基于车载排放测试驾驶行为对轻型汽油车排放的影响
2022-05-17杨鸣鹏刘海海
于 谦,肖 雄,杨鸣鹏,刘海海
(1. 长安大学 运输工程学院,陕西 西安 710064; 2. 生态安全屏障区交通网设施管控及循环修复技术交通运输行业重点实验室,陕西 西安 710064; 3. 林同棪国际工程咨询(中国)有限公司,重庆 401120)
20世纪90年代提出的生态驾驶理念,旨在改善驾驶人驾驶操作行为,引导驾驶员在驾驶模式上的决策偏好,养成更节能环保的驾驶习惯,从而减少行车过程中燃料消耗及尾气排放.2010—2013年,欧盟能源部开展了ECOWILL项目,通过对驾驶员的生态驾驶培训,有效减少了15%左右的油耗,同时使污染物排放大幅度减少[1].改善驾驶员驾驶行为,倡导生态驾驶,成为道路交通节能减排的一条可行之路.典型的生态驾驶建议有柔和驾驶(轻点油门平缓起步、保持匀速、避免突然加减速、减少不必要的怠速、不空加油门、尽量少用空调、减轻车载、及时检查胎压)、预见性驾驶以及做好车辆的维修与保养等[2].
在生态驾驶推广普及过程中发现,定性的生态驾驶建议并不能有效地指导驾驶员,由于不同国家车辆技术、车用能源、道路交通基础设施和道路交通环境千差万别,不同国家的生态驾驶建议甚至存在相互矛盾的现象,皆因驾驶行为对机动车排放影响机理尚未阐明.驾驶行为与车辆尾气排放间的关联关系有待进一步研究,从而为驾驶员生态驾驶培训,以及生态辅助驾驶系统研发提供科学的评价方法及理论依据.
国内外学者从人、车、路和行车环境4方面开展了大量的生态驾驶研究工作.在驾驶行为方面,主要选取油耗指标,建立甄别-优化-反馈模型,利用驾驶模拟舱,对驾驶员培训以及动态辅助情况下的生态驾驶节能有效性进行评价,及基于先验规则优秀驾驶行为分析及聚类等[3-4].在车辆及发动机控制方面,主要基于车辆动力学、发动机模型、整车燃油经济性及最优控制理论,通过理论推导、实证研究,实现对发动机工作效率最优控制,得出汽车最优节能驾驶策略[5-6].在路侧设施方面,主要集中在交叉口,探讨利用车辆与路侧设施通信技术(V2I),实现交叉口信号控制新方法.改变驾驶员在交叉口的行驶轨迹,减少车辆在交叉口的油耗及排放,对电动车交叉口轨迹进行优化等[7-8].在行车环境方面,主要通过微观仿真模拟,设计不同交通量及车联网比例交通场景,提出优化车辆行车轨迹算法,设计实时辅助驾驶系统,对车辆通过坡道的生态驾驶轨迹进行优化等[9-10].
就目前查阅的资料分析,国内外学者从多个角度对生态驾驶进行了大量有意义的探索.但是目前生态驾驶行为的研究主要选取油耗指标,较少考虑CO、NOx、HC等污染物排放.已有的以减排为导向的研究主要基于排放模型MOVES、CMEM、VT-Micro等,在一定程度上,还不能有效反映我国驾驶员在实际道路上动态行为变化对车辆真实排放特征的影响,尚缺少同时采集驾驶行为及排放瞬时数据的研究.此外,对驾驶行为的分析主要集中在驾驶操作阶段的特性分析.笔者则从驾驶行为链层面开展分析研究,针对驾驶行为多维度特性,分析驾驶行为对路段排放的影响.基于车载排放测试采集的排放数据,通过计算路段排放因子,建立驾驶片段是否生态的特征标签,以驾驶行为多维度特性参数为自变量,建立判别模型.
1 车载排放测试
为了获取实际道路行驶条件下的实时排放及驾驶行为数据,利用车载排放测试设备以及车辆CAN总线采集设备,收集驾驶行为、车辆瞬时工况及机动车瞬时排放数据.获取驾驶人微观驾驶操作数据包括实时的驾驶人对加速踏板、制动踏板、挡位使用等多项微观驾驶操作数据.通过对多设备采集到的初始数据对齐、滤波清洗,提取车辆连续行驶数据序列,重构驾驶行为链.
