基于双并联平台的港口船舶智能系泊方法研究
2022-05-18唐友刚赵铁石丁实兴胡传琦
高 峰,唐友刚,赵铁石,胡 克,,丁实兴,胡传琦
(1.天津大学 建筑工程学院,天津 300072;2.交通运输部天津水运工程科学研究所 港口水工建筑技术国家工程研究中心,天津 300456;3.燕山大学 机械电子工程系,秦皇岛 066044 )
随着信息化、新材质、新能源与人工智能技术的快速发展,作为水运行业中最关键的船舶与港口基础设施自动化程度越来越高,但是作为连接船岸间系泊作业方式却一直未有根本性改变[1-3]。全球航运业的高速发展带来的船舶大型化趋势,频繁的系靠泊作业对装卸效率的提升需求也越来越迫切,同时伴随的安全风险和提升保障能力等问题已成为航运行业中关注的重点。船舶停泊期间,受水文气象条件、装卸作业导致船舶吃水频繁变化等因素影响,必须不断调整缆绳长度,以保证船舶泊稳条件,不仅增大了船员劳动强度,而且存在事故风险。现代科技不断进步,使得实时监控、自主调整的新型智能化、无人化港口装卸作业已成为现实,而利用高新技术保证船舶系泊期间的作业安全以代替多年来的传统带缆方式也已经成为可能,如瑞士Cavotec 公司研发的Moor Master系统、瑞典Trelleborg公司的AutoMoor系统以及荷兰Mampaey公司Dock Locking系统等均是已投入应用的自动系泊作业解决方案[4-5](见图1),这类吸盘式系统在对系泊作业中的船舶稳定可取得较好效果[6]。同时,从未来港口发展来看,实现智能化的自动系泊系统有安全、高效、经济、环保的特点,作为智慧型港口的重要组成部分,自动化系泊设施日益得到重视,需求迫切程度也在逐渐增加,其代替传统缆绳布置下的船舶系泊作业将是必然趋势。

图1 欧洲自动化系泊装置典型产品与应用Fig.1 Typical products and applications of European automatic mooring devices
本文基于船舶水动力学及机构运动学控制理论,提出一种基于双并联平台构建的可调节船舶运动量的码头智能化自动系泊方案,以期实现可在风浪流及潮位变化环境下自主调整船舶的动态系泊控制,研究依托功能样机在波浪水池开展了船模测试以验证方案可行性,通过降低船舶运动量来改善码头泊稳条件优化系泊作业环境。
1 基于双并联平台的系泊方式
1.1 双并联构型
