基于图像处理的秧苗均匀度合格率检测
2022-05-16马立新夏利利刘璎瑛李芃萱朱伟
马立新 夏利利 刘璎瑛 李芃萱 朱伟








摘要:插秧机试验鉴定时要人工测定插秧前秧苗培育均匀度,为提高鉴定效率,本研究提出基于图像分割和形态学操作的秧苗均匀度合格率自动检测方法。首先将获取的秧苗根茎部图像在2G-R-B颜色空间进行灰度化处理,阈值分割后进行形态学操作,完成面积阈值和形状阈值的二次分割,得到只含有水稻秧苗的二值化图像;其次根据移距和秧苗深度确定取样方格大小,按方格大小进行图像划分,选取图像中间部分的20个小格,输出每小格内的秧苗数量,与农艺要求进行比对,符合要求记作该小格合格;最后根据DG/T 008-2019《农业机械推广鉴定大纲水稻插秧机》,计算3个不同苗盘图像的合格方格数,得到插秧前秧苗均匀度的合格率。结果表明,采用图像处理方法可以实现插秧前秧苗的均匀度合格率计算,秧苗统计的准确率可以达到97.95%,方格检测的准确度可以达到96.67%。处理每幅图像的平均耗时为2.461 s,大大提高了检测效率。
关键词:秧苗茎部图像;图像分割;形态学操作;均匀度检测
中图分类号:TP751;S511.01文献标识码:A文章编号:1000-4440(2022)02-0387-07
Seedling uniformity detection based on image processing
MA Li-xin XIA Li-li LIU Ying-ying LI Peng-xuan ZHU Wei
Abstract:The cultivation uniformity of seedlings before transplanting needs to be measured manually in the identification process of seedling transplanter. To improve the identification efficiency, an automatic detection method for the pass rate of seedling uniformity was proposed based on image segmentation and morphological operation. Firstly, images of the seedling roots and stems were processed using graying method in 2G-R-B color space, and were processed by morphological operations after threshold segmentation by Otsu method. Binary images containing rice seedlings only were obtained after secondary division of the area threshold and shape threshold. Secondly, sizes of the sampling squares were determined by shift distance and seedling depth, then the images were divided into squares by the size. After selecting 20 small grids in the middle part of the images, the number of seedlings in each small grid was output and compared with agricultural requirements, and the confirmed small grid was recorded as qualified. Lastly, based on DG/T 008-2019 <Outlines for agricultural machinery popularization identification: rice transplanter>, number