1.1 汽油小汽车排放测试
汽油小汽车车载排放测试主要采用Sensor公司第4代车载排放测试设备SEMTECH-ECOSTAR及CAN总线设备,在北京市城区展开排放及驾驶行为数据收集工作.考虑CAN总线设备接口限制,选择国V排放标准大众速腾自动挡汽油车,排量为1.4 L,整备质量为1 840 kg,累积行驶里程为3×104km,车辆配置有三元催化转换器等尾气后处理装置.测试时,车辆尾气由尾气管排出进入流量计,测得排出尾气总流量,再通过采样管,进入SEMTECH-ECOSTAR主机进行成分分析,得出各污染物排放浓度及排放率,测试设备如图1所示,其中:温湿度计用来测量周围环境的温度及湿度,校正污染物的排放数据,在试验开始前,需要利用标准气体对仪器进行标定及调零;全球定位系统(global positioning system,GPS )用来对汽车进行定位导航.

图1 汽油小汽车及测试设备
车载排放测试主要采集驾驶员在驾驶汽油轻型车过程中的不同驾驶行为及排放数据.综合考虑道路平均车速、交通量大小、道路拥堵情况以及有无交叉口信号控制的影响,选取2条测试路线,如图2所示,试验线路1全长11 km,试验线路2全长 20 km.选取2位不同驾龄的驾驶员,分别在平峰、高峰时段按照路线进行实测数据采集.

图2 小汽车排放测试路线
1.2 驾驶行为数据处理及指标选取
在搜集和总结国内外生态驾驶研究成果的基础上,从驾驶行为链多维度特性入手,结合车载测试能够获取的微观数据,对驾驶行为特征及车辆运行表现细化,初步构建驾驶行为及车辆运行评价指标体系[11],如图3所示.
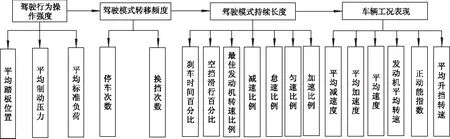
图3 驾驶行为及车辆运行评价指标
选取CO2、NOx和HC基于距离的排放因子作为汽油小汽车排放指标.正动能指数为
(1)
式中:vf为加速状态下最后一秒的速度;vi为加速状态下第1秒的速度;s为在加速状态下车辆行驶的距离;v为t时刻的速度.
平均升挡转速为
ng=t0n01+t1n12+…,
(2)
式中:t0为空挡时间百分比;n01为0挡到1挡升挡平均转速;t1为挡位1使用时间百分比;n12为1挡到2挡升挡平均转速;其余类推.
测试车辆为自动挡汽油小汽车,行驶过程中,驾驶员不直接操作换挡,驾驶员对车辆油门踏板及刹车的控制会通过自动变速箱变换行驶挡位.换挡次数等挡位使用指标,同样是衡量驾驶员驾驶行为的重要指标.
2 汽油小汽车多维度驾驶行为分析
通过车载排放测试数据处理分析,得到4.5万条逐秒排放和驾驶行为数据,根据时间序列及测试记录整合得到201组有效驾驶行为链.
2.1 不同道路服务水平下车辆运行状态
为了分析动态交通流约束下的生态驾驶行为,根据车辆运行速度及道路类型,将道路服务水平分为自由流、稳定流上段、稳定流、饱和流和强制流.通过对试验路段服务水平的观察记录,结合CJJ 37—2012《城市道路工程设计规范》[12],对201组数据所在路段服务水平进行分级,不同服务水平下车辆排放因子如图4所示,其中:S为道路服务水平;EFCO2、EFNOx、EFHC分别为CO2、NOx和HC的排放因子.CO2、NOx和HC的排放因子基本随着道路服务水平的增大而增大,特别是在4级、5级服务水平下,CO2、NOx排放因子有显著的增大.可见在饱和流和强制流,这2种交通流状态下,测试车辆无法保持
平稳的行驶状态,导致车辆排放有显著的增加.为了进一步探究导致排放增加的原因,分析不同动态交通流约束下的驾驶行为,对不同服务水平下的车辆运行指标进行测算比较.不同服务水平车辆运行状态如图5所示,其中:ne为发动机平均转速;a为车辆的平均加速度.
