微波光子四倍频复合雷达信号生成及目标多维度探测
2022-05-17梁丁丁
梁丁丁,陈 阳
(华东师范大学通信与电子工程学院上海市多维度信息处理重点实验室,上海 200241)
1 引言
雷达波形的产生是现代雷达和电子战系统的基本组成部分,是实现目标高精度、多维度探测的核心使能技术[1,2]. 不同种类的雷达信号波形可用来实现目标不同维度的探测,例如目标的距离、速度和形状[3~5]. 目标的距离测量方法主要包括基于脉冲体制的回波延时测距和基于连续波体制的频率差测距[6],目标的速度测量和形状获取则主要依据多普勒频移和微波成像算法实现. 为了实现高精度目标探测,需要雷达系统能够产生高频率、大带宽的雷达信号波形[7]. 然而,受到“电子瓶颈”的限制,传统电子技术在高频、大带宽雷达信号生成方面面临巨大挑战,越来越难以满足高精度、多维度目标探测的需求[7,8].
近年来,微波光子技术被广泛地应用于雷达系统中,其目的是突破传统雷达面临的频率和带宽瓶颈,是一项具有发展潜力的技术[9~11]. 许多基于微波光子技术的高频、宽带雷达信号产生方法已经被提出[12~18],尤其是线性调频(Linearly Frequency-Modulated,LFM)信号[14~17]的产生方法. 文献[16]使用微波光子四倍频技术产生了瞬时带宽高达8 GHz 的LFM 信号,并用于实现高分辨率实时逆合成孔径雷达(Inverse Synthetic Aperture Radar,ISAR)成像,距离分辨率高达2 cm. 为了进一步提高距离分辨率,文献[17]基于微波光子六倍频技术产生了瞬时带宽高达10.02 GHz的雷达信号,ISAR成像距离分辨率高达1.68 cm. 基于微波光子信号产生技术,一些高精度的目标测量方法也被提出[18~21]. 通常,单啁啾LFM 信号被用来实现目标距离测量和高分辨率ISAR 成像[16,17],而双啁啾LFM 信号被用来实现目标距离和速度的同时测量[18~20]. 文献[18]提出了一种高分辨率的距离和速度测量方法,使用微波光子倍频技术生成“V”型的双啁啾LFM信号,其距离和速度的测量分辨率均能够提高一倍. 文献[19]提出使用多波段双啁啾LFM 信号实现目标距离和速度测量,实验结果表明,目标距离和速度的相对测量误差分别小于0.005%和0.59%. 文献[20]提出使用双波段对称三角LFM 信号实现多个目标的距离和速度测量,实验结果表明,目标距离和速度绝对误差分别小于9 mm 和0.16 m/s.上述方法[16~20]均可以实现目标的高精度测量. 然而,文献[16,17]可以实现距离测量和高分辨率微波成像,但无法准确测量目标速度,文献[18~20]可以实现目标距离和速度测量,但当目标径向速度较大时,2 个双啁啾LFM 信号去斜后的信号将会互相干扰,导致难以进行高质量的ISAR 成像. 针对上述问题,文献[21]提出使用一种复合雷达波形同时实现目标距离和速度测量以及高分辨率ISAR 成像. 在实验中,该复合雷达信号由正啁啾LFM 信号和单音微波信号组成,其信号产生方法是基于微波光子上变频技术. 实验结果表明,目标的距离和径向速度绝对误差分别小于5.9 cm 和2.8 cm/s. 该方法与上述3 种距离和速度测量方法[18~20]的不同之处在于使用单啁啾LFM 信号和单音微波信号的同时实现了目标距离、径向速度的测量和ISAR 成像,且在实验中探测目标处于运动状态而非静止状态,目标回波是真实回波而非由任意波形发生器模拟的回波.
为了进一步实现高精度、多维度目标探测并降低系统对电域信号源的要求,本文提出一种微波光子四倍频复合雷达信号产生方法,该复合雷达信号由单啁啾LFM 信号和单音微波信号组成,其中单音微波信号和单啁啾LFM 信号被联合用于实现目标径向速度测量,单啁啾LFM 信号被用于实现目标距离测量和高分辨率微波成像. 在发射端,使用微波光子四倍频技术生成了瞬时带宽为2 GHz 的正啁啾线性调频信号和频率为13.2 GHz的单音微波信号. 在接收端,目标回波信号经去斜后用来实现距离和径向速度测量以及高分辨率ISAR 成像. 实验结果表明,目标的距离和径向速度绝对误差分别不超过4.2 cm 和1.7 cm/s,多个探测目标成像结果清晰可辨.
