一种带宽优化选取的ATF方法及其在齿轮故障诊断中的应用
2022-05-16陈向民牛晓瑞李录平
陈向民,黎 琦,张 亢,段 萌,牛晓瑞,李录平
(长沙理工大学 能源与动力工程学院,长沙 410015)
齿轮作为旋转机械中广泛应用的零部件,主要起到传递扭矩、改变速度、更改方向等作用。在工程实际应用中,齿轮常处于长时间重负载的工况下,极易产生磨损、疲劳剥落、齿面胶合甚至断裂等故障,从而影响设备的安全可靠运行。目前,在齿轮的故障诊断方法中,以基于振动信号分析的诊断方法较为常用。该方法通过采集齿轮的振动信号,利用一定的信号处理方法,分析其特征能量分布与频率成分,进而诊断齿轮故障与否。
目前常用的振动信号分析方法有频谱分析、小波分析[1-2]、EMD/EEMD(empirical mode decomposition/emsemble EMD)[3-4]、LMD(local mean decomposition)[5-6]、VMD(variational mode decomposition)[7-8]等,这些方法对于稳态或准稳态下的齿轮故障检测具有较好的分析效果,但在非稳态工况下也存在一定的局限性,例如旋转设备的启停机、风力发电机等,上述设备的工况变化会引起其转速出现较大的改变,从而使得所测得的信号频谱呈现一定的“频率模糊”现象[9-10]。
针对变转速齿轮振动信号的分析,目前以阶次分析较常用[11-12],其本质是将非稳态的时域信号转化为稳态的角度域信号,去除了转速变化对信号产生的“频率模糊”影响,因而得到了广泛的应用。在阶次分析方法中,基于瞬时频率的阶次分析方法在近些年得到了较多的研究与应用。文献[13]采用了线调频小波路径追踪(chirplet path pursuit,CPP)算法进行瞬时频率估计,进而进行阶次分析,该方法可在无转速信号的情况下,亦可根据估计出来的啮合频率对信号进行角度域重采样,从而实现了故障特征的准确提取。文献[14]提出了基于CPP的时变滤波方法,解决了变转速下多级传动与多个齿轮箱振动信号耦合下的齿轮故障特征提取问题,但由于滤波器的非线性相位特性,导致滤波后的信号存在一定的相移。针对相移问题,文献[15]提出了基于零相位滤波的自适应时变滤波(adaptive time-varying filtering,ATF)方法,该方法对转速变化下的齿轮故障特征提取具有较好的分析效果。