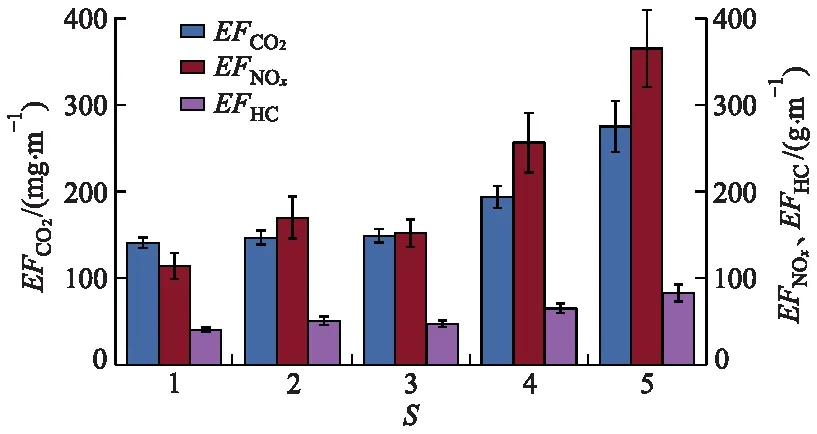
图4 不同服务水平下车辆排放因子
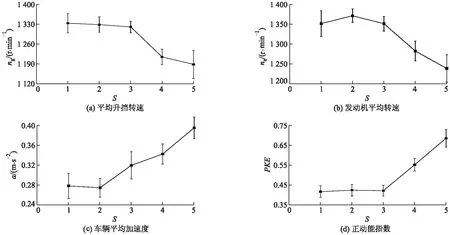
图5 不同服务水平车辆运行状态
从图5可以看出:平均升挡转速、发动机平均转速、车辆正动能指数在1-3级服务水平状态下,都趋于平稳状态,但在4、5级服务水平状态下有明显的变化;平均加速度在3-5级服务水平下明显增加.当交通量不断增加,汽车的行驶自由度降低,受到了周围车辆的干扰,当道路交通趋于饱和状态或者强制状态时,车辆运行状态及驾驶员驾驶行为发生了显著变化.结合不同服务水平下车辆排放因子变化可以看出,驾驶行为的改变导致了车辆工况变化,从而使得排放因子在饱和流和强制流时有显著的增加.
2.2 统计分析
为了进一步分析生态驾驶指标对车辆排放的影响,采用因子分析法揭示影响车辆排放的驾驶行为潜在多维度特性.因子分析结果如表1所示,提取方法为主成分法.旋转法为具有 Kaiser 标准化的正交旋转法,旋转在 6 次迭代后收敛.取前6个公共因子,累计占比为78.787%.从表1可以看出:第1个主成分中,较大负荷值为0.796和0.731,对应指标为平均标准负荷和平均油门踏板位置,第1个公共因子可以命名为加速行为操作强度因子,该因子得分越大说明驾驶员加速操作强度越大;第2个主成分中,负荷较大值有0.896、0.846及0.670,对应指标分别为平均制动压力、刹车时间百分比和平均减速度,第2个公共因子可以命名为减速行为操作强度因子,该因子得分越大,说明驾驶员减速操作强度越大;第3个主成分中,负荷绝对值较大的为0.860和-0.768,对应加速比例及匀速比例,第3个因子可以命名为加速状态持续长度因子,该因子得分越大,说明驾驶员加速状态持续时间越长;第4个主成分中,较大值为0.897和0.906,对应指标为空挡滑行距离和空挡滑行时间百分比,第4个因子可以命名为空挡滑行状态持续长度因子,该因子得分越大,说明驾驶员利用空挡滑行持续时间越长;第5主成分中,较大值为0.924和0.904,对应指标为停车次数和换挡次数,第5个因子可以命名为驾驶模式转移频度因子,该因子得分越大,说明驾驶员变换行驶状态频率越大;第6个主成分中较大值为0.861,对应指标为减速比例,可以将第6个因子命名为减速状态持续长度因子,该因子得分越大,说明驾驶员减速状态持续时间越长.