港口船舶系泊系统需要满足六自由度运动的要求,又需要具有良好的抗冲击性能与较高的刚度特性,因此借鉴并联机器人领域中可以实现六自由度运动的经典Stewart构型及其衍生机构的特点,结合满足船舶系泊的基本要求,采用双并联构形,即6驱动、3助力的结构型式(简称 6UPS/3UPS)。双并联机构由6个驱动分支和12个助力分支以及上下平台构成。分支与下平台通过虎克铰连接,与上平台通过球铰连接,驱动分支的移动副作为驱动副,辅助分支的移动副充当辅助助力。并联机构# 1的驱动分支在圆周上均匀分布,并联机构#2的驱动分支交叉布置,这样可以保证双并联机构在初始位置不发生奇异。双并联系泊机构在工作时主要分为单并联单元独立控制阶段(即与船模接触前以及和船模脱离后)和双并联单元同步控制阶段(即双并联单元均与船模吸附)。双并联系泊机构的两个下平台均与岸边固定,可以将其视为一个大平面与岸边固连。当两个并联单元的上平台均与船模侧舷接触时,两个上平台共面,可以将其也等效为一个大平面,这个大平面与船身接触。双并联机构简图和其构成的系泊系统等效模型如图2所示。
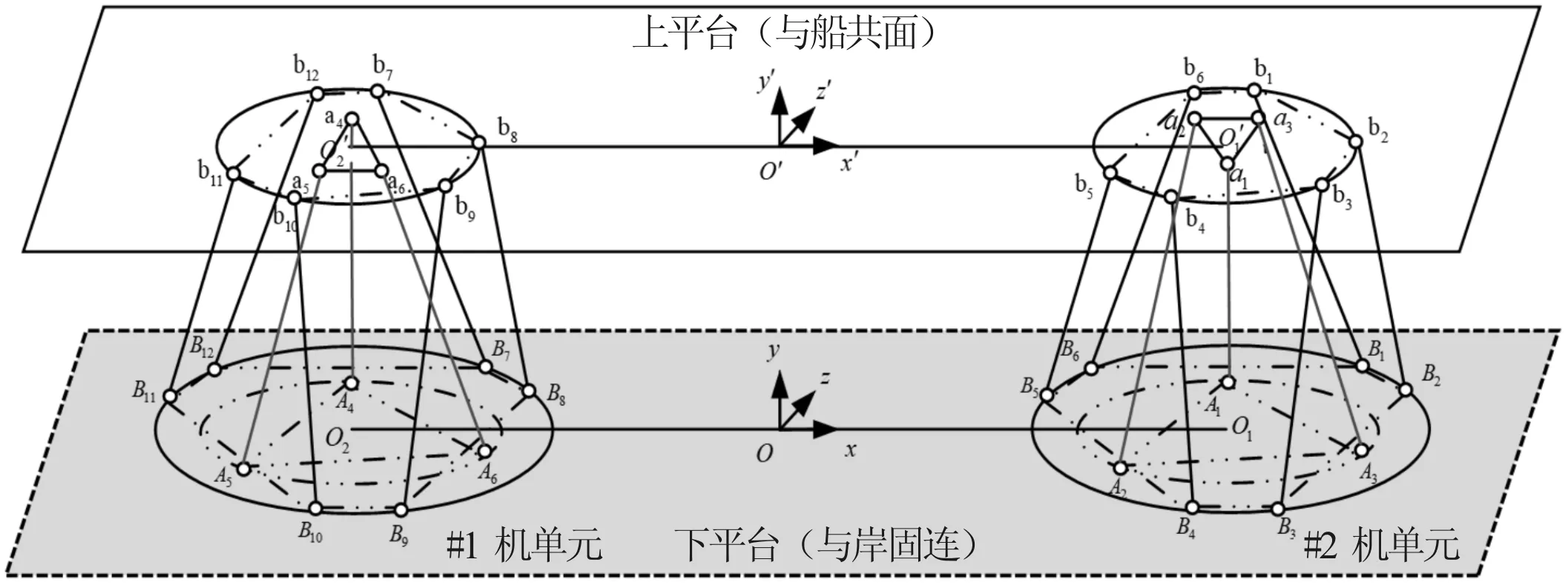
图2 双并联系泊机构等效模型简图Fig.2 Schematic diagram of equivalent model of mooring double parallel mechanism
1.2 机构运动学分析
并联机构的运动学分析是对机构位置、速度及加速度进行分析。机构的位置分析可以分为正解分析和反解分析。正解,即已知机构的驱动参数,对机构末端位置进行求解;反解,即已知机构的末端位置参数,对机构驱动进行求解。常用的方法有解析法和数值法。因为并联机构的反解比较容易求得,经常采用解析法进行求解。而并联机构的正解比较复杂,一般不容易求得,常采用数值迭代的方法进行求解。速度分析和加速度分析是基于位置分析后进行的,常用的方法有影响系数法和矢量求导法等。其中,双并联机构的正解方程组具有非线性,可以采用Newton迭代法进行求解。采用Newton迭代法求正解的过程中,每次迭代都需要重构雅克比矩阵。在实际控制中,对于矩阵求导比较复杂,不断地求导也降低了求解效率。在实际应用中,双并联机构的动系原点并不是固定不变的,随着两个并联单元的运动,两个上平台中心连线的中点也是不断变化的。因此,需要实时对两个并联单元进行位置正解,以确定两个并联单元动平台的中心位置,解算出等效上平台中心点的位置,从而确定船模的位姿信息。由于需要进行大量的正解计算,基于后续控制的简化,可以采用拟Newton法进行求解。拟Newton法在迭代时对雅克比矩阵进行简化,求解过程较Newton法更为简便,其具体求解流程如图3所示[7]。