2 基本原理
图1 为复合雷达信号生成及目标多维度探测系统原理图. 激光器(Laser Diode,LD)产生的单频光载波通过一个偏振控制器(Polarization Controller,PC)注入双偏振马赫-曾德尔调制器(Dual-polarization Mach-Zehnder Modulator,Dpol-MZM),该光载波可表示为
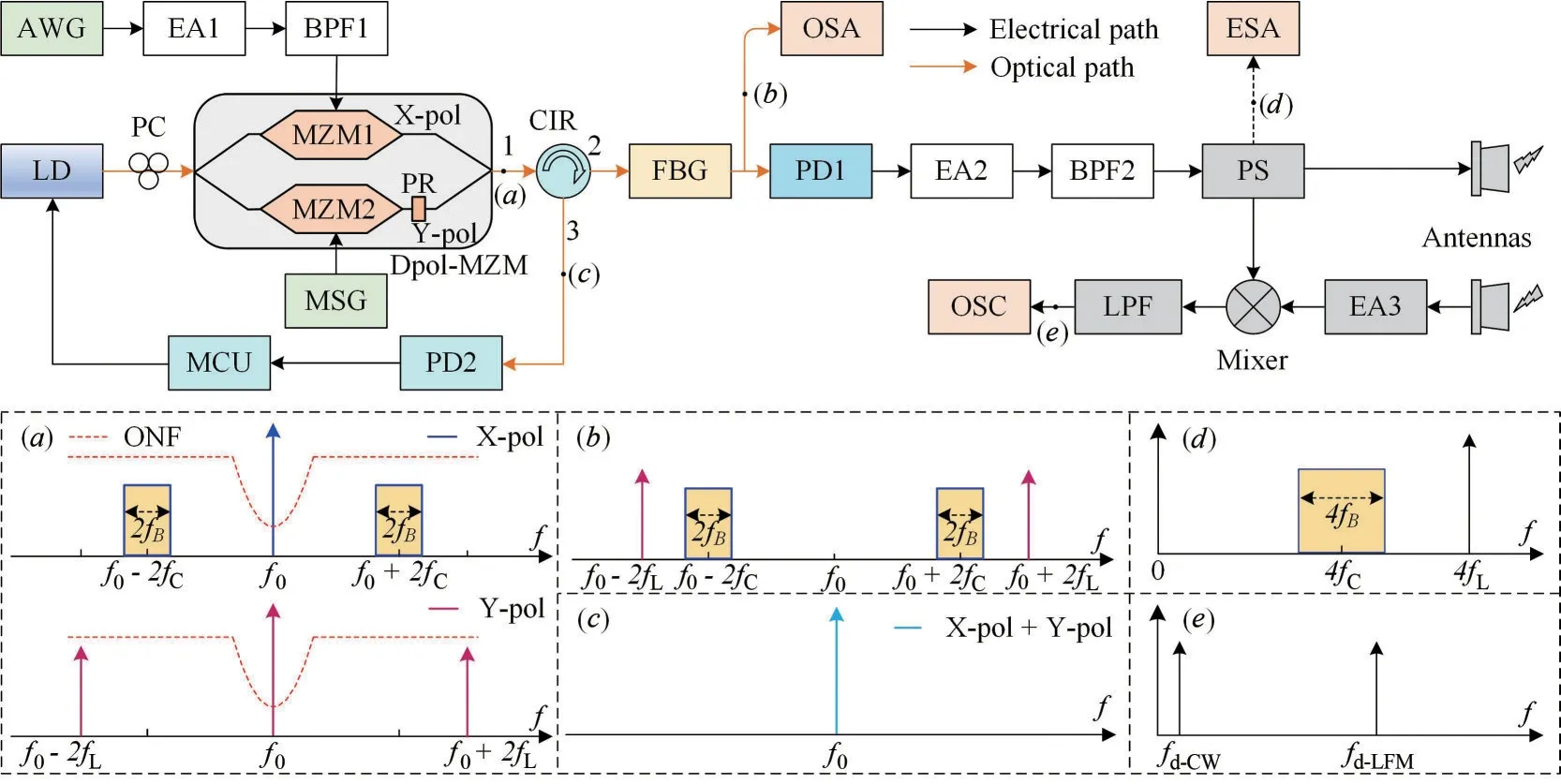
图1 复合雷达信号生成及目标多维度探测系统原理图

其中,E0是光载波的电场幅度;f0是光载波的中心频率.Dpol-MZM 由2 个马赫-曾德尔调制器(Mach-Zehnder Modulator,MZM)组成. 中频LFM 信号由任意波形发生器(Arbitrary Waveform Generator,AWG)生成,经电放大器(Electrical Amplifier,EA1)放大和带通滤波器(Bandpass Filter,BPF1)滤波后用于驱动MZM1 上的射频端口. 频率为fL的单音信号由微波信号源(Microwave Signal Generator,MSG)产生并用于驱动MZM2 上的射频端口. 因此,2个马赫-曾德尔调制器上的调制信号可以分别表示为
其中,V1和V2分别是单音信号和中频LFM 信号的幅度;fC和fB分别是中频LFM 信号的中心频率和带宽;T为中频LFM 信号的脉冲周期;k=fB/0.8T为中频LFM 信号的啁啾率.