研究表明,在ATF方法的滤波过程中,滤波带宽将直接影响滤波效果的优劣。目前,滤波带宽的选取需依据经验人为选取,具有较大的主观性,且针对不同的信号需要选取的滤波带宽也不同。因此,针对ATF方法中滤波带宽的优化选取问题,提出将边频带阶次能量与齿轮啮合阶次能量的比值作为指标,用于衡量滤波效果的优劣,再利用该比值选取最合适的带宽将故障信号过滤出,以达到自适应选取带宽的目的。利用本文方法对变转速下的齿轮局部故障信号进行了仿真和试验分析,结果表明,该方法能够根据不同的调制信号自适应地选取合适的滤波带宽,具有较好的信号分析自适应性。
1 ATF方法
ATF方法是一种基于数据驱动的非平稳信号分析方法,它可根据信号的自身变化特点,自适应地改变中心频率和带宽,具有较好的信号分析自适应性,且非常适合于频率变化下的非平稳调频调幅信号分析。ATF方法主要包括两个方面:① 信号的瞬时频率估计;② 滤波器类型选取及其参数设置。已有文献表明:CPP算法不仅具有较高的瞬时频率估计精度,而且具有较好的抗噪性能。因此,本文沿用CPP算法进行瞬时频率估计,其具体计算原理与步骤详见文献[16]。
1.1 ATF
ATF是依据经典滤波器设计改进而来,其基本原理是在每一时刻均设计一个经典滤波器(主要包括滤波中心频率和滤波带宽)。与传统滤波器不同的是:在不同时刻,自适应时变滤波器的中心频率和滤波带宽均随时间发生变化,如图1所示。图中的灰色部分表示通带,黑色部分为阻带,中间黑色线条表示中心频率。
ATF中的滤波器设计主要包含滤波器类型和滤波器参数的选取。对于信号的滤波,一般要求滤波器具有尽可能陡的过渡带,以有效滤除截止频率以外的频率成分,而chebyshev Ⅱ型滤波器具有较为陡峭的过渡带,且在阻带内具有等波纹特性,比较满足非平稳调制信号的滤波要求。因此,本文以chebyshev滤波器为原型滤波器,并选用其Ⅱ型滤波器来设计时变滤波器。除幅频特性外,滤波器的另一个重要的方面就是相频特性,为使信号不失真地通过滤波器,则要求滤波器在通带内具有较好的线性相位,而chebyshev滤波器的低阶滤波器接近于线性相位,因此,本文中选取滤波器的阶数为4,阻带波纹为20 dB。