1.3 系统工作原理
智能系泊方法拟实现的主要功能是希望整合现有缆绳和护舷功能来实现船舶的稳定系泊,当泊位环境条件较好,船舶的运动量符合安全作业范围时,系泊机构与船一起随动,并利用阻尼效应对船舶运动进行减摇;当水文条件变得复杂时,船舶的运动量超出安全作业推荐范围,系泊机构需要进行主动调节,使其恢复在满足要求的范围内运动,其具体工作流程如图4所示。

并联机构与船体吸附在一起随船运动,此时随动的驱动分支充当阻尼缸,由于驱动分支的阻尼特性,并联平台的动平台将不断产生一个与速度方向相反的阻尼力;整体上船的速度越快,系统的“阻尼力”越大,做负功所消耗的能量就越大,船体的摇晃能量被不断消耗,其晃动的程度也就随之减缓,以此达到减摇的目的;与此同时辅助分支的弹簧也将产生反向的拉力或压力,不断纠正船体的位置,使船体的位置在系统随动时保持在预定的范围内。当船体前后上下左右的摇晃幅度过大,超过预先设定的范围时,智能检测系统可以检测出来,并通过力位综合伺服控制系统进行补偿。这时,驱动分支不再随动,而是主动干预,进行位置调整和纠正。当船体的位置在设定的范围时,驱动分支再次进入随动状态。在正常海况下,智能检测系统和力位综合伺服控制系统可以保证船体位置始终保持在预定的范围内,一旦超出预定范围,将进行主动纠偏。一旦遭遇更大波浪导致船体发生位移与摇晃,如正做远离码头运动,由于末端平台速度过大,其反向阻尼力超出安全吸附力,船体就会与末端平台分离,在中间驱动分支作用下,将吸附端收回;如果船体正做靠近码头的运动,速度的突增导致阻尼力变大,及时根据卸荷放气,从调节气缸的阻尼,进入一种低阻尼状态,以此保护机构不受损。
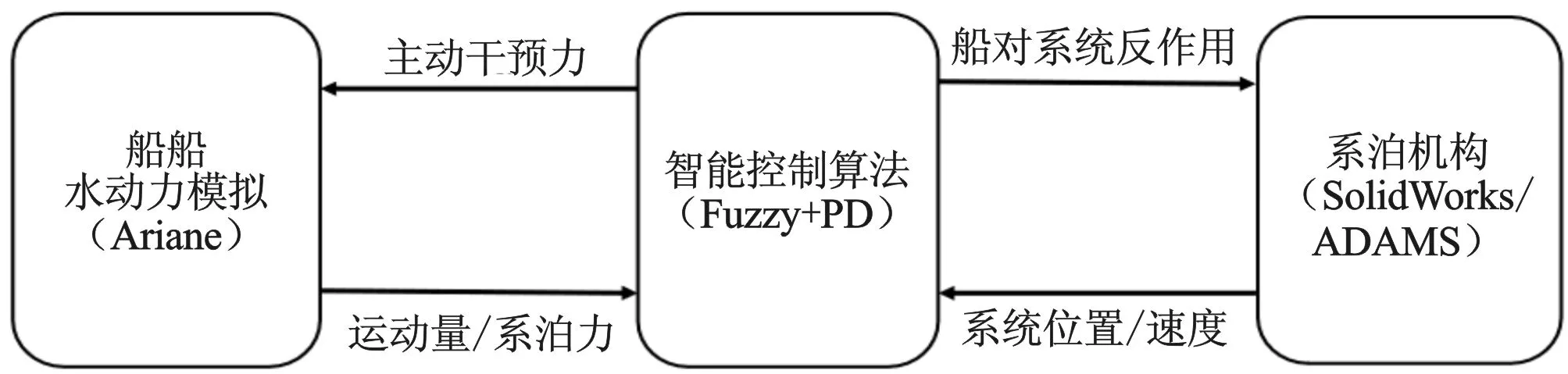
图5 仿真数据交换逻辑Fig.5 Simulation data exchange logic
1.4 虚拟样机与减摇策略
基于等效模型的初步设计方案,通过Solidworks软件构建机械三维系统,联合Labview软件建立控制系统组成虚拟样机,再由Adams实现机械结构的动力学解算,借助Matlab的MSS库作为系泊船的水动力特性计算,将控制律编写在Simulink中,实现系泊机器人与系泊船共同组成的仿真模型进行计算[8-10]。在机械模型中定义检测平台的材料、驱动力和重力等,利用运动学、动力学等领域的理论以及构建的控制系统和软件系统,模拟检测平台的运动和动力特性,从而优化系统控制策略,其数据交换逻辑如图5所示。