调节2 个子调制器的偏置电压使其均工作在最大传输点,此时MZM1和MZM2输出的光信号主要由光载波和±2 阶光边带组成,如图1(a)所示. 为了抑制光载波对复合雷达信号生成的影响,使用一个光纤布拉格光栅(Fiber Bragg Grating,FBG)对Dpol-MZM 输出的光信号进行处理.FBG 的透射谱可以当作一个光陷波滤波器(Optical Notch Filter,ONF),用于滤除光载波,仅保留±2阶光边带,如图1(b)所示.FBG的反射谱将光载波进行反射,被反射的光载波经环形器(Circulator,CIR)的端口3 输出并当作反馈信号,如图1(c)所示. 该反馈回路由一个光电探测器(Photodetector,PD2)和一个微控制器(Micro-Control Unit,MCU)组成,用于根据反射光载波的强度调节激光器中心波长使其与FBG 凹陷位置对齐. 此时,FBG 输出的偏振复用的透射光信号可以表示为

其中,m1和m2分别是MZM1和MZM2的调制指数;Jn(·)为n阶第一类贝塞尔函数. 该透射光信号经PD1 探测后,产生四倍频复合雷达信号,如图1(d)所示. 该复合雷达信号可以表达为
其中,η为PD1 的响应度. 从式(5)中可知,输出线性调频信号的频率和带宽以及单音微波信号的频率均为输入信号的4 倍. 生成的雷达信号经电放大器(EA2)进行放大,并使用带通滤波器(BPF2)消除光电探测器输出信号中的直流分量和非线性成分后,可以表达为

其中,V3和V4分别是单啁啾LFM信号和单音微波信号的幅度. 使用该复合雷达信号即可实现目标多维度探测.首先,将产生的宽带LFM信号和单音微波信号经功分器(Power Splitter,PS)分成2路,一路与混频器(Mixer)本振端口相连作为雷达参考信号,另一路经天线(Antenna)发射用于探测目标. 此时,雷达参考信号可以表达为

其中,E1和E2分别是单啁啾LFM 信号和单音微波信号的幅度. 移动目标反射的雷达回波信号经Δτ延时后由接收天线接收,该延时可以表达为

其中,c是真空中的光速;R0是目标距离天线的起始距离;v是目标的径向速度;t是时间. 接收到的雷达回波信号通过一个电放大器(EA3)进行放大. 放大后的回波信号可以表达为
其中,E3和E4分别是LFM信号和单音微波信号的幅度.