of the qualified squares from images of three different seedling plates were counted, and the pass rate of seedling uniformity before transplanting was calculated. The results showed that, the pass rate of seedling uniformity could be calculated before transplanting by image processing methods, the statistic accuracy of seedlings could reach 97.95%, and the accuracy of the grid detection could reach 96.67%. The average time for processing each image took 2.461 s, which improved the detection efficiency greatly.
Key words:image of seedling stems;image segmentation;morphological operation;uniformity detection
江蘇农业学报2022年第38卷第2期
马立新等:基于图像处理的秧苗均匀度合格率检测
随着中国农业机械化自主生产能力的提升和农业机械化国产化进程的推进,农业机械的鉴定工作也从推广鉴定发展到专项鉴定,进入了规范化管理阶段[1-3]。根据国家标准水稻插秧机的鉴定大纲[4-5],插秧机在性能鉴定中需要在插秧前进行秧苗均匀度合格率、空格率和秧苗密度测定。插前均匀度合格率是评价盘育秧苗能否用于插秧的重要指标,也是评价插秧机作业性能的重要指标。它考虑了秧苗对插秧作业质量的影响,反映出插秧机的设计性能和制造质量。国家标准规定,插秧机进行鉴定时插前秧苗均匀度合格率测试值要大于或等于85%。
作为插秧机鉴定考核的重要作业技术指标,插前秧苗均匀度合格率检测是鉴定过程中需要开展的必要工作。目前的测定方法是目测统计,目测统计前需要人工制作取样框,对取样框里每个小格内的秧苗数量进行统计和记录,最后手动计算均匀度合格率。人工目测方式检测时间长,检测结果易受主观因素影响,不利于规范化、标准化管理。因此本研究采用基于图像处理的秧苗识别计数方法,可自动计算出均匀度合格率,大大简化检测的步骤,提高检测效率,消除检测的主观影响,便于鉴定工作的规范化管理。
1材料与方法
1.1秧苗培育
插秧前秧苗盘选用30 cm×60 cm大小的毯式苗盘,秧苗品种为淮粳5号,人工育秧,苗龄20 d。参照水稻插秧机的鉴定大纲,人工剪掉秧苗根部以上的茎叶。剪后剩余的茎部高度尽量保持一致,便于统计秧苗的数量。
1.2图像获取
图片在鉴定现场实地拍摄,自然光照条件,用手机在固定高度(35 cm)拍摄,手机型号为iPhone XS,拍摄焦距为26 mm。图像大小为3 024像素(宽)×4 032像素(高)。现场共制备3盘秧苗盘(图1),拍摄9幅图片。
插秧机鉴定试验地点在江苏省镇江市京口区章村。按照插秧农艺要求(每穴4株)进行插秧机移距和取秧深度的调整。经过调整,插秧机的移距为13.7 mm,取秧深度为16.0 mm,根据这2个参数确定取样框大小。人工统计方法是按照农艺要求制备取样框(图2),将取样框放置在制备好的秧苗上面,统计每个小格内的秧苗数量(图3)。每个秧苗盘取样后,人工统计出每个小格的秧苗数,记录并拍摄取样框选取的秧苗图像。
2秧苗茎部图像处理算法
2.1秧苗茎部图像分割