在传统的系泊作业中,缆绳和护舷提供了恢复力与阻尼力,限制船舶在一定范围内运动,传统缆绳和护舷会为船舶提供一个系泊刚度,当船体受水动力作用时,整个系泊系统以恢复力与阻尼力的形式抵抗船体运动的能力,如果此时是智能化自动系泊系统代替传统缆绳/护舷装置,则在其受到外力作用时,智能系泊系统将提供抵抗末端位姿变化的能力,主要可通过两种控制策略予以实现:(1)通过并联系统中的辅助分支提供摩擦阻尼(被动式)、驱动分支提供的液压或气动阻尼(主动式),阻尼力能够抑制船舶各个频率上的振幅;(2)保持驱动分支两端的恒压以提供恢复力,恢复力能够将船舶的慢漂运动变为低频振荡(主动式)。
根据虚拟样机的仿真计算,使上述策略得到了印证,即:系泊样机是可以通过摩擦阻尼与气动阻尼予以提供、系泊样机可以保持气缸两端恒压以提供将船舶慢漂运动变为低频振荡的恢复力。
2 智能系泊方案样机
2.1 系泊机构驱动方式
样机设计选型阶段,先后对比了多种驱动方式。其中,电动方案精度高,采用大导程滚珠丝杠副在末端平台随船运动过程中尽最大可能地减小了自身的惯性对船体惯性的影响,位置伺服可靠,方便维护;但其随动效果可能不好。气动方案的启动控制方便,气源容易获得,清洁无污染,成本低廉,根据系缆力比较小的情况,气动出力小反而成为其驱动的优势,同时,气缸的气动摩擦力可以充当阻尼作用;但是由于气体的可压缩性,会导致控制精度不足,这里可以通过控制方式尽可能使其满足要求。液动方案在随动时,液压缸还可以充当阻尼器,给系统提供阻尼力,能起到消耗能量的作用;但液压驱动力较大,可能远远大于试验比例样机的承载力,会造成无法随动,同时,液动方案存在系统庞大,管路复杂,而且存在泄漏污染的可能,不利于水池试验操作。气-液联动的方案结合了气动方式能源供给方便和液压阻尼缸阻尼效果好的优点,适用在出力不大,要求速度平稳的工况;但是气-液联动的柔顺力控制比较复杂。由于是比例试验样机,需要满足的承载力较小,驱动系统在满足控制需求的前提下,系统简单,方便控制、容易实验室维护等是搭建驱动系统的关键点。因此,综合上述的几种驱动方案,选用气动的驱动方式,其控制精度要求不高,可以通过后期的控制策略来实现。
2.2 样机研制与系统构建