在雷达接收端,采用电域混频方式实现对雷达回波信号的去斜,图2给出了雷达信号去斜处理的基本原理. 经混频器混频、低通滤波器(Low Pass Filter,LPF)滤波后的电信号可以表达为
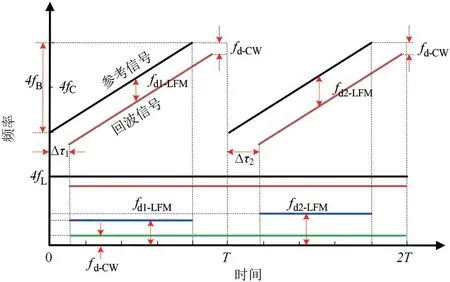
图2 雷达信号去斜处理的基本原理
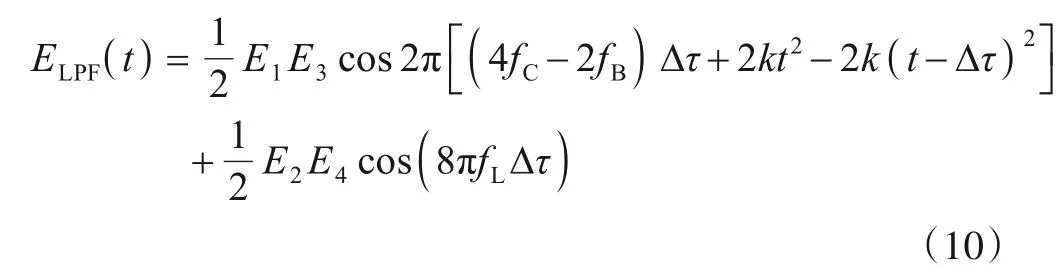
该去斜后的电信号由2个频率分量组成,即
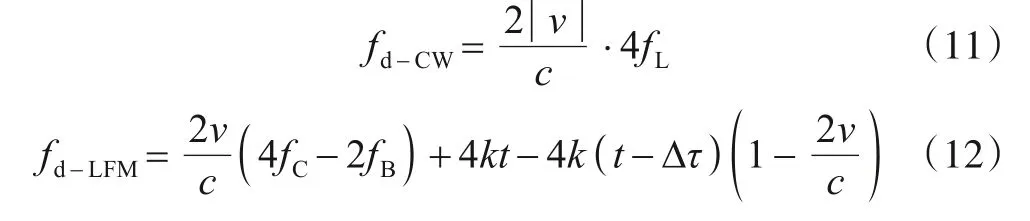
由 于v≪c和(2v/c)(4fC-2fB) ≪4kΔτ,因此,式(12)可以简化为

依据式(11)和(13),目标的距离和径向速度的大小可以表达为
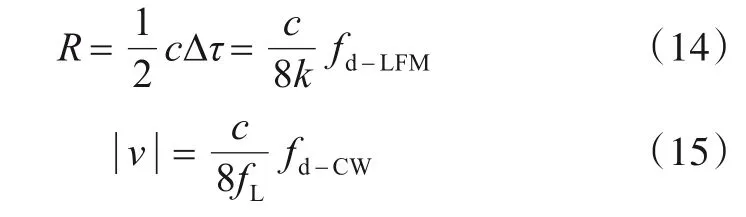
为了确定目标径向速度的方向,需要使用相邻采样的2 个回波信号. 在实际的应用中,目标距离变化引起的去斜频率fd-LFM变化远大于目标速度变化引起的多普勒频率fd-CW变化. 因此,假设相邻2 次采样目标的径向速度不变,若测量的目标距离在增加,可确定目标在远离雷达,此时,定义目标的径向速度方向为正,反之,径向速度方向为负. 通过式(14)、式(15)和上述方法,运动目标的距离和径向速度信息均能够获取.

由于目标速度引起的多普勒频率远小于宽带LFM信号去斜后的频率,因此,使用一个数字高通滤波器可消除多普勒频率对ISAR 成像的影响. 理论上,ISAR 成像的距离分辨率和方位分辨率可以分别表达为其中,B是发射LFM信号的带宽;λ和θ分别是发射LFM信号的中心波长和目标在一帧图像内的旋转角度. 依据式(16)和式(17)可知,高分辨率ISAR 成像可以通过采用大带宽的LFM信号和积累更大的旋转角度来实现.