水稻秧苗为绿色植物,对秧苗图像的分割算法通常将颜色特征作为研究对象,大多采用红(R)、绿(G)、蓝(B) 3种颜色因子或者其组合因子进行灰度化转换,然后进行目标分割[6-8]。目前灰度化的方法有ExG[9]、ExR[10]、CIVE[11]和ExG-ExR[12]。目标分割算法主要有阈值分割算法[13-15]、聚类分割算法[16-17]和边缘分割算法[18]。典型的秧苗图像处理算法有张志斌等[19]提出的RGB法和迟德霞等[20]提出的ExG 因子结合 Otsu 法。RGB法使用 IG>IR 且IG>IB(IG、IR 、IB分别为通道G、R、B的灰度值)作为绿色作物图像的分割条件;采用ExG因子结合Otsu法将秧苗图像在2G-R-B灰度通道进行Otsu自动阈值分割,可以得到较好的分割效果。王雪等[21]针对室外多变光照条件下的绿色作物图像,采用G-R颜色因子,利用Otsu法和面积阈值进行分割,将其与RGB法和ExG+Otsu法进行比较,取得了较好的分割效果,算法有较强的鲁棒性和稳定性。
本研究需要分割的图像为秧苗茎部图像,茎部中央颜色比较淡,绿色特征没有秧苗叶片明显,根据图像分析设计算法:提取归一化后的ExG因子,对秧苗茎部图像进行灰度化,针对光照变化及不同的土壤背景均可获得较好得茎部图像信息。对秧苗茎部灰度图像进行Otsu法阈值分割,得到二值图像。对二值图像进行腐蚀、膨胀,将粘连目标分割开;提取目标特征,通过选取面积阈值和形状阈值将非目标物剔除,完成图像的二次分割。
2.1.1图像灰度化选用ExG因子进行图像灰度化。首先进行R、G、B像素值归一化,数值分别标记为r、g、b,范围在[0,1]内,计算方法如公式(1)所示。灰度化计算方法如公式(2)所示,数值范围为[0,1]。
式中,R:可见光红色通道值;G:可见光绿色通道值;B:可见光蓝色通道值;r:红色通道归一化值;g:绿色通道归一化值;b:蓝色通道归一化值;Gray:灰度值。
2.1.2图像二值化对秧苗茎部灰度图像进行阈值分割,计算方法见公式(3):
式中,BW:图像中像素点的值;T:图像最佳阈值。
T选取采用Otsu法[22], Otsu法是一种全局阈值自动选取方法,基本原理是以目标和背景的最大类间方差选取阈值。计算步骤如下:
(1)将秧苗茎部灰度图像的直方图进行归一化,相关公式:
式中,L:图像灰度级数,pi:像素值为i的像素点的概率。
(2)选择阈值t,0<t<L-1, 将图像阈值化处理为两类,C1和C2。C1由图像中灰度值在[0,t]内的所有像素组成,则像素被分到C1中的概率记为P1(t),像素的平均灰度记为m1(t);C2由圖像中灰度值在[t+1,L-1]内的所有像素组成,像素被分到C2 中的概率记为P2(t),像素的平均灰度记为m2(t); mG记为整幅图像的平均灰度;σ2B记为类间方差。类间方差计算公式如(5)所示。
(3)计算满足公式(6)的t为最佳阈值T。以T为阈值用公式(3)对秧苗图像进行分割,分割后图像如图4所示。
式中,σ2B:图像类间方差;P1:像素被分到C1中的概率;P2:像素被分到C2中的概率;m1:C1中像素的平均灰度;m2:C2中像素的平均灰度;mG:原图像的平均灰度。
2.1.3图像二次分割秧苗茎部如果靠得太近,在图像中会粘连在一起,导致后续个数统计中产生错误。另外分割后的图像中可能含秧苗叶片等非茎部图像,需要剔除。所以针对分割后的二值图像要进行去噪和粘连图像分割。本研究采用形态学开操作进行粘连图像分割,见公式(7)。
式中,A表示秧苗二值图像;B表示结构元;表示腐蚀操作;表示膨胀操作。
结构元形状和尺寸的确定既要考虑到粘连部分能够被腐蚀掉,又要考虑到保留较小的茎部目标,不被完全腐蚀,根据试验验证结果,本研究选取方形结构元,大小为15 pixel×15 pixel。
形态学操作后进行连通域标注,提取每个连通域的面积、外接矩形框的长轴和短轴,计算形状参数(长轴与短轴的比值)。连通域分秧苗茎部图像和非秧苗茎部图像,统计分析这2种图像的面积和形状,采用面积阈值和形状阈值进行非目标物的剔除。分析秧苗茎部图像的面积和形状,设置2个面积阈值,最小值为50 pixel2,最大值为4 000 pixel2;设置1个形状阈值,数值为4.2。利用面积阈值和形状阈值对形态学操作后的图像进行二次分割,处理后的图像如图5所示。
2.2取样方格划分
根据GB/T 6243-2017《水稻插秧机试验方法》[5],方格大小为移距×取秧深度。移距记为DM(单位:mm),取秧深度记为DP(单位:mm),如果相机的像素距离为K(单位:mm/pixel),则图像中方格宽(W)=DM/K(单位:pixel),方格高(H)=DP/K(单位:pixel)。
