带行走轴的机器人离线程序与校准方法
2022-05-19王亭力魏国兴吴政勋刘久月徐海博潘彤
王亭力 魏国兴 吴政勋 刘久月 徐海博 潘彤
(一汽模具制造有限公司,长春 130013)
1 前言
随着汽车工业市场竞争的与日俱增,对焊装线的制造周期、人工成本都提出了更高的要求。带行走轴的机器人在焊装线内的应用已经十分普遍,但是现场调试带行走轴的机器人的调试时间却不短,这是由于2 方面原因导致的,一是现场经常因行走轴的Home(初始)原点与机器人的Home原点不同导致机器人无法移动,或行走轴的行走方向与机器人自身定义的运动方向相反导致机器人的运动反向等;二是离线程序的运动轨迹误差过大导致离线程序无法应用,应用高精度的离线程序能够有效的提高调试周期。
本文应用Tecnomatix 软件的离线编程技术,搭建行走轴的机器人涂胶系统的模型,导出离线程序并基于六点法对其进行精度校准。
2 离线编程技术
2.1 搭建虚拟数模
Tecnomatix 是1 套数字化设计软件,包含Pro⁃cess Designer(PD)、Process Simulate(PS)模 块,其 中PD 应用于焊装生产线的工艺规划、分析与优化,PS 应用于机器人及其他生产设备的模拟仿真与离线编程等。
在PS 中搭建带行走轴的机器人系统数模需要根据工艺布局,将资源数据移动到相对应的位置,其中抓手需要被当做机器人的工具而附在机器人上,如图1 所示。

图1 虚拟数模
2.2 行走轴的定义
在PS 中定义资源运动机构的工具是Kinemat⁃ics Editor,定义行走轴首先需要将移动部分移至零点标尺准确对应的位置,然后建立2 个重要的坐标Toolframe 和Baseframe,Toolfram 位于机器人安装面的中心,Z轴正向指向机器人,X轴正向为机器人行走的前进方向;Baseframe 位于行走轴地脚板的下表面,Z轴与第1 个坐标的Z轴同轴,且X轴、Y轴、Z轴的方向与Toolfram 相同;创建行走轴机构,行走方向为负方向,如图2 所示。
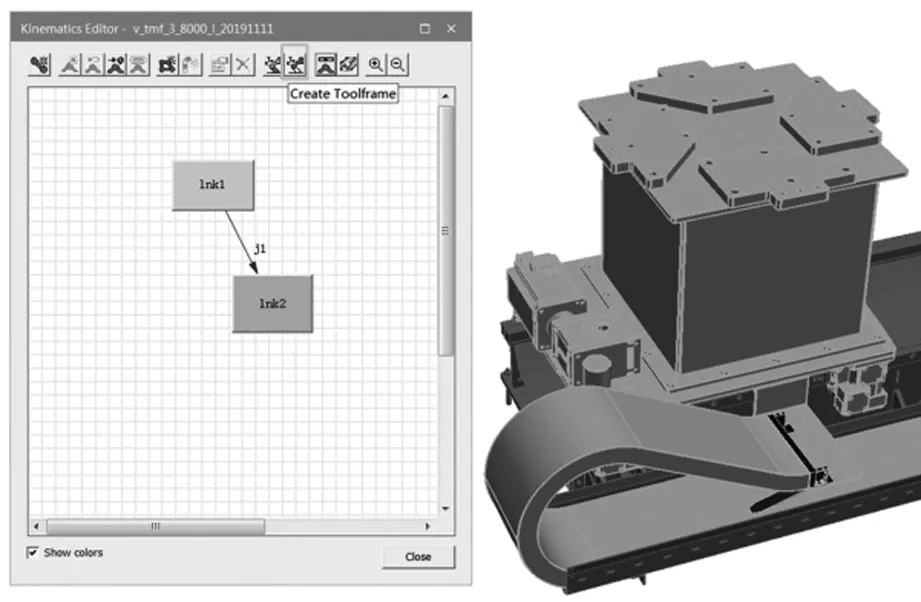
图2 定义行走轴
2.3 仿真路径
在PS 中设置运动轨迹需要使用Path Editor,在此工具框中可以设置路径点的速度、加速度等参数,如图3 所示。