3 实验结果与分析
为验证该方案的可行性,根据图1所示原理图搭建了实验链路. 在实验中,激光器LD(HLT-ITLA-M-C-20-1-1-FA)输出光载波的中心波长为1550.136 nm,功率为13 dBm. 中频LFM 信号由任意波形发生器AWG(Keysight M8190A)产生,其中心频率、带宽和脉冲周期分别为3 GHz、0.5 GHz和100 μs. 该中频LFM 信号经电放大器EA1(Aeroflex AMPF-107MDA-09)放大和带通滤波器BPF1(KGL YA351-2,2.4~4.1 GHz)滤波后注入双偏振马赫-曾德尔调制器Dpol-MZM(Fujitsu FTM7981EDA)中. 单音信号由微波信号源MSG(Agilent 83630B)产生,其频率为3.3 GHz.Dpol-MZM 输出的光信号经环形器(Circulator,CIR)注入FBG 中,FBG 的中心波长和3 dB带宽分别为1550.136 nm和10 GHz.FBG输出的反射光信号经光电探测器PD2(LSIPD-A75)转换为电信号后输入MCU,MCU 根据反射光载波功率的大小控制激光器的中心波长,使激光器的中心波长与FBG 凹陷位置对齐. FBG 输出的透射光信号经光电探测器PD1(HLT-PD-M-15550-40-0-1-FA)转换为电信号,使用电放大器EA2(CLM 145-5023-293,5.85~14.5 GHz)放大和带通滤波器BPF2(KGL YA356-2,10.4~14.1 GHz)滤波后,得到复合雷达信号,该信号可作为雷达发射信号用于高精度、多维度目标探测.
系统产生的复合雷达信号经功分器PS(Narda MODEL 4456,2~18 GHz)分成两路,一路与混频器(M/ACOM M14A)本振端口相连作为参考信号,另一路经发射天线(GHA080180-SMF-14,8~18 GHz)发射用于探测目标. 目标反射回波经接收天线(GHA080180-SMF-14,8~18 GHz)接收、电放大器EA3(CLM 145-7039-293B,5.85~14.50 GHz)放大后与混频器射频端口相连. 混频器输出的信号经低通滤波器LPF(Mini-Circuits SLP-1650,DC-1.4 GHz)滤波后,输出去斜后的电信号. 该电信号由实时示波器OSC(R&S RTO2032)采样,用于实现目标距离和径向速度的测量以及高分辨率ISAR成像.
3.1 复合雷达信号生成
首先,使用光谱分析仪OSA(Ando AQ6137B)测量了FBG 输入端和透射输出端的光谱以及FBG 透射谱传输曲线,如图3 所示. 红色虚线表示FBG 透射谱传输曲线;黑色实线表示FBG 输入端的光谱,即Dpol-MZM 输出光信号的光谱;蓝色实线表示FBG 输出端的光谱,即FBG 光陷波滤波后光信号的光谱. 从图3 中可知,经FBG进行陷波滤波后,光载波抑制比达到23.0 dB. 需要注意的是,图3 显示的光谱中2 个偏振态的光信号已经叠加在一起,±2 阶的单音光边带和±2 阶的LFM 光边带并不能区分,这主要受限于光谱仪的分辨率.
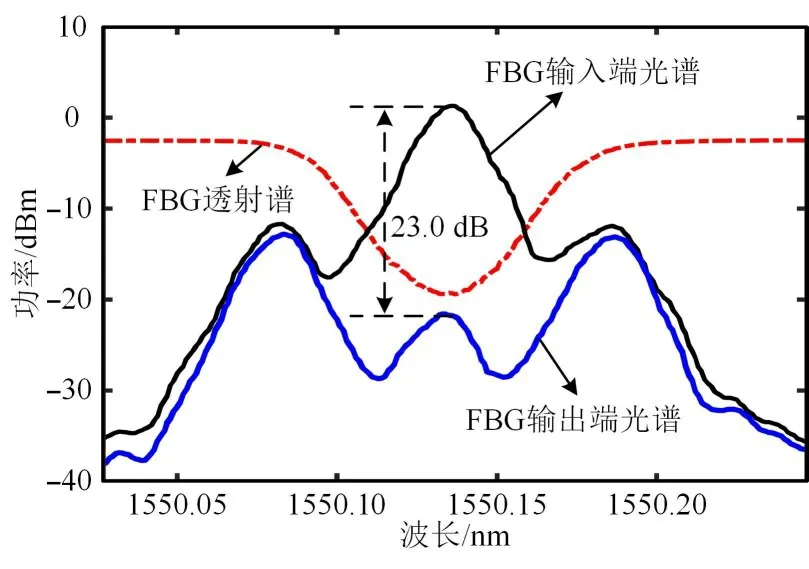
图3 FBG输入端和输出端的光谱及FBG透射谱传输曲线
然后,使用频谱分析仪ESA(R&S,FSP-40)分别测量了AWG 输出的中频LFM 信号和产生的复合雷达信号的频谱,如图4所示. 由图4可知,宽带雷达LFM信号的中心频率和带宽分别是AWG输出的中频LFM信号的4倍,即中心频率为12 GHz、带宽为2 GHz. 在图4(b)中,频率为13.2 GHz 的单音微波信号是由微波信号源产生的频率为3.3 GHz的信号经微波光子四倍频生成的. 需要指出的是,在频率为12 GHz处存在一个干扰信号,这是由AWG 12 GHz 的采样时钟及非线性引起的. 由于干扰信号的功率远小于频率为13.2 GHz 的单音微波信号和宽带LFM 信号的功率,因此,该干扰信号的影响在实验中可以被忽略.