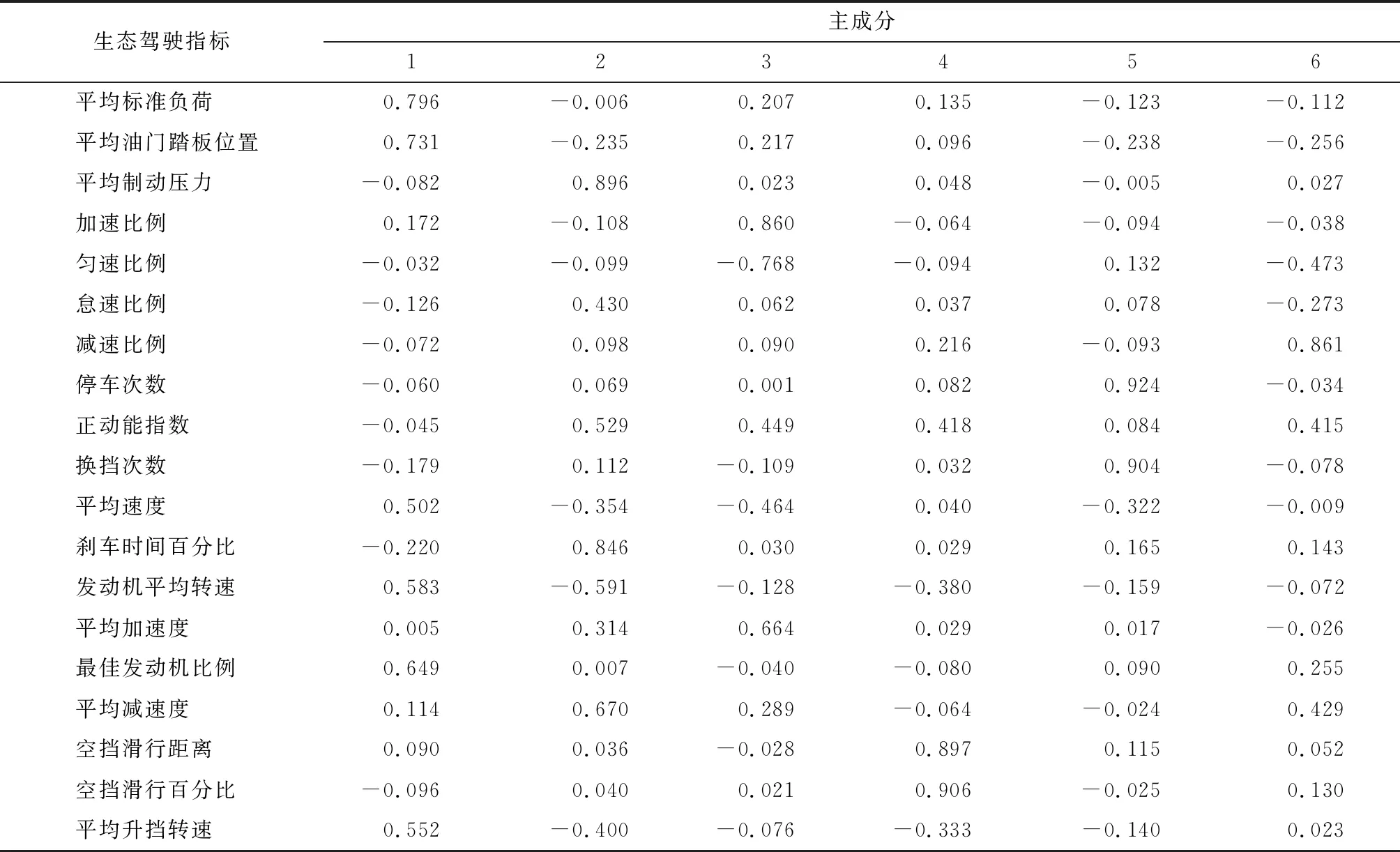
表1 旋转成分矩阵
3 生态驾驶行为辨别模型
基于车载排放测试采集到的逐秒排放数据,计算不同驾驶片段的CO2、NOx、HC排放因子,将201组有效驾驶片段划分为生态驾驶及非生态驾驶2类.然后利用5种机器学习算法,建立生态驾驶行为辨别模型,最终寻找准确率最佳的模型.