试验测定时利用实际取样框方格大小进行相机标定确定K值, 取样框方格实际长度与图像中方格像素长度的比值为K值,本研究的K=0.05(mm/pixel)。对秧苗茎部图像按方格大小的整数倍剪裁后进行方格自动划分,方格大小为W×H。
2.3秧苗均匀度合格率的计算
根据《农业机械推广鉴定大纲水稻插秧机(DG/T 008-2019)》[23],在鉴定过程中,秧苗插前均匀度合格率测定方法是从秧箱中取出3块已栽插三分之一的秧块进行测定,用取样框随机取60小格,测定每小格秧苗株数,按公式(8)计算插前均匀度合格率。
式中,Rjq:插前均匀度合格率;nkh:合格秧苗格数;Zk:测定总小格数。
利用图像处理方法可以不用取样框,3个秧苗盘每盘一幅图像,直接对秧苗茎部图像进行方格划分,每幅图像取20个方格,共计60个小格。统计每个小格内的秧苗数量,如果均匀度合格率范围符合要求(本研究中2~7株即为合格),则该小格为合格[5]。根据合格率公式计算出插秧前秧苗均匀度合格率。
3结果与分析
3.1秧苗茎部图像处理算法分析
为了对图像处理算法综合性能作一个较全面的评价,本研究从检测误差和检测时间2个方面进行分析。图像处理软件使用的是 MATLAB2019a,图像处理设备使用的是笔记本电脑。硬件参数: Intel(R) Core(TM) i5-10300H CPU,2.50 GHz,16 G 内存。误差的计算方法如公式(9)所示。对3个秧苗盘图像处理后,按方格大小在图像中间选取20个方格大小的图像进行秧苗个数识别计数,处理结果如表1所示。
式中,R:误差;Numa:算法识别数,株;Numr:人工识别数,株。
由表1可知,算法的平均误差为2.05%,检测的准确度为97.95%。算法对单幅图平均耗时2.461 s。由于拍摄的图像分辨率比较大,算法要对图像中的所有目标进行特征提取,根据面积阈值和形状阈值进行二次分割,所以算法耗时比较长。但与人工统计相比还是大大提高了检测效率。
3.2秧苗均勻度合格率算法检测识别结果与人工检测识别结果的比较
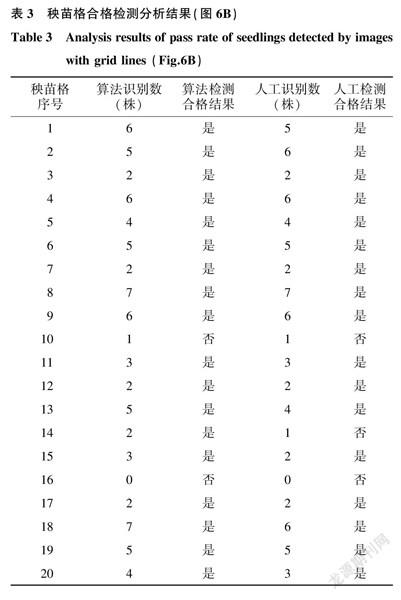
选取实地鉴定拍摄的取样框图像进行分割统计,与人工统计结果进行比较。实际取样框方格数为36个,选取20个进行人工检测,将人工检测的方格图拍照(图6)。2种方法的检测结果见表2、表3和表4。
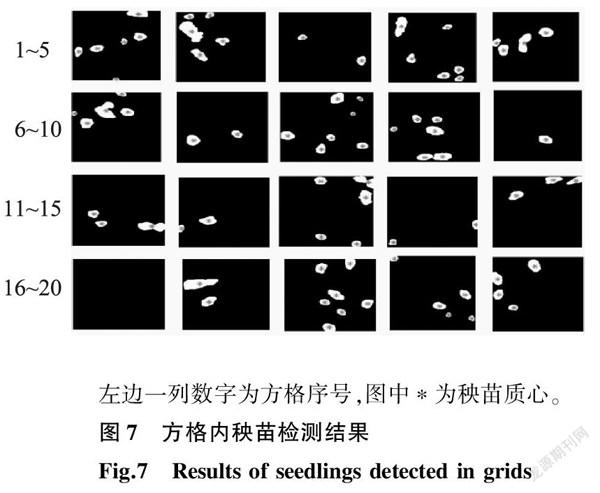
由表2、表3、表4可知,3盘秧苗共统计60个方格,人工检测合格方格数共计55格,合格率为91.67%,算法检测合格数共计55格,合格率也为91.67%。虽然2种方法检测的合格率相同,但均匀度合格率检测中算法检测和人工检测不一致的地方有2组。每个方格均匀度合格率的检测误差为3.33%,准确度为96.67%。图6B的20个方格分割结果如图7所示。对照表3中的秧苗识别结果,检测误差主要源于2个方面。一是取样框的白色线会将秧苗分割在3个方格内,人工统计的时候会拨动白线将其归到一个方格内,图像处理方法会在2个方格内都检测到秧苗,统计上出现重复;二是在秧苗制备过程中,剪掉的秧苗茎和叶片会落在方格内,人工检测时会拨动查看是否为散落的茎叶,图像处理方法在二次分割的时候会通过面积阈值和形状阈值加以剔除,但如果散落的茎、叶的大小、面积和形状刚好跟根部图像一致,系统则会将它们误判为秧苗。
4结论
本研究对插秧前秧苗的均匀度合格率进行了图像检测,首先根据颜色因子将采集的图像转换到2G-R-B颜色通道实现灰度化,应用Otsu自动阈值分割方法得到二值图像;对二值图像进行形态学操作和面积阈值及形状阈值二次分割,将粘连的秧苗分开,去掉非秧苗目标等噪声。由取秧深度和移距确定取样方格大小,按方格尺度对二值图像进行自动划分,对划分后的图像块进行秧苗数量统计,代替人工采用取样框法进行方格内秧苗数量的统计。试验结果表明,秧苗茎部图像分割统计算法的准确率为97.95%,单幅图像平均耗时2.461 s,每个方格合格率的检测准确度为96.67%,合格率的检测完全可以用图像处理代替人工检测。在秧苗剪切过程中掉落的秧苗茎叶会对图像处理结果造成影响,下一步将进行图像处理检测算法的改进,提高检测精度,并将处理算法移植到手机,做成APP,使鉴定过程更方便。
参考文献:
[1]崔志英. 水稻插秧机研究现状及发展趋势[J].农业工程,2015,5(4):41-42.