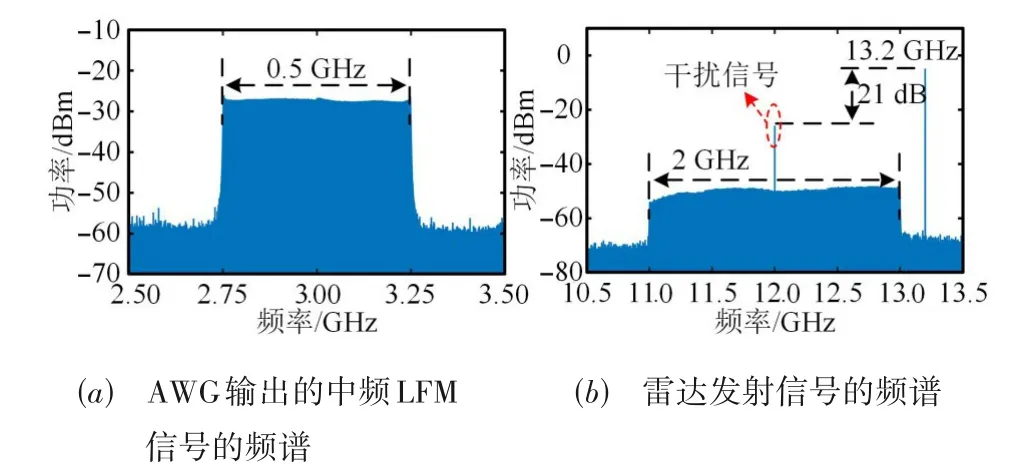
图4 AWG输出的中频LFM信号和产生的复合雷达信号的频谱
3.2 距离和径向速度测量
在实验中,利用系统产生的宽带LFM 信号进行了物体测距. 沿着雷达视线方向,2 个静止的长方体相距8 cm,被测物体的实物图如图5(a)所示.2 个静止目标的反射回波经混频后由示波器进行采样,示波器采样率为4 MSa/s. 图5(b)是一个周期采样信号的频谱. 由图5(b)能够明显地观测到2 个峰值,其频率分别为163.4 kHz和178.5 kHz. 依据式(14),可计算出2个峰值相距9.1 cm,对应的测量绝对误差为1.1 cm.
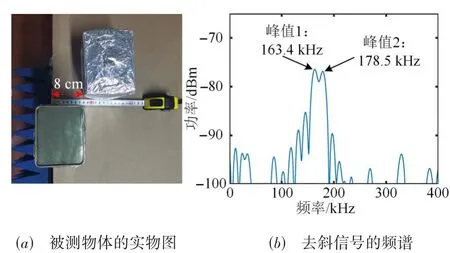
图5 实验情况
为了进一步验证系统的测距和测速能力,使用单个沿圆周运动的圆柱体作为待测目标. 该目标位于转台上,目标与转台中心的距离R为30 cm,转台旋转周期为24.56 s,转台中心与天线距离L为137.5 cm,如图6(a)所示. 在旋转过程中,目标回波的采样受电脑控制,每隔17/16 旋转周期采样一次,共采样17 次,每次采样时间为2 s. 图6(b)是第13 次采样信号的时域波形,经快速傅里叶变换后,频谱如图6(c)所示. 从图6(c)可知,在频率为100 kHz 附近,存在一个较强的干扰信号,该干扰信号主要是发射端发射信号被泄露到接收天线引起的. 由于干扰信号出现的位置与目标回波去斜后的信号在频域上是分开的,因此可用一个数字带阻滤波器来消除该干扰信号对目标距离和径向速度测量的影响. 图6(d)是消除天线自干扰后信号的频谱,其低频分量是目标运动引起的多普勒频率,较高频率分量是宽带LFM 信号去斜后的频率,该实验结果与图2 分析结果一致. 因此,依据式(14)和式(15),可从低频分量处提取目标的径向速度大小,从较高频率分量处提取目标的距离信息. 目标的径向速度方向可通过相邻2 次采样回波信号提取的距离信息进行确定. 图7 是待测目标在转台圆周内不同位置处(通过17 个周期17 次测量得到)测量得到的距离和速度曲线. 其中,蓝色五星和黑色方块分别表示各采样点的测量值和理论值,红色圆圈表示测量误差. 由图7 可知,目标距离和径向速度的测量值与理论值高度一致,其绝对误差分别小于4.2 cm和1.7 cm/s.