ATF的主要设计步骤如下:
步骤1对于非平稳调幅调频信号s(t),假设其载波频率为fz(t),调制频率为fr(t),t={t0,t1,…,tN-1},N为信号长度。
步骤2对于任一时刻t=ti(0≤i≤N-1)的时变滤波器设计为:以fz(ti)为中心频率,fr(ti)的n倍频为半带宽,以chebyshevⅡ型滤波器为原型滤波器,选用MATLAB中自带函数cheby2.m来设计时变滤波器H(ti,f)。
(1)
步骤4对于所有时刻t={t0,t1,…,tN-1}的滤波,重复步骤2~步骤3,即可得到所有时刻的滤波信号点s′(ti),ti=0,1,…,N-1。将所有时刻信号点按时间顺序排列即可得到自适应时变滤波后的信号s′(t)={s′(t0),s′(t1),…,s′(tN-1)}。
1.2 能量阶次比K
对于滤波器设计来说,滤波带宽的选取对滤波结果具有较大影响:滤波带宽过宽,容易使噪声信号混入,降低信噪比;滤波带宽过窄,又可能削弱有用信号,增大滤波误差,因此,合理的滤波带宽选取对提高滤取信号的信噪比,减少滤波误差具有重要意义。在1.1节步骤2中涉及了滤波带宽的选取,传统时变滤波器的滤波带宽是根据人为经验来设置滤波带宽,具有较大的主观性。因此,如何降低滤波带宽的人为主观性,并根据信号的自身特点自适应地选取滤波带宽是本文的主要研究目标。
齿轮出现局部故障时,其啮合频率周围会产生调制边频带,边频带的能量大小可在一定程度上反应故障的严重程度。而不同的调制频率需设置不同的滤波带宽。因此,可依据啮合频率能量与其调制边频带的能量比值来设置滤波带宽。由于变转速下的齿轮故障信号为非平稳调幅调频信号,要计算其啮合频率及其调制边频带的能量需将各个分量准确提取,计算量较大且比较难以精确提取,因此,本文提出以齿轮故障信号的阶次谱中啮合频率所在阶次与其相邻阶次(即边频阶次)的能量比作为滤波带宽选取的依据,阶次能量比K的计算公式见式(2)。
(2)
式中:N为齿轮齿数;EN为齿轮啮合阶次所对应的能量;Ei为阶次i所对应的能量;j为最大调制阶次,即计算能量时的分析阶次为1倍~j倍转频调制阶次,本文中j取3。
