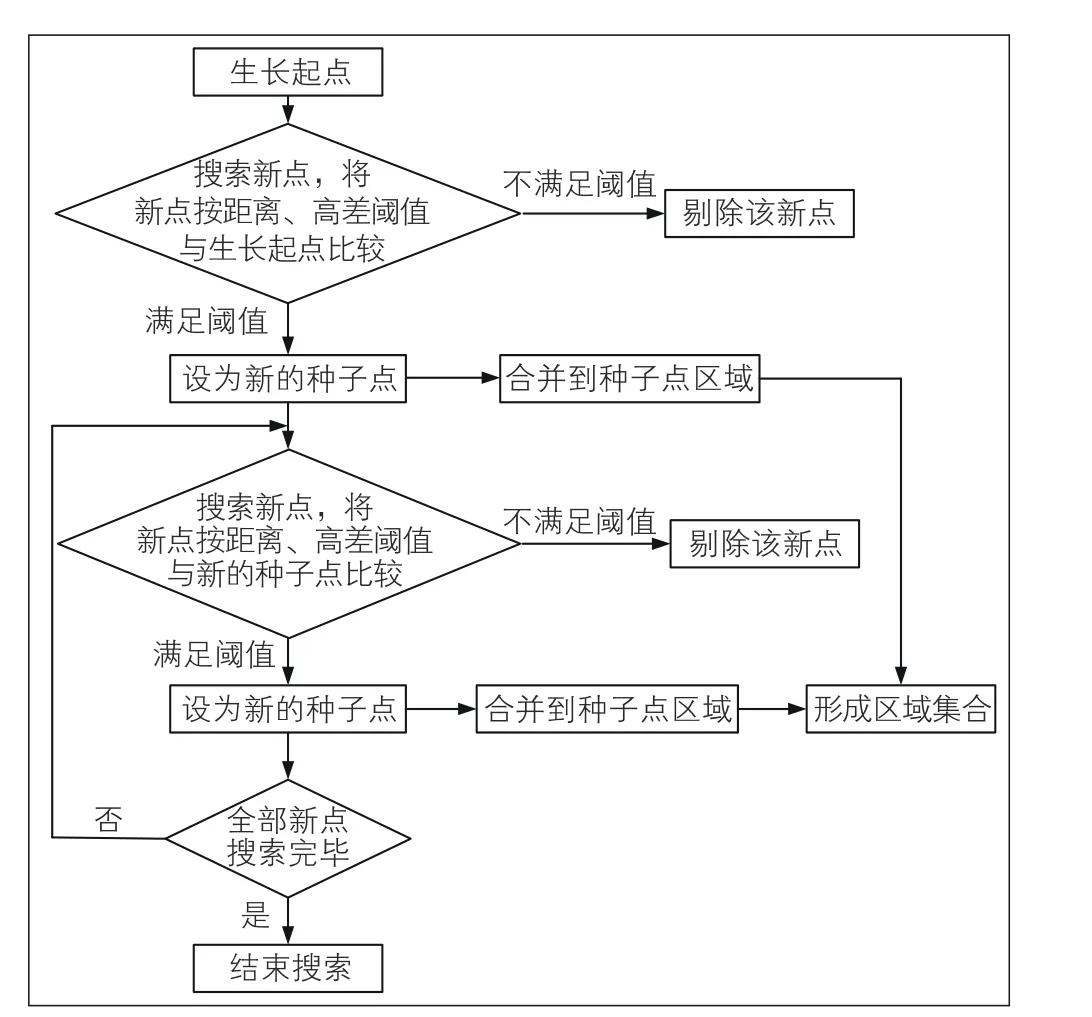
图10 区域生长法流程

图11 左右轨顶点
根据拟合结果,利用几何原理求取线路中线。左轨面点集中的每个点(xi1、yi1)都能在右轨面点集中寻找到与其对应的距离最近的一点(xi2、yi2),它们构成1 对轨面点。计算每对轨面点的中点(xi、yi),计算公式如下:

根据一系列中点坐标对线路中线进行二次曲线拟合,即可拟合成2 条轨道的中线(见图12),该线不仅位于2 条钢轨的中间,其高程也是相邻轨面高程的平均值。
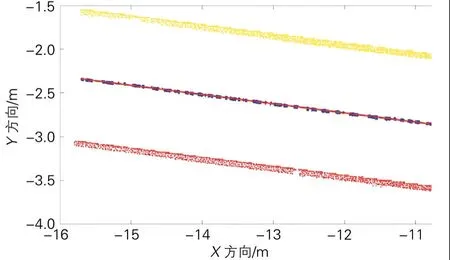
图12 轨道中线点拟合
3 超限判定依据及判定效果
3.1 限界组合圆柱(台)体确定
铁路限界的限界值要求采用中国铁道出版社2018年版的《铁路技术管理规程》(高速铁路部分)“条文说明”和《铁路技术管理规程》(普速铁路部分)“条文说明”中的规定值。在进行铁路线路限界是否超限判断时,要根据规程要求取不同里程的线路横断面进行限界判断,选取的横断面应与线路的纵轴线相垂直。线路横断面数据是和钢轨数据同时采集的,是同一次三维激光扫描设备采集的不同区域数据。在铁路线路中,随着里程增加,线路纵轴线的方向不断变化,从而导致横断面的方向也不断变化,给限界判定时精准确定横断面的方向带来了较多困难。同时,若仅根据里程取限界的判定断面,在靠近断面附近若有个别超限点则往往取不上。因此,在进行各里程的断面限界超限判断时,采取以限界组合圆柱(台)体代替断面的方式,该组合圆柱(台)体就是将铁路限界平面图绕其竖轴旋转1周得到的立体图形(见图13)。