系泊机构系统是基于双并联六自由度机构的机电气一体化系统,主要由机械本体、传感检测部分、气动系统及电控系统等组成。机械本体采用2-3UPS/6UPS(U代表万向铰、P代表移动副、S代表球铰)的构型,两个3UPS/6UPS并联单元分别编号#1机和#2机,单机构型如图6所示。同前文所述,为避免初始位置的奇异,系泊机构一个并联单元的驱动分支交叉布置,另一个并联单元的驱动分支呈正三角布置。每个并联单元除了驱动分支位置不同以外,其他结构完全一致。单个并联单元由下平台、双层上平台、驱动分支、辅助分支以及上下铰链等构成。

图6 并联平台单元构型设计方案与样机实物Fig.6 Parallel platform configuration design scheme and prototype drawing
并联结构主要包括:下平台、双层上平台、吸附单元以及辅助分支。下平台与万向节铰座之间用螺钉连接,并通过止口实现精确定位。万向节与气缸配做底座的伸出轴和辅助分支下端盖的伸出轴均采用过盈配合,并通过紧定螺钉固定。气缸及辅助分支通过螺纹与球铰连接,并通过锁紧螺母锁紧。球铰座与双层上平台的下层平台通过止口定位,以螺钉及锁紧螺母拧紧。按照接下来水池测试的码头模型布置,整个装置将沿岸水平方向安装,两个并联单元也沿着水平方向布置,下平台与水池中的桥墩通过 L 型连接架固定,上平台通过吸附单元与船模接触。在整体布置上,双并联平台系统中的#1机单元和#2机单元可分别沿水平、垂直方向根据系泊点间距、水位与船舶吃水情况沿轨道滑动调整。
3 智能化自动系泊作业效果测试
3.1 测试条件
根据所构建的智能系泊样机尺寸,匹配相应比例尺的船模,试验船型采用现有的木质LNG船型模型(λ=60),考虑需有足够的干舷高度以满足吸附盘尺寸,因此船模装载状态仅考虑压载一种状态,船模主要参数见表1所示。船模按重力相似设计需要满足几何相似的同时,船舶的重心、横摇及纵摇周期均经过校准验证,静力相似与动力相似等相似条件[11-12]。试验水深30 cm,水池配备不规则造波机,此阶段仅模拟横浪作用下的测试,试验条件见表2,模型如图7所示。

图7 船舶智能系泊波浪模型测试试验Fig.7 Test of wave model for ship intelligent mooring
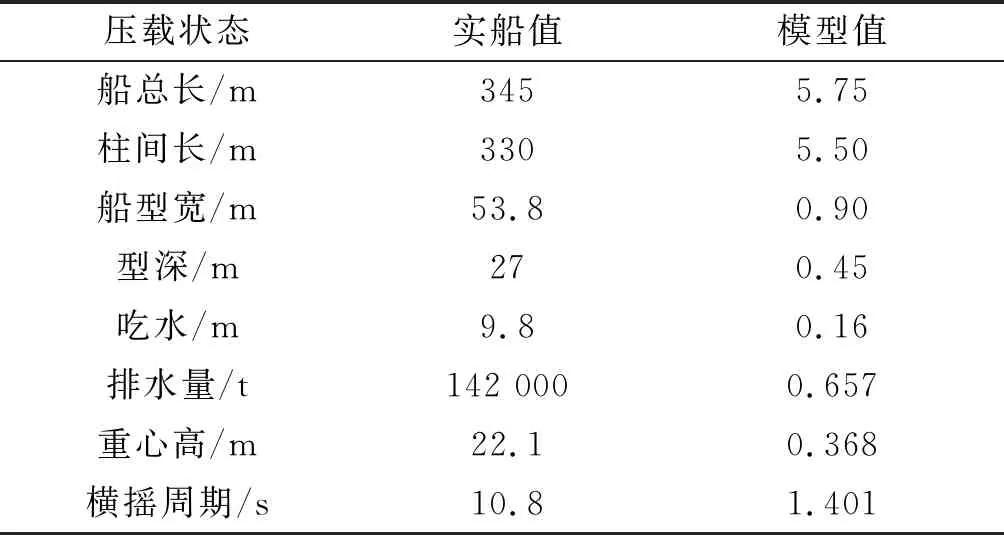
表1 试验船型主要参数Tab.1 Test main parameters of ship type
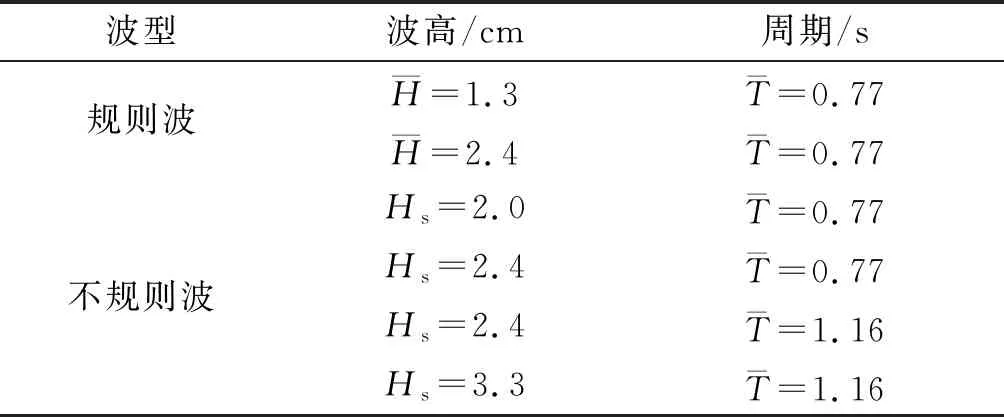
表2 试验波浪条件Tab.2 Test wave condition
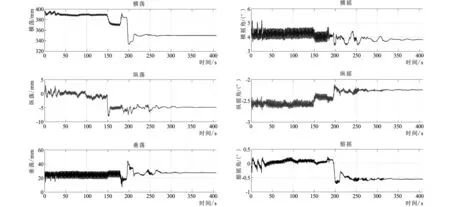