1.3 最优带宽的确定
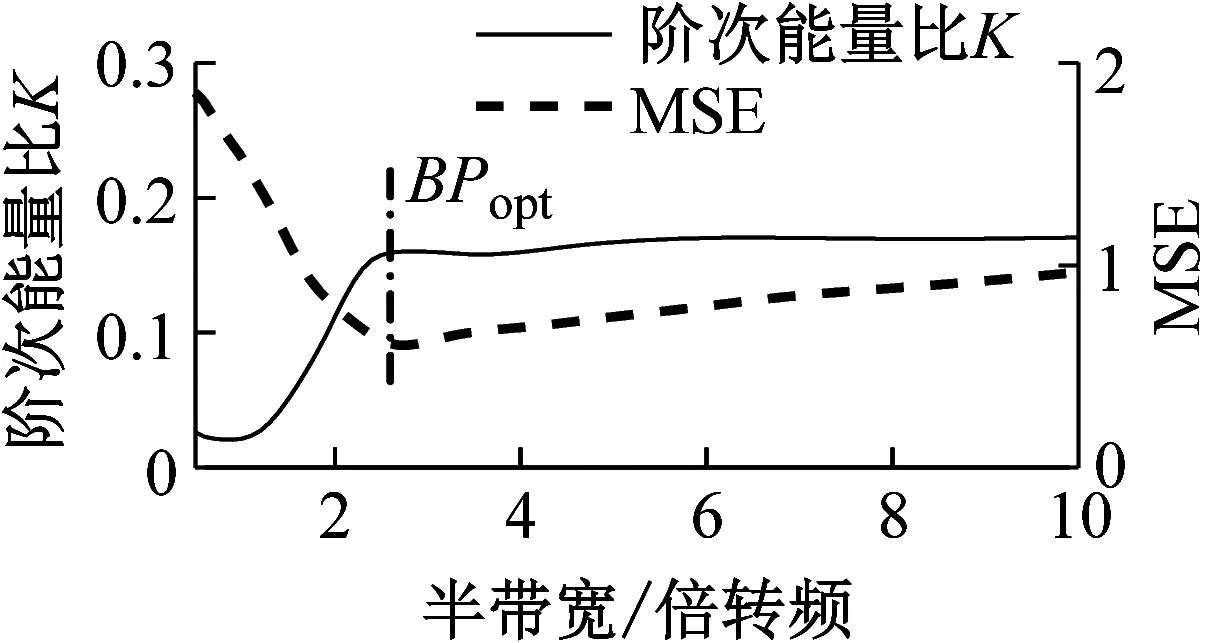
由式(2)可知,K值反映了边频带与啮合频率的能量比大小。若K值越大,则表明边频带与啮合频率的能量比值大,边频带也越突出。但对于某一确定的调制信号而言,当滤波器的带宽很窄时,滤波器会将处于通带中心的啮合频率保留,而将未处于通带内的边频带去除,此时边频能量接近于0,故K值接近于0;但随着滤波带宽的逐渐增加,当通带能将边频带保留时,K值会瞬间增大,因此,K值会在边频带所对应的半带宽之后产生一个明显涨幅,随后K值会趋于平稳,如图2所示。同时,考虑噪声及其滤波器通带和阻带内的波纹等影响,实际分析中的K值曲线会出现一定程度的波动。
为有效滤取边频带信号,滤波器的带宽需满足两点要求:① 边频带信号需处于滤波通带内;② 滤波带宽不宜过宽。因此,可选取K值明显涨幅后、刚至平稳处的交界点所对应的半带宽作为最佳半带宽(见图2中BPopt所对应的半带宽),此时的带宽能在有效保留边频带信号的前提下而不降低信噪比。

图2 最优带宽选取示意图
为自适应选取最优带宽,即BPopt所对应的半带宽,对于实际信号的分析,其具体实现步骤如下:

2 最优带宽下的齿轮故障诊断步骤
齿轮啮合频率及其边频带携带了齿轮故障的重要信息,该信息可在一定程度上反映齿轮的故障类别及其故障程度,因此,对其进行精确提取可为齿轮故障的准确识别提供重要支撑。ATF方法是一种自适应非平稳信号分解方法,可有效提取转速变化下的齿轮故障信号。但传统的ATF方法需根据先验知识来设置滤波带宽,具有人为主观性。因此,针对ATF方法中的自适应带宽选取问题,本文以边频带阶次与齿轮啮合阶次的能量比为指标,提出了一种基于带宽优化选取的ATF方法,并将其应用于转速变化下的齿轮故障信号分析中。该方法的基本步骤如下:
步骤1假定传感器拾取的变转速下的齿轮故障振动信号为s(t),t={t0,t1,…,tN-1},N为信号长度;齿轮齿数为T。
步骤2采用CPP法对信号s(t)进行频率估计,获取齿轮的啮合频率fz(t);用齿轮啮合频率fz(t)除以齿数T便可得到其转频fr(t),即fr(t)=fz(t)/T。