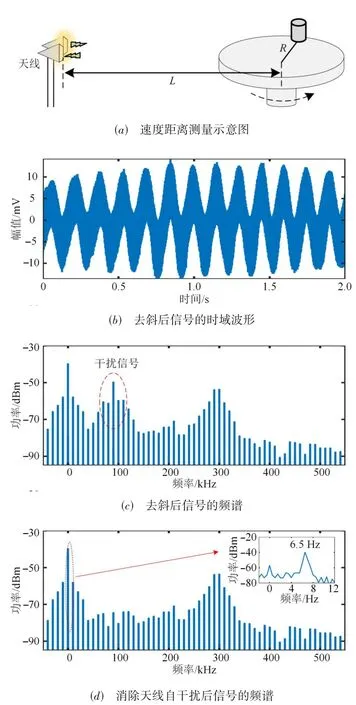
图6 实验结果
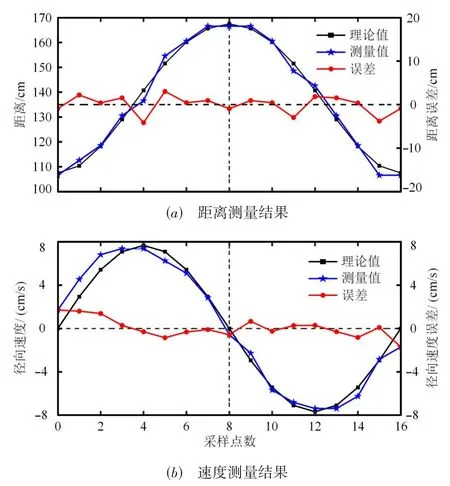
图7 测量结果
3.3 高分辨率ISAR成像
在ISAR 成像实验中,中心频率为12 GHz、带宽为2 GHz 的单啁啾LFM 信号和频率为13.2 GHz 的单音微波信号仍作为雷达发射信号. 为了实现高分辨率ISAR成像,使用一个数字高通滤波器消除单音微波信号和天线自干扰信号对ISAR 成像的影响. 实验中,将3 个圆柱体和3 个长方体置于转台上,具体实验场景如图8(a)所示. 沿着雷达视线方向,转台中心与天线相距为1.52 m,转台旋转周期为24.56 s. 依据式(16)和式(17),带宽为2 GHz的LFM信号对应的ISAR成像距离分辨率为7.5 cm,积累时间为2 s的方位分辨率为2.4 cm.ISAR成像结果如图8(b)所示,6 个目标清晰可辨. 图8(b)中成像结果在方位向和距离向的显示分辨率分别为2.4 cm和6 cm. 由于发射信号是占空比80%的LFM信号,而该图是通过对整个信号周期内的信号使用成像算法得到的,因此图中显示分辨率为6 cm.
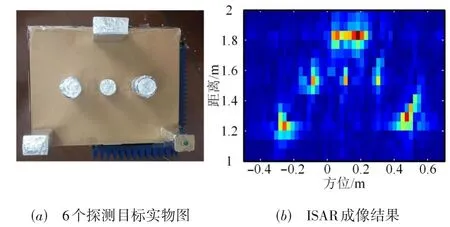
图8 ISAR成像
为了进一步展示系统ISAR 成像的性能,3 个长方体作为探测目标被置于转台的不同位置,如图9(a)所示. 与第一次ISAR 成像实验参数不同之处在于,转台中心与天线相距为1.75 m. 在旋转过程中,目标每隔5/4周期采样一次,共采样5 次,每次采样时间为2 s. 图9(b)是第一次采样后ISAR 成像结果,3 个探测目标清晰可辨. 图9(c)和(d)分别是第三次和第四次的成像结果,同样实现了对目标的高分辨率成像.