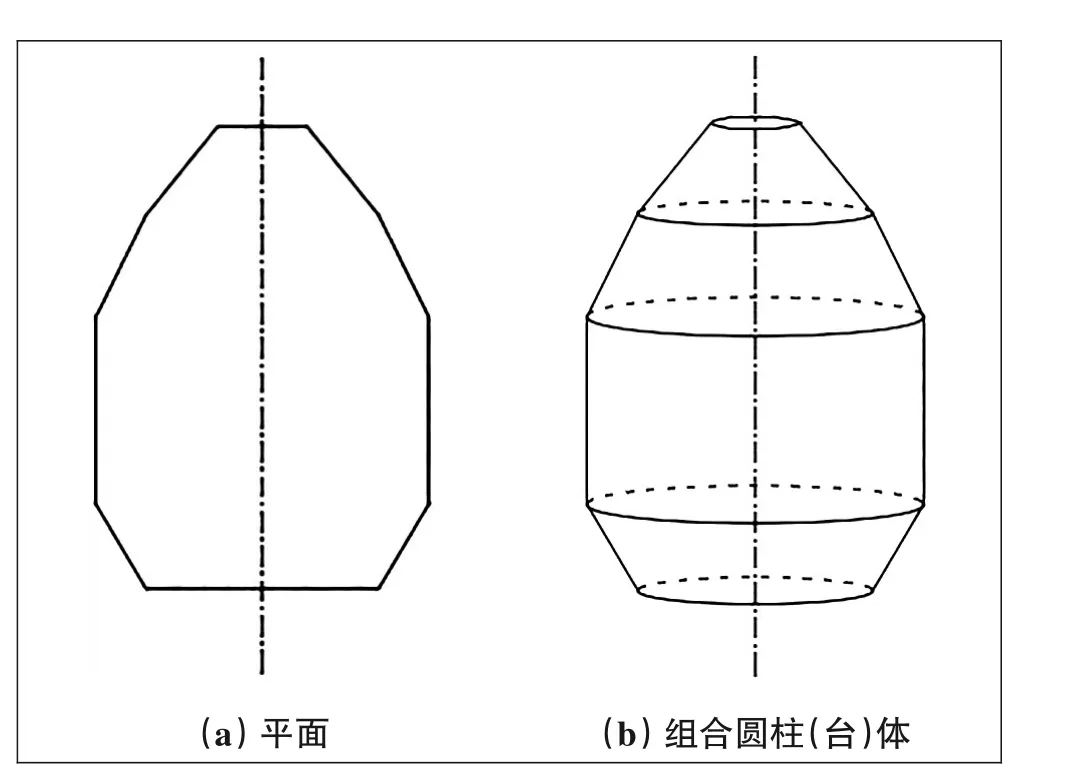
图13 限界平面及组合圆柱(台)体示意图
3.2 超限判断步骤
圆柱(台)竖轴对应的中线里程即为需要进行限界超限判定横断面的里程。对该里程的限界进行超限判断时,采取以下的步骤:
(1)将线路里程增大方向定为X方向(不必特别精确)。
(2)与X方向垂直的平面方向定为Y方向,向右为正。
(3)Z方向为竖直方向,向上为正(圆柱(台)坐标系见图14)。
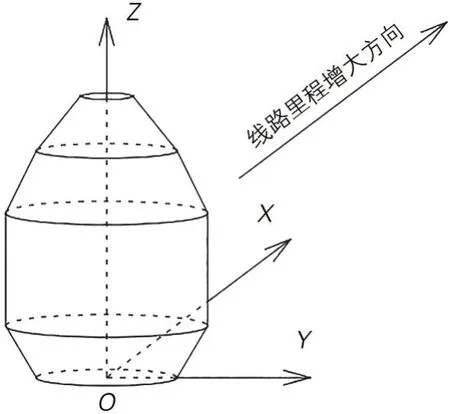
图14 圆柱(台)坐标系
(4) 将该断面里程上轨道中线点的坐标转化为(0,0,0)。
(5)将其他点的坐标按这一坐标系进行转化。需要转换的扫描点所覆盖区域的范围可限定在一圆柱体内,该圆柱体竖轴中心即为该断面里程中心点,圆柱体的半径为限界组合圆柱(台)体的最大半径加上0.2 m,高度为限界圆柱(台)体的高度加上0.2 m。
(6)超限判定。将转换的点位坐标带入以限界组合圆柱(台)体为依据编制的判定方程中,若有的点在限界范围内,说明该里程有超限点。然后再进一步对该点进行判断,确定是移动目标还是非移动目标,最后确定是否存在超限。
对于直线上的限界,由于线路左右侧的限界值相同,因此组合圆柱(台)体的俯视图为一圆形(见图15)。而对于曲线上的限界,由于存在一侧限界的加宽,对于曲线的内外侧采用不同的限界值。因此,内外侧限界圆的取值不同,俯视图则相当于2个不同直径的半圆组合在一起(见图16)。