步骤3选择原型滤波器,初始化最大调制阶次j(如式(2)所示),并设置滤波器半带宽的变化步长。本文中选取chebyshevⅡ滤波器作为原型滤波器;设定最大调制阶次设置为3,即所需分析的调制阶次为1倍~3倍转频阶次;滤波器半带宽的变化步长为0.1,即步长为0.1倍转频。
步骤4根据步骤3中的参数,以及估计出的啮合频率fz(t)、转频fr(t)设计自适应时变滤波器H(t,f),并用时变滤波器H(t,f)对齿轮故障振动信号s(t)进行滤波,便可得到降噪后的包含齿轮故障特征的滤波信号s′(t)。
步骤5利用转频fr(t)对滤波信号s′(t)进行等角度重采样,得到其角域信号s(ω)。
步骤6对角域信号s(ω)进行傅里叶变换,得到其阶次谱,并根据阶次谱计算阶次能量比K值。
步骤7改变滤波半带宽(即改变滤波步长),重复步骤4~步骤6,即可得到滤波半带宽与阶次能量比K之间的变化关系。
步骤8选取最佳K值(即Kopt)所对应的半带宽作为最优半带宽(即BPopt)来设计时变滤波器,并对信号s(t)进行分析;同时根据最优带宽下阶次谱中的调制边频带来诊断变转速下的齿轮故障。
本文方法流程如图3所示。
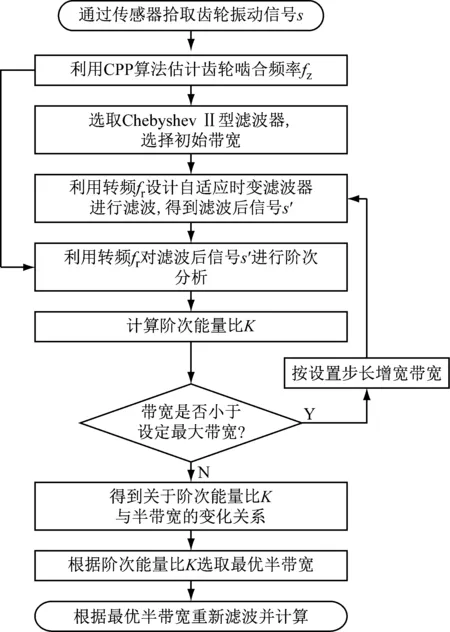
图3 本文方法流程
3 算法仿真
当齿轮发生故障时,齿轮的啮合频率会被转频或倍频所调制。因此,为了检验本文方法的有效性,且限于篇幅,以单一倍频调制信号(分别为:1倍转频调制信号、2倍转频调制信号、3倍转频调制信号)为例进行分析,设置的原始信号s0(t)如式(3)所示,模拟齿数为29,并且在原始信号s0(t)中加入-7 dB高斯白噪声n(t),得到合成信号s1(t)。
(3)
式中,m分别取1、2、3。
1倍、2倍和3倍转频调制时合成信号的时域波形图,如图4所示。从图4可知,合成信号s1(t)基本被噪声所淹没,无明显的周期性时域特征。
(a)1倍转频调制