图3 设置轨迹点参数
在固定涂胶机器人系统中,过渡点的运动类型为点到点,涂胶工艺点类型为直线;除了首尾点及特殊的点的加速度,其他点都尽量都设为100%,这个可以在现场根据需要进行更改;速度值若为点到点类型,则速度的单位为%;若为直线类型,则速度的单位为mm/s;逼近值是指机器人运行到此点的精确度,0%为最准确,100%为最大误差。轨迹首尾点及工艺特征点需准确到达的点,逼近值必须设为0%,其他辅助点尽量设为100%,能够提高机器人运行速度,减少轨迹时间,提高节拍。
2.4 KUKA机器人虚拟控制器
Tecnomatix 输出离线程序需要2 个主要模块,一个是PS 仿真软件中的OLP_TOOL 程序文件,另一个是KUKA 机器人厂家提供的RCS 虚拟控制器文件。在KUKA_VKRC 和OLP_TOOL 安装完成后,在PS 中设置机器人属性,图4 为控制器中每项参数的含义。
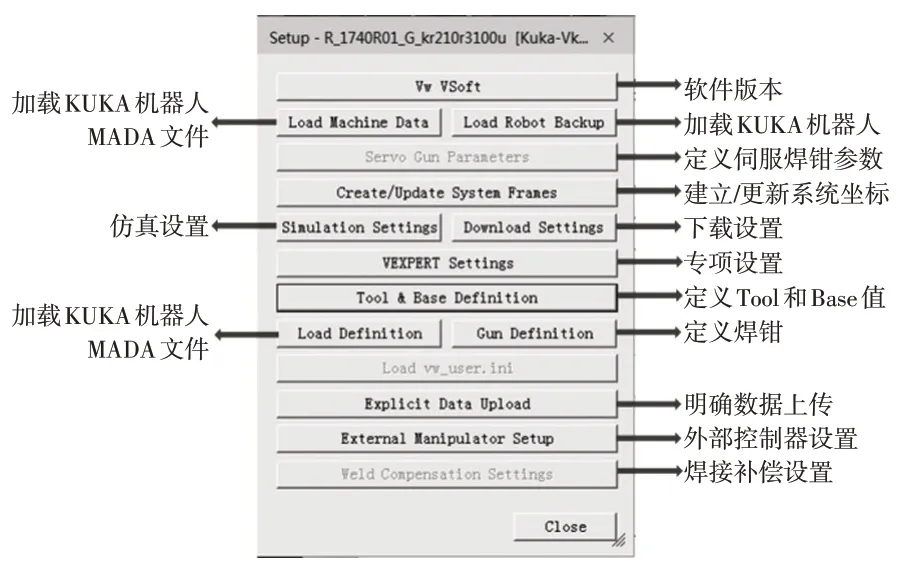
图4 机器人参数设置
2.4.1 控制器版本
基于KUKA_C4 机器人选择对应的控制器Con⁃troller 为Kuka-Vkrc,Rcs version 选 择krc8.2_r01,Vkrc4 的机器人在Vw Vsoft 中选择Major version_8.2。
2.4.2 KUKA 机器的MADA 文件
加载机器人的Machine Date 需要根据机器人型号选择对应的MADA 文件,行走轴机器人与固定机器人设置离线参数最大的区别在于机器人需要设置1 个外部轴,并且需要定义外部轴的行走方向以及机器人和行走轴的相对位置关系,所以需要处理KUKA 自带的MADA 文件中的machine.dat文件。
首先修改其中的电机参数RAT_MOT_AX,核对$RAT_MOT_AX[7]参数是否等于{N-35526926,D 1000000};然后修改机器人相对于7 轴(即行走轴)的安装位置及方向:在仿真中将机器人和行走轴都归到0 位,然后俯视视图,根据机器人朝向、7轴拖链方向、7 轴移动的正负方向选择相对应的安装位置及方向参数参照表,例如机器人与7 轴的安装方式如图5 所示。

图5 7轴设置
选择相对应的安装位置及方向参数参照表,如图6 所示,更改machine.dat 文件中的ET1_TA1KR 和ET1_TFLA3 参数。

图6 安装位置及方向参数参照表
其中ABC指的是机器人相对于7 轴的朝向。Z指的是机器人底座相对于7 轴地脚的下表面的高度,根据7 轴品牌的不同和7 轴与机器人之间是否额外有机器人底座会发生变化。最后需要修改行走轴的行程参数,其中$SOFTP_END 的值即为行走轴的有效行程。
2.4.3 设置Tool 值与Base 值
根据机器人携带的工具不同,定义的Tool 值和Base 值也不同。针对机器人抓持工具,Tool 值与Base 值的种类需保持一致,均为Kopf;针对固定工具,Tool 值与Base 值的种类需保持一致,均为Basis;机器人抓持工具的Tool 值应为工具中心点(Tool Centre Point,TCP)坐标,Base 值应为车系坐标;固定工具的Tool 值为车系坐标,Base 值为外部工具的TCP 坐标。
针对带行走轴的搬运机器人所应用的是抓手的TCP 为Tool 值,固定涂胶枪和固定焊枪的TCP 为Base 值,种类都选为Basis。
2.4.4 离线程序下载
在PS 中下载离线程序需要将路径添加到Path Editor 中,然后通过Download to Robot 下载程序,如图7 所示。