在此情况下,确定点位坐标转化的区域范围时,需要根据线路的左偏和右偏,采用不同的半圆柱(台)体,进行限界判断时,依据Y轴的正负值,同样选择不同的限界判定方程,形成2个不同直径半圆结合的情况。
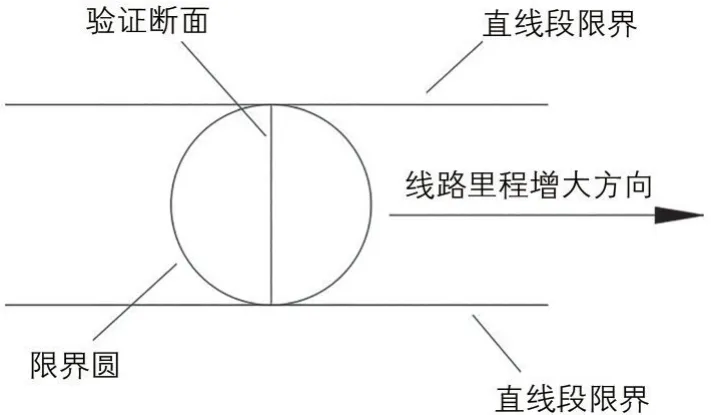
图15 直线段限界判定平面示意图
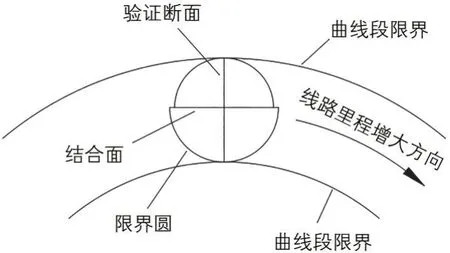
图16 曲线段限界判定示意图
3.3 限界超限判定效果
选择客运专线、客货共线铁路不同行车速度条件下的区段进行三维激光扫描效果测试。首先将钢轨区域的扫描数据进行处理,拟合出轨道中线;其次,选择本区段内具有代表性的线路横断面,并将该横断面上的轨道中线点数据和其他扫描数据均转化为圆柱(台)坐标系中的坐标值,而且轨道中线点的坐标转化为(0,0,0)。然后,通过上述限界超限判定方法对是否有超限点进行判断。现场测试时专门在铁路限界内放置了目标,并将采用全站仪、钢尺等传统测量方法与该方法测定的结果进行对比。对比结果表明,2种方法测得的数据差值不大于5 mm,满足限界测量对精度的要求,因此该限界超限判定方法可以精确地判定铁路限界的超限情况。
4 结束语
结合现阶段铁路限界检测的具体情况,将三维激光扫描技术应用到铁路限界检测中,重点论述采用三维激光扫描进行铁路限界检测外业工作的操作程序,以及依据扫描数据确定铁路线路中心和超限判断的方法和步骤。经现场验证可知,该技术满足限界测量对精度的要求,可进一步保证铁路运营安全。