采用本文方法对合成信号s1(t)进行分析,其中滤波半带宽以0.1倍转频为分析步长,半带宽范围从0.3倍~10.0倍转频,可得到滤波效果指数——阶次能量比K关于半带宽的变化曲线;同时,采用均方误差(滤波后的信号与原始信号的均方差值,MSE(main squared error))作为指标以检验滤波效果,可得到MSE关于半带宽的关系曲线。调制频率分别为1倍、2倍、3倍转频时,滤波效果指数K和MSE关于滤波半带宽的变化曲线,如图5所示。
通过图5可知,当半带宽接近最优半带宽时,K值将出现峰值拐点,此时,所对应的MSE值也最小,因而,此处K值(即竖虚线BPopt所在位置)所对应半带宽即可作为最优半带宽。
关于阶次能量比K和MSE随着半带宽的变化趋势,需要说明的有:① 半带宽小于且远离调制频率时,此时,由于滤波器未能有效将调制信号提取出来,因而,K值变化平稳且值较小,而MSE值较大;② 半带宽小于且逐渐接近调制频率时,此时,所对应的调制信号会逐渐被滤波器所保留下来,故滤波后的边频能量会增加,从而导致阶次能量比K增大,而所对应的MSE值减小;③ 半带宽大于调制频率时,由于噪声以及滤波器通带和阻带内的波纹等影响,因而其K值会出现一定程度的波动;而随着带宽的增加,保留的噪声成分会逐渐增加,因而,MSE值会呈现上升的趋势。
由图5可知,调制频率分别为1倍、2倍、3倍转频时,自适应选取的半带宽分别为2.6倍、3.7倍、5.1倍转频。若采用经验带宽,以1倍、3倍、5倍、7倍转频为半带宽与自适应选取带宽进行比较,计算后其结果与原信号的MSE分别为如表1所示。
(a)1倍转频调制

表1 经验带宽与自适应选取带宽滤波的MSE值
由表1可知,在1倍频调制情况下,自适应选取滤波半带宽虽然比3倍转频的滤波半带宽的均方差值略大,但两者之间的带宽较为接近;而在2倍、3倍转频调制情况下,其MSE值均低于经验带宽,表明该方法能够根据不同的调制倍频自适应选取带宽以达到最优滤波的效果。
调制频率为1倍、2倍和3倍转频调制、自适应选取半带宽为2.6倍、3.7倍、5.1倍时的阶次谱图,如图6所示。从图6可知,采用自适应选取的带宽进行分析,其阶次谱中整体噪声水平较低,齿轮啮合阶次及其边频阶次幅值突出,易于识别。
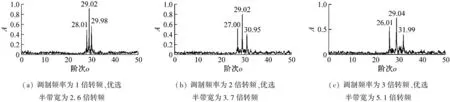
图6 不同调制频率及其优选半带宽下的阶次谱