图7 机器人离线输出
KUKA 机器人1 条路径会输出5 个文件,如图8所示,其中.dat 文件记录的是路径中点的位置和方向以及机器人6 轴的姿态;.log 文件是记录状态的文本;.olp 文件记录的是Tool Data 和Base Data;.us⁃er 文件里是路径中每个点的离线程序;.src 文件是路径点的所有信息。

图8 KUKA机器人离线文件
3 离线校准
PS 中导出的离线程序应用到现场机器人中常常存在很大的偏移,精准度很差,需要大量时间反复校正。影响误差的因素主要有2 个方面,一是加工误差,主要包括夹具、焊钳、抓手等工具的制造误差;二是安装误差,主要来源是机器人与夹具相对位置造成的误差。一般来说加工制造误差对离线程序的精准度影响较小,可以忽略不计,因此在实际工作中主要针对安装误差进行校准。
3.1 校准工具TCP
TCP 的计算与法兰坐标系相关,TCP 标定有XYZ-4 点法和XYZ参考法。
XYZ-4 点法即将待测量工具的TCP 从4 个不同方向移向一个参照点,参照点可以任意选择。机器人控制系统从不同的法兰位置值中计算出TCP。XYZ参考法即对1 件新工具与1 件已测量过的工具进行比较测量,机器人控制系统比较法兰位置,并对新工具的TCP 进行计算。
3.2 基坐标的设定
基座标一般为工装的车身坐标系,测量基坐标的方法一般为3 点法,首先定义原点,工具的TCP 点需要移到基座标系的原点位置。
然后定义X轴正方向,参考工具的TCP 点需移到基座坐标系X轴正方向上的某个位置。
定义Y轴的正方向(XY平面),工具的TCP 点需移到基座坐标系上XOY 平面中Y轴值>0 的某个位置。
使用三点方法可以明确的定义所需基座坐标系,如图9 所示。

图9 定义基座标
3.3 校准离线
由于误差的存在,离线程序需要经过校正后才能使用。误差的来源主要有2 类,一是外部误差,包括机器人和夹具的安装误差、夹具的加工误差等;二是机器人的内部误差,即机器人本体在加工制造时的产生的误差[1],机器人内部误差属亚毫米级,可以忽略不计。因此需要校正的主要是外部误差[2]。
带行走轴的机器人现场调试阶段经常发生离线报错的情况,耗费时间和人力调试程序,Tec⁃nomatix 软件采用多点拟合校准法,在PS 虚拟环境中标记至少3 个以上特征点,然后在生产现场示教这些特征点,最后导入PS 中,利用Calibration 命令(图10)校准机器人的位置误差,校准完成之后,导出校准之后的离线程序可直接应用到现场调试中。
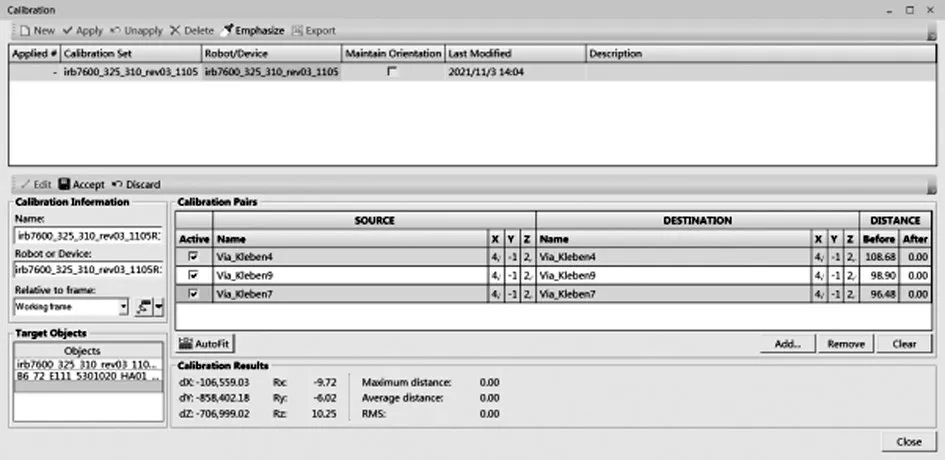
图10 虚拟多点拟合校准
4 结论
在汽车焊装生产中,应用Tecnomatix 软件对带行走轴的机器人进行虚拟建模与仿真,然后输出离线程序,并对离线程序进行校准,校准后的离线程序可直接应用到生产现场调试中。结果表明,应用Tecnomatix 软件进行机器人的离线编程和校准可以缩短现场机器人调试时间,提升现场工作效率,可以直观的观察机器人的干涉区,提前规划好复杂轨迹,方便机器人路径的优化与修改。