3.1 驾驶片段分类
基于驾驶片段的排放因子EF的数值,将驾驶片段划分为A、B、C等级,其对应的驾驶片段的平均排放因子EFav的范围为

(3)

(4)

(5)
此处,结合样本数据及文献[3-4],将A级的驾驶片段定义为生态驾驶,B级、C级定义为非生态驾驶.
3.2 模型的建立
将获得的各驾驶片段驾驶行为生态特性作为特征标签,选取1.2节中影响排放的主要指标作为样本特征.将201组有效片段按照3 ∶7的比例划分为测试集和训练集数据,依托逻辑回归、朴素贝叶斯、神经网络、支持向量机和决策树这5种机器学习算法,建立生态驾驶行为辨别模型.其中:神经网络包含了基于修正线性单元激活函数(relu)、双曲正切激活函数(tanh)、sigmoid激活函数(sigmoid)以及对数激活函数(softplus)的4种算法;支持向量机包含了基于线性核函数(linear)、径向基核函数(rbf)、sigmoid核函数(sigmoid)及多项式核函数(poly)的4种算法;决策树包含了基于基尼指数(gini)和熵(entropy)的2种算法.以基于CO2排放因子得出的生态驾驶行为为例,对各模型参数进行调整,寻找生态驾驶行为辨别准确率最佳的机器学习分类模型,机器学习模型参数调整及准确率如图6所示,其中:Ad为辨别准确率;α为拉普拉斯平滑系数;N为迭代次数;C为惩罚项系数;hmax为最大数深度.
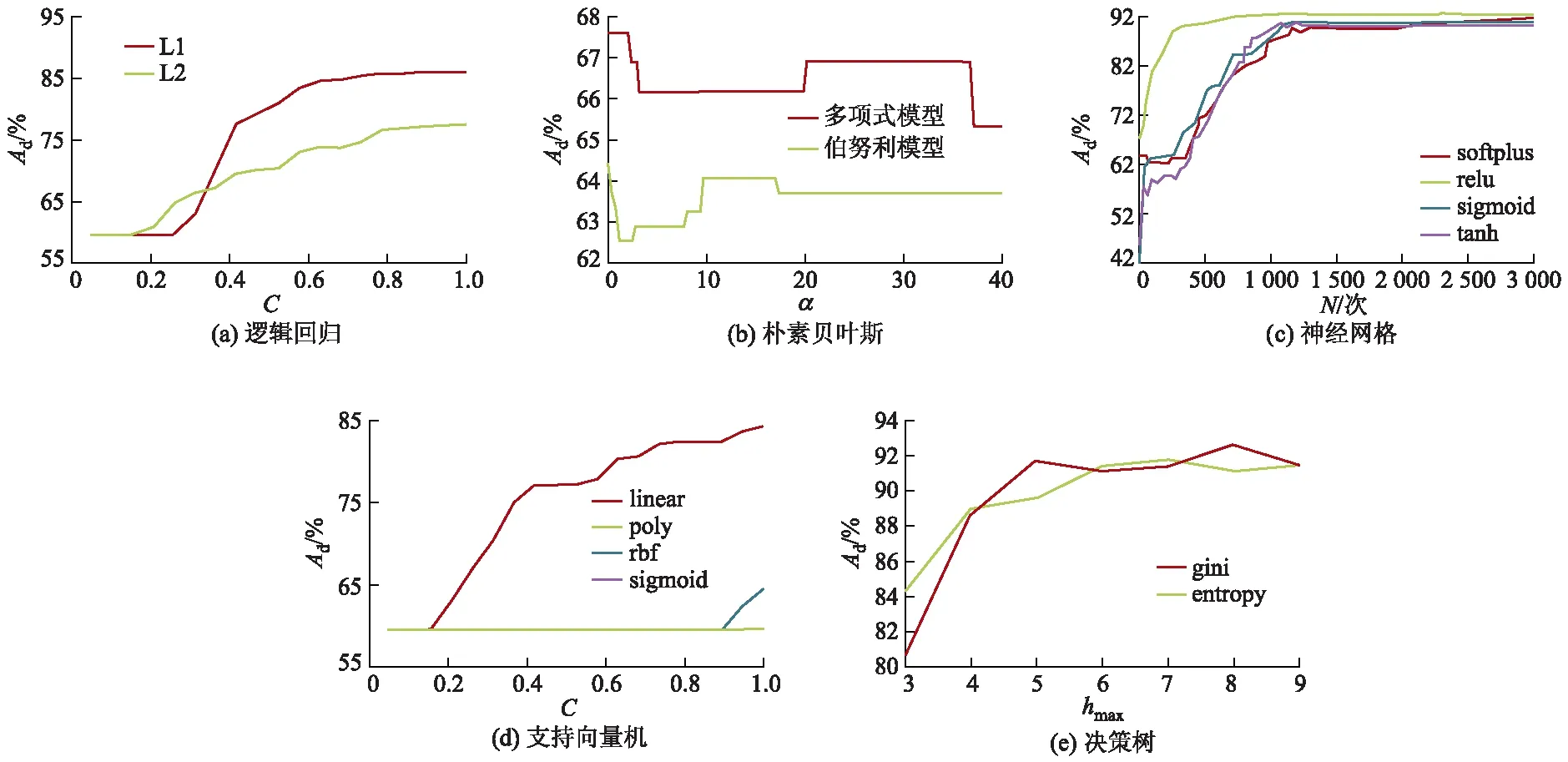
图6 机器学习模型参数调整及准确率
在逻辑回归模型(图6a)中,使用L1正则化比L2正则化效果好,当惩罚项系数C大于0.8时,模型逐渐收敛,训练集及测试集准确率平均值最大为86.00%.在朴素贝叶斯模型(图6b)中,当拉普拉斯平滑系数为0时,多项式和伯努利贝叶斯准确率分别为64.42%和67.64%.在神经网络模型(图6c)中,使用relu函数作为激活函数,准确率最大为91.04%.