为增加对比,采用EEMD方法对合成信号进行分析,并选取包含故障信息的IMF1进行阶次谱分析,1倍、2倍和3倍转频调制时的阶次谱,如图7所示。对比图6可知,经EEMD方法分析的阶次谱中,其齿轮啮合阶次与边频阶次幅值较低,整体噪声水平相对较大,且部分边频带不易识别。
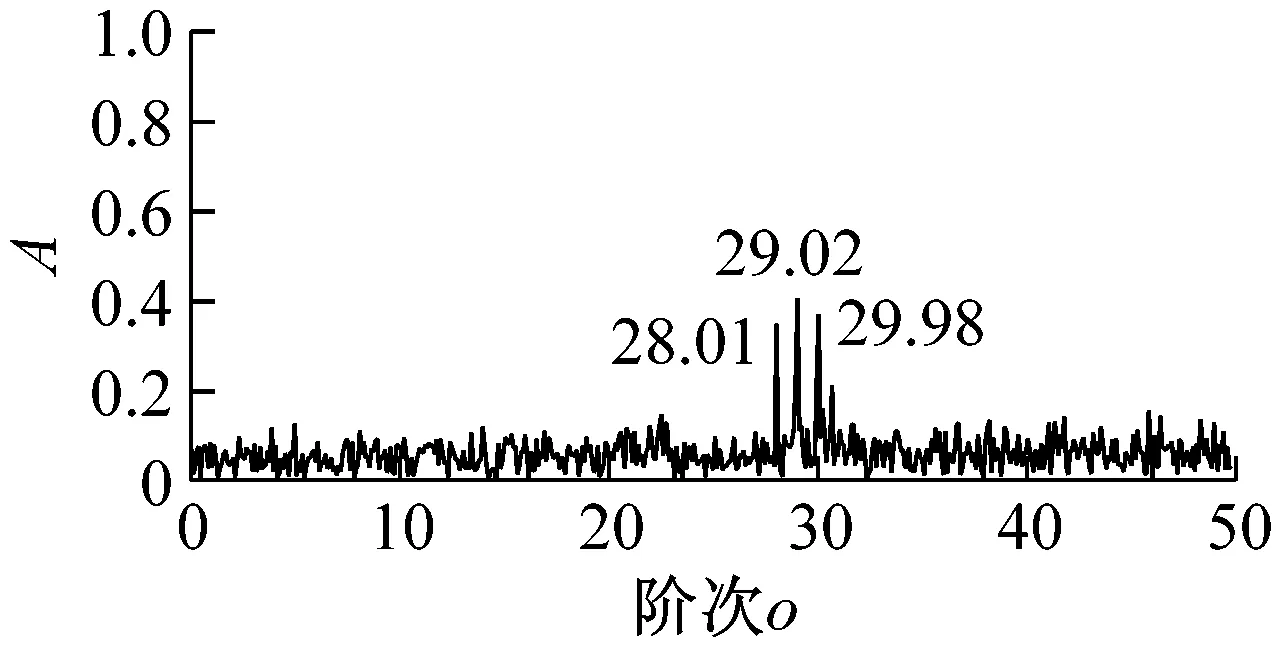
(a)1倍转频调制
4 应用实例
为检验本文方法在实测齿轮故障信号分析中的有效性,在齿轮箱上进行试验,采用LMS(Leuven measurement & system)数据采集仪同步采集振动加速度信号和主动轴转速信号。试验的齿轮为正齿轮,主动轴齿轮与从动轴齿轮均为37,断齿故障设置在主动轴齿轮上。采样频率为4 096 Hz,采样时长为0.5 s。
变转速下拾取的齿轮断齿故障振动信号的时域波形图,如图8所示。从图8可知,信号中存在一定的冲击成分,但冲击成分之间的幅值差距较大,且无明显规律性,因而无法有效识别故障。
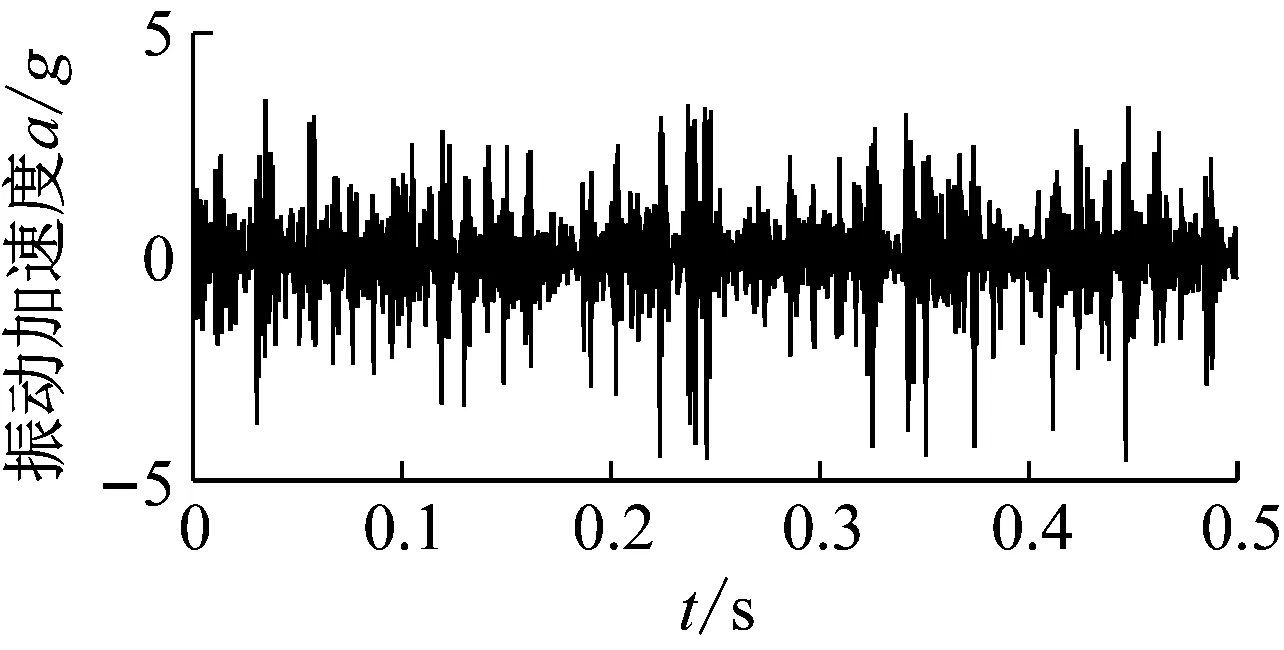
图8 齿轮断齿故障振动信号
利用CPP算法所估计出的齿轮啮合频率,如图9中的实线所示,虚线为根据转速传感器计算得到的实际齿轮啮合频率,图9中两曲线基本接近。
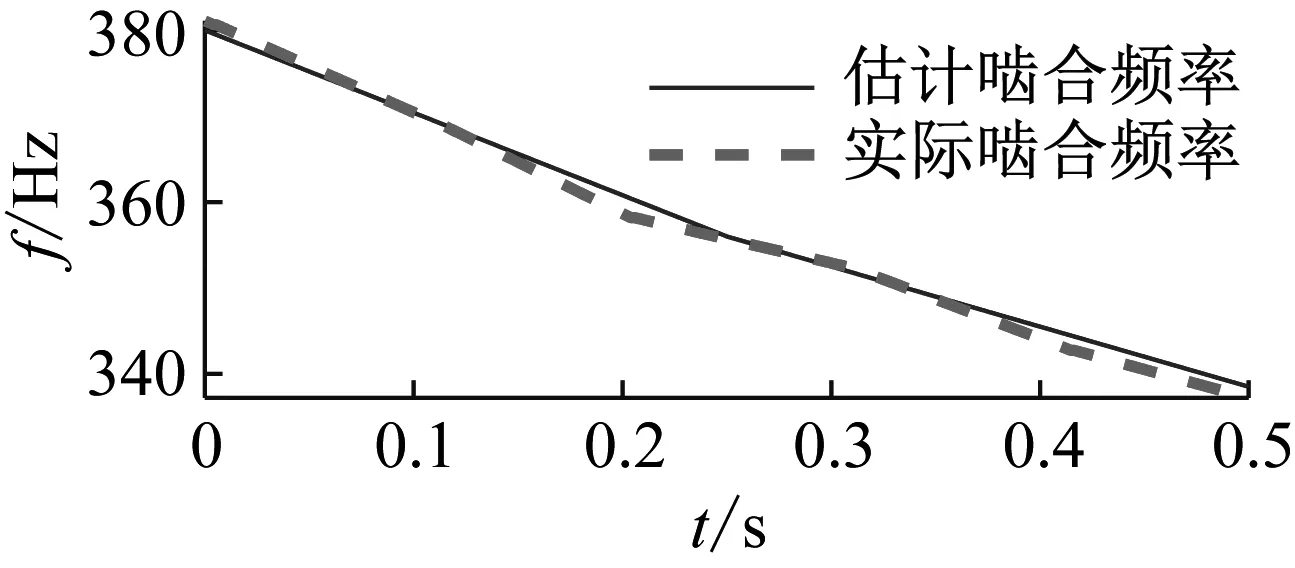
图9 实测信号下估计的啮合频率与实际啮合频率对比
根据估计的啮合频率曲线,采用本文方法对图8所示信号进行分析,阶次能量比K与半带宽的变化关系如图10所示。依据自适应带宽优化选取原则,计算可得最优半带宽约为4.2倍转频。

图10 实测信号下的阶次能量比
根据已获取的最优半带宽对齿轮故障振动信号进行自适应时变滤波分析,然后再进行阶次分析,得到的阶次谱如图11所示。从图11可知,在阶次36.93处出现明显峰值,与齿轮齿数37所对应;在边频阶次35.91、38.01处也存在较为明显的峰值,故通过该阶次谱可判断齿轮存在一定的局部故障。
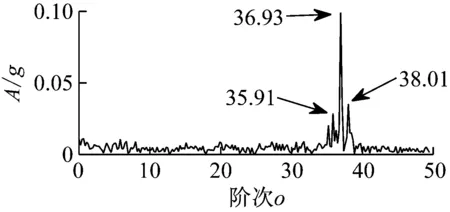
图11 实测信号下自适应选取带宽的阶次谱