图8 系统干预前后的船模运动量测试结果规则波)Fig.8 Test results of ship model movement before and after systematic s, regular wave)
3.2 试验结果分析


表3 各运动量测试结果统计不规则波)Tab.3 Test results statistics of horizontal direction of the ship movement
不规则波测试中,分别按照全过程系泊系统未加介入干预和全程介入干预两种情况,再将两次测试结果曲线叠加在一张图中对比分析,如图9所示。以对港口系泊影响比较大的船舶水平方向的三种运动量(艏摇、纵荡、横荡)为例,试验统计结果见表3所示。
上述结果表明,系泊系统在介入后对抑制船舶运动起到了一定作用,各运动量均有不同程度的改善,纵荡减小幅值可达42%,横荡与艏摇比较接近,分别为22%和24%,从标准偏差分析,纵荡的约束能力更强。试验结果曲线可见,与规则波相比,不规则波测试的整体效果相对要略差。对此,这将是后续工作中需进一步改进提升的方向,如借助硬件上减少摩擦、软件上缩短控制环路等策略予以优化。
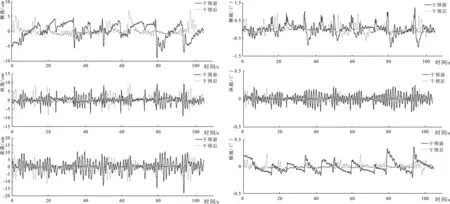
图9 智能系泊系统介入前后六自由度运动量对比(Hs=2.4 cm,Ts=0.77 s,不规则波)Fig.9 Test results of ship model movement before and after systematic intervention(Hs=2.4 cm,Ts=0.77 s, irregular wave)
4 结语
本文基于船舶水动力学及并联平台运动控制理论,从机构构型方案设计、系泊状态下的等效建模、系统构建以及试验样机研制与水池模型测试等方面展开工作,研究提出了一种港口智能化船舶自动系泊作业方法,可通过恢复力与被动阻尼的参数匹配方法,实现自主应对不同的系泊工况的船舶姿态控制,以保持船舶在停靠作业条件的相对稳定,从而达到改善系泊条件的目的。该项研究的主要创新体现在系统方案中的双并联构型的方案设计、利用气动阻尼的调节控制策略等方面。
智能化自动系泊是一种崭新的系泊方式,融合了传统港工、船舶、信息技术和机器人等技术领域,将给传统作业方式带来变革,是码头基础设施适应智慧港口发展的重要一环。今后,智能系泊减摇控制策略的优化提升、相关理论体系的建立与完善、结合码头设计规范的荷载计算方法以及现场应用实践,将是后续进一步开展研究的方向。