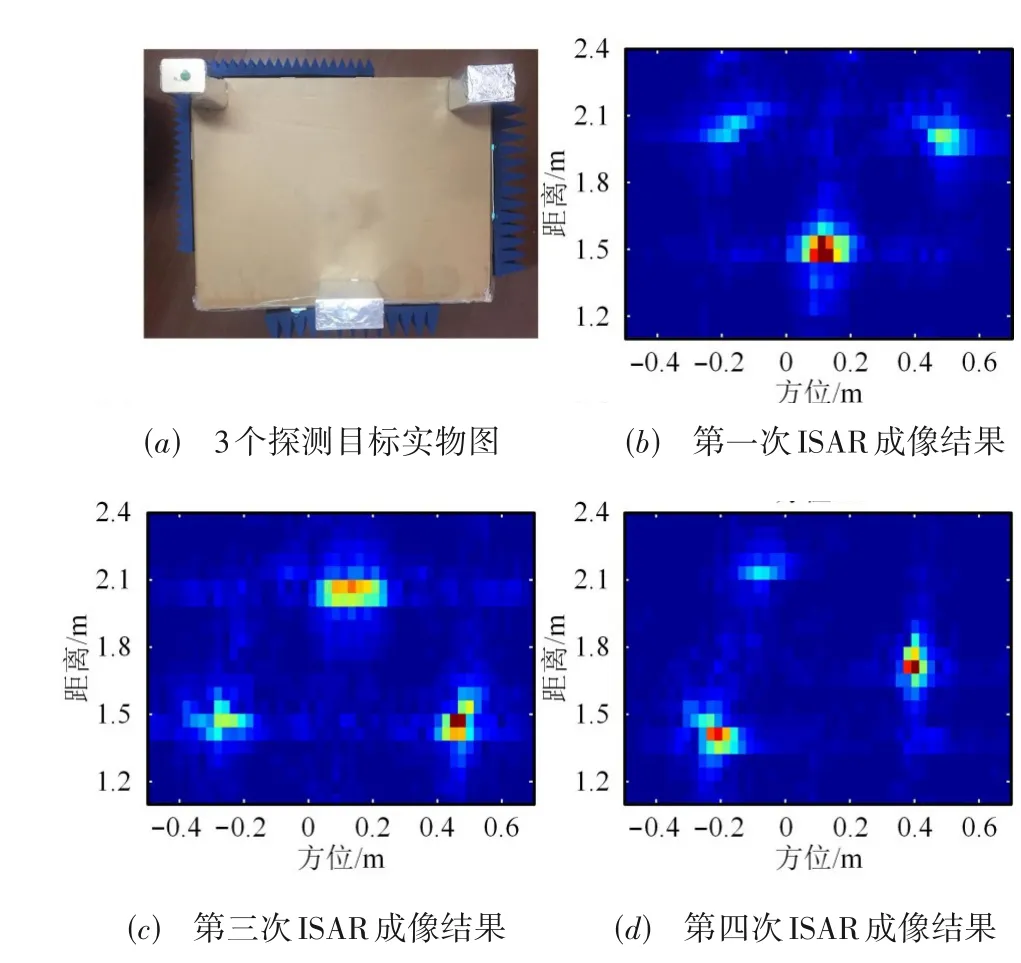
图9 多目标连续多帧ISAR成像
4 结论
本文提出了一种微波光子四倍频复合雷达信号产生方法,该复合雷达信号包括单啁啾LFM 信号和单音微波信号. 通过实验,利用低频、窄带宽的LFM 信号和微波信号生成了频率为11~13 GHz 的宽带单啁啾LFM信号和频率为13.2 GHz 的单音微波信号. 利用该复合信号,可同时实现高精度的目标距离和径向速度测量以及高分辨率ISAR成像. 实验结果表明,目标的距离和径向速度绝对误差分别不超过4.2 cm 和1.7 cm/s,多个探测目标成像结果清晰可辨. 本文所提出的方法可以为测距、测速和成像一体化的多功能雷达提供新的技术途径和解决方案.