同时,为对比经验带宽下的分析效果,分别采用1倍、5倍、7倍转频为半带宽对信号进行自适应时变滤波分析。若采用1倍转频为半带宽,其分析后的阶次谱如图12(a)所示。由于带宽过窄,其边频信号大部分被过滤掉,使得其边频阶次无明显幅值,容易导致误诊断。若采用5倍或7倍转频为半带宽,其分析后的阶次谱分别如图12(b)和图12(c)所示。虽然边频阶次存在较为明显的峰值,但随着滤波带宽变大,越来越多的噪声信号未被有效过滤,导致边频信号与噪声信号混合。
(a)1倍转频为半带宽
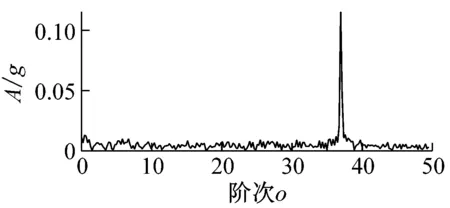
为增加与其他方法的对比,采用EEMD方法对图8中的齿轮故障信号进行分解,并对分解得到的包含故障信息的IMF3进行阶次谱分析。IMF3的时域波形如图13所示。从图13可知,存在一定的冲击成分,但周期性不明显。IMF3的阶次谱如图14所示。从图14可知,在阶次36.93处存在一定的峰值,该阶次与齿轮齿数37相对应,但其边频阶次不明显,且其他干扰阶次和噪声较多,不利于故障的识别与诊断。
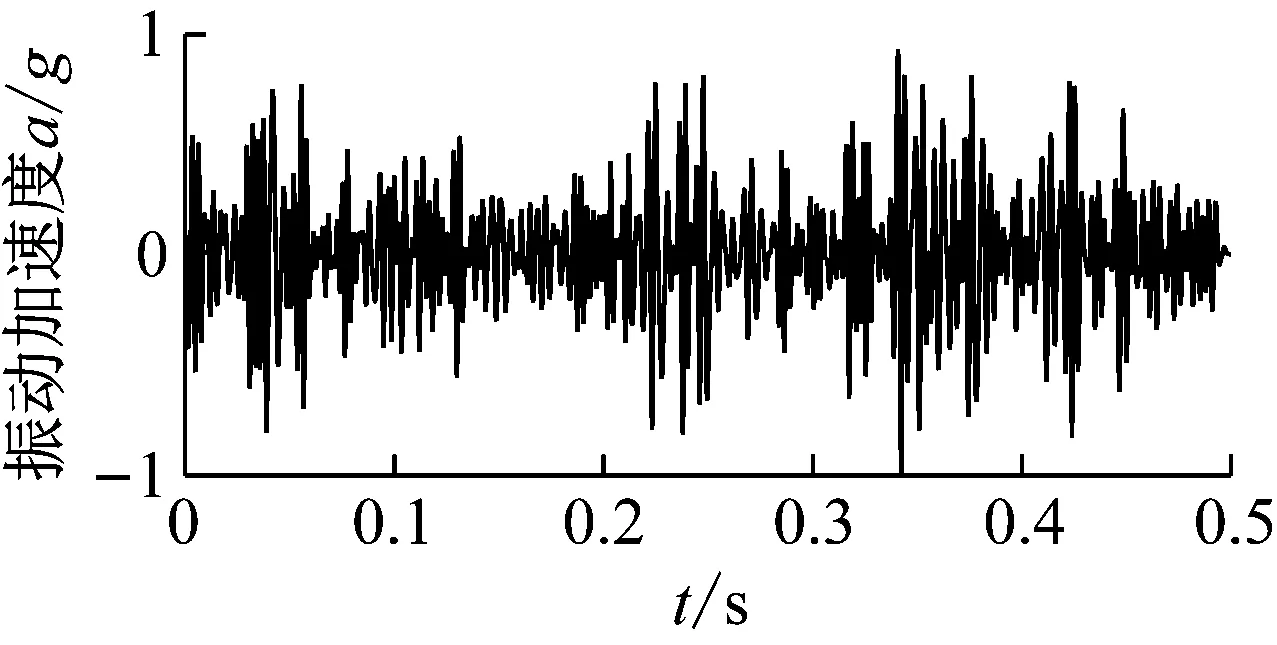
图13 IMF3的时域波形
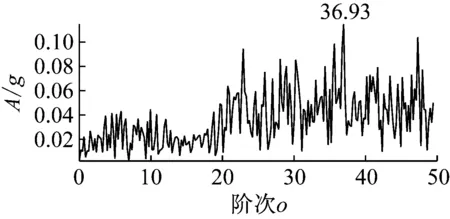
图14 IMF3阶次谱
5 结 论
针对ATF法中的自适应带宽选取问题,提出以边频带阶次与齿轮啮合阶次的能量比——阶次能量比K为指标,用于ATF法滤波带宽的自适应选取,并将带宽优化选取的ATF法用于变转速下的齿轮故障诊断。本文主要结论如下:
(1)ATF中通带的宽度将直接影响最终的滤波效果,信号的调制情况不同,所需要的滤波带宽也不相同。本文采用的阶次能量比K能有效分辨不同的倍频调制情况,从而可实现带宽的自适应优化选取。
(2)将带宽优化选取的ATF法用于变转速下的齿轮故障信号分离,并将分离有的信号成分进行阶次谱分析,分析结果表明,本文方法可有效凸显齿轮故障特征,提高分析精度。
(3)本文方法只选取了chebyshev滤波器作为原型滤波器,并利用阶次能量比作为指标研究了其带宽的自适应选取,而对于其他类型的滤波器(如Butterworth、Bessel)的滤波效果亦可作对比研究。