在支持向量机模型(图6d)中,使用线性核函数并且惩罚项系数为1.0时,准确率为84.31%.而在决策树模型(图6e)中,当最大数深度hmax=8时,模型效果最好,训练集及测试集平均准确率最大为92.68%,最终使用基尼指数建立的决策树模型准确率可达94.00%.通过对比各模型准确率,选取基于基尼指数的决策树建立生态驾驶行为辨别模型,模型的分类结果如下:基于实测CO2排放因子分类为生态驾驶的有165个片段,用建立的辨别模型分类结果辨别为生态驾驶的有162个片段,非生态驾驶的有3个片段; 基于实测CO2排放因子分类为非生态驾驶的有36个片段,用建立的辨别模型分类结果辨别为生态驾驶的有9个片段,非生态驾驶的有27个片段.
4 结 论
1) 当道路交通趋于饱和状态或者强制状态时,驾驶员驾驶行为会发生显著变化.驾驶行为的改变导致了车辆工况变化,从而使得排放因子在饱和流和强制流时有显著的增加.
2) 不仅驾驶操作强度对机动车污染物排放会产生影响,驾驶模式转移频度及驾驶状态持续长度都会对污染物排放产生不同程度的影响.因此,为减少机动车尾气排放,可以从减少加减速强度、加速状态持续时间,以及驾驶模式转移频度角度出发,寻找改善驾驶行为途径.
3) 利用决策树建立辨别生态驾驶行为的模型,具有良好的准确性,可以基于建立模型,在识别非生态驾驶行为的基础上,开发实时生态驾驶诱导系统,助力生态驾驶的发展.
4) 以减排为导向,通过实测排放及驾驶行为数据,探讨了驾驶行为特性与排放的关联关系,但是受到试验条件限制,结合可获取数据,选取了有限的评价指标.只考虑了单车在不同交通流状态下的指标来描述驾驶行为多维度特性.今后将结合跟驰、换道等交通流模型,深入分析多车交互作用下驾驶行为特性与排放特征的关系.
5) 本研究中车载排放测试涉及的测试车辆、路线及测试驾驶员受到了试验条件限制,今后将进一步拓展数据样本,使得研究结果更具普适性,更好地服务于生态驾驶培训及辅助驾驶系统的开发.