[2]张树阁,苏春华,周磊,等. 促进水稻种植机械化水平提高[J].农机科技推广,2017(10):19-20.
[3]韩峰. 水稻机械化插秧技术分析与种植机械发展趋势[J].农业开发与装备, 2019(5):208-212.
[4]李春元. 对水稻插秧机主要项目测定与数据处理的探讨[J].农机论坛,2016(6):15-16.
[5]中华人民共和国国家质量监督检验检疫总局、中国国家标准化管理委员会.中华人民共和国国家标准水稻插秧机试验方法:GB/T 6243-2017[S].北京:中国标准出版社.
[6]廖娟,陈民慧,汪鹞,等. 基于双重 Gamma 校正的秧苗图像增强算法[J].江苏农业学报,2020,36(6): 1411-1418.
[7]陈旭君,王承祥,朱德泉,等. 基于YOLO卷积神经网络的水稻秧苗行线检测[J].江苏农业学报,2020,36(4):930-935.
[8]陈信新. 基于机器视觉算法的水稻秧苗状态识别[J].计算机应用研究,2019,36(5):2-5.
[9]WOEBBECKE D M, MEYE G E, BARGEN K V, et al. Shape features of identifying yong weeds using image analysis[J].Transactions on American Society of Agricultural Engineering,1995,38(1):271-281.
[10]MEYE G E, HINDMAN T W, LAKSMI K. Machine vision detection parameters for plants species identification[C]. Bellingham, WA:SPIE,1999.
[11]NETO J C, MAYER G E. Crop species identification using machine vison of compute extracted individual leaves[J]. Proc Spie,2005,5996(11):64-74.
[12]KATAOKA T, KANEKO T, OKAMOTO H, et al. Crop growth estimation system using machine vision[C]. Piscataway,NJ:IEEE,2003.
[13]龚立雄. 基于ComVI和双阈值OTSU算法的农作物图像识别[J]. 排灌机械工程学报,2014,32(4):364-368.
[14]ELAZIZ M A, OLIVAD, EWEES A A,et al. Multi-level thresholding based grey scale image segmentation using multi-objective multiverse optimizer[J]. Expert Systems with Applications,2019,125:1-37.
[15]袁加红,朱德泉,孙丙宇,等.基于机器视觉的水稻秧苗图像分割[J]. 浙江农业学报,2016,28(6):1069-1075.
[16]周俊,王明军,邵乔林. 农田图像绿色植物自适应分割方法[J]. 农业工程学报, 2013,29(18):163-169.
[17]白元明,孔令成,张志华,等.基于改进 OTSU 算法的快速作物图像分割[J].江苏农业科学,2019,47(24):231-236.
[18]耿楠,于偉,宁纪锋.基于水平集和先验信息的农业图像分割方法[J].农业机械学报,2011,42(9):167-172.
[19]张志斌,罗锡文,臧英,等. 基于颜色特征的绿色作物图像分割算法[J]. 农业工程学报, 2011, 27(7):183-189.
[20]迟德霞,张伟,王洋. 基于EXG因子的水稻秧苗图像分割[J]. 安徽农业科学, 2012, 40(36):17902-17903.
[21]王雪,尹来武,郭鑫鑫. 室外多变光照条件下农田绿色作物的图像分割方法[J]. 吉林大学学报(理学版),2018,56(5):1213-1218.
[22]OTSU N .A Threshold selection method from gray-level histograms[J]. IEEE Transaction System,Man and Cybenetics,1979, 9(1):62-66.
[23]中华人民共和国农业农村部:农业机械推广鉴定大纲-水稻插秧机:DG/T 008-2019[S]. 北京:中国农业出版社.
(责任编辑:陈海霞)
收稿日期:2021-08-10
基金项目:江苏省现代农机装备与技术示范推广项目(NJ2019-25)
作者简介:马立新(1966-),男,江苏溧阳人,研究员,主要从事农业机械试验鉴定工作。(E-mail)njmlxin@126.com
通讯作者:刘璎瑛,(E-mail)lyy@njau.edu.cn
