浅谈无人机班组在输电线路运检中工作地点的选择
2022-05-18赖勇耀
赖勇耀,刘 晖
(国网赣州供电公司,江西 赣州 341000)
0 引言
近年来,国家电网有限公司全面推广直升机、无人机和人工协同的输电线路立体巡检新模式,输电线路无人机巡检得到快速发展和应用[1]。多旋翼无人机具有体积小、成本低、操作简单、起降方便等优势,应用于220 kV 及以下输电线路巡检具有很大优势,并可深入班组规模应用,随着续航能力的不断提升,具有广阔应用前景[2]。无人机巡视相较于传统人工巡视,巡视效率和质量都有巨大的提升。根据现场对同一路相同杆段每小时工作时间进行对比,传统人工巡视只能完成3~4 基杆塔的到杆到位巡视,而采用无人机巡视可以完成15~20 个通道巡视。由此可见无人机在输电线路运检中极大地提升了巡视效率[3]。
但是使用无人机巡视单个飞行架次通常只能实现约3.5 km 的通道巡视或者约2 km 的树障巡视,然后需要转场到下一个工作地点继续执行巡视任务。尤其是在山区进行转场,由于道路情况复杂,转场需要花费大量时间。如果工作地点选择不当,转场时间将大大增加,无人机巡视的效率也会因此大打折扣[4]。
为有效解决这个问题,国网赣州供电公司输电管理中心运维一班(以下统称无人机班)结合以往的无人机飞行经验,通过多种软件的辅助,总结出一套切实可行的工作地点及转场路径的选择方法,大大缩短了无人机巡视的转场时间。
1 导航地图
无人机巡视的工作地点一般在电子地图软件中提前选定,赣州公司无人机班采用奥维互动地图与高德地图(百度地图)相结合的方法进行工作地点的选定。奥维互动地图是集成Google 地图、卫星图、地形图、位置分享、指南针等功能与一体的电子地图软件[5](如图1)。在奥维互动地图中无人机班主要使用谷歌卫星混合图,其特点是能查看各个地点的地形,找到高德地图(百度地图)中没有收录的小路、山路的特殊路径,这些特殊的路径通常是转场的捷径,可以极大缩短转场时间;奥维互动地图还可以在生成的杆塔标签之间进行测距,方便无人机巡视的任务规划[6]。高德地图(百度地图)是可以实现在线导航、实时路况的等功能的电子地图软件(如图2),其特点是能实时更新路况、智能导航,许多在奥维互动地图中找不到的新修的道路可以第一时间在地图上更新,在城区工作地点之间进行转场时尤为实用[7]。
图1 奥维互动地图

图2 高德地图
无人机班的巡视工作地点通常覆盖城区与山区,这两款电子地图在Windows、Android 以及IOS 终端都可以进行安装使用,在实际工作中互为补充,从而选择最优工作地点以及转场路径,可以大大缩短转场时间。
2 选择工作地点
无人机班在工作前会先将需要进行巡视的线路杆塔坐标信息导入奥维互动地图中,在奥维互动地图中可以生成直观的标签信息,方便对工作地点进行选择。无人机巡视单个飞行架次可以实现约3.5 km 的通道巡视或者约2 km 的树障巡视,然后前往下一个工作地点接续上一个地点的巡视杆塔进行通道巡视或者树障巡视。以树障巡视为例,无人机班通常先在奥维互动地图中测量出需要巡视线路约2 km 的飞行杆段,以规划杆段末端为第一个工作地点(如图3),车辆到达此地点后就可以进行无人机起降,完成约2 km 的树障巡视任务。第二个工作地点则是以第一个工作地点的杆段末端为起点,在奥维互动地图中测量出约2 km 的飞行杆段,以此次规划的杆段末端做为第二个工作地点(如图4),以此类推。

图3 第一工作地点的选择
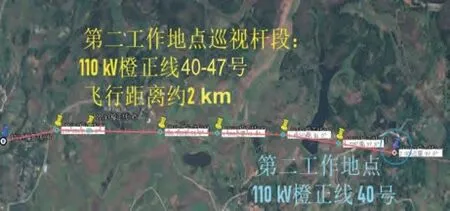
图4 第二工作地点的选择
2.1 城区工作地点的选择
城区工作地点之间一般都有路况较好的公路,因此在奥维互动地图中选择好工作地点后可以直接人工规划转场路径,但是部分新修建的道路奥维互动地图无法做到实时更新。另外一种方法是在奥维互动地图中选择好工作地点后使用高德地图(百度地图)进行导航,高德地图(百度地图)将智能规划时间最短的路径,根据导航引导实现两个工作地点之间的快速转场。
2.2 山区工作地点的选择
山区工作地点之间一般路况较差,而且部分地区没有网络信号无法使用高德地图(百度地图)进行在线导航,因此主要使用奥维互动地图进行工作地点及转场路径的选择。由于城区路况较好可以实现约3.5 km 的通道巡视或者约2 km 的树障巡视,但是如果在山区工作机械套用这个方法,可能出现规划的工作地点在大山里车辆无法到达或者前往规划的工作地点的路况非常差,增加转场时间的情况。因此山区工作地点需要灵活变通。在规划飞行杆段时,不一定要固定3.5 km 的通道巡视或者2 km 的树障巡视杆段,而需要根据飞行杆段末端也就是拟定的工作地点灵活调整飞行距离(由于无人机电池容量固定尽量不要延长飞行距离)。如果发现下一个规划的工作地点车辆无法到达或者路况非常差的地方,可以适当减少飞行距离,以保证方便车辆进行转场。
下面以某次树障巡视任务为例进行说明。如图5,如果机械套用树障巡视2 km 的飞行距离,那么此次工作地点将会定在220 kV雷车Ⅱ线38号杆。但是根据奥维互动地图可知,220 kV 雷车Ⅱ线38 号杆在山里,车辆无法直接到达;而且无人机飞行到该杆塔距离较远,无人机到达杆塔时可能没有图传信号,无法启动树障巡视任务。所以将该杆塔作为工作地点不是最佳选择。

图5 错误工作地点
此时我们应该适当缩短飞行距离,如图6,将此次巡视杆段定为220 kV 雷车Ⅱ线33-37号杆,飞行距离约为1.65 km,这样工作地点将会定在220 kV 雷车Ⅱ线37 号杆,车辆可以到达杆塔附近,无人机启动树障巡视任务时将有良好的图传信号,能确保启动树障巡视任务。不仅减少了一点飞行距离,而且可以提高无人机班组的巡视效率。

图6 正确工作地点
3 结语
输电线路无人机巡检已经得到广泛研究和应用。基于人机协同巡检的输电智能运检模式,实现运检数据的精准分析和可控预警,为运检管理决策提供有力支撑,实现生产指挥及决策的高度智能化和集约化,大幅提升设备状态管控能力和班组管理穿透力。赣州公司对无人班组在输电线路巡视中工作地点的选择问题进行了深入的调查研究,总结出了一套高效科学的方法,这套方法的总体原则是:
1)工作地点尽量选择在车辆可以通行的地方;
2)选择路况较为理想、消耗时间较短的转场路径。把握这两个工作地点及转场路径选择的大方向,再根据实际巡视情况灵活变通,就能进一步提高无人机班组的巡视效率。