一种防止多任务碰撞的空间吊装冲突估计仿真
2022-05-14倪小磊
倪小磊,刁 璇,盛 娟
(东南大学成贤学院,江苏 南京 210088)
1 引言
近年来,随着我国社会的高速发展,全国大部分城市都在建造大型的建筑工程。装配式建筑因其能够大幅度缩短工期、降低成本、减少建筑垃圾的优点受到人们的欢迎。然而装配式建筑的施工现场环境极为复杂,如何对施工现场的空间资源进行高效地分配成为人们探讨的热门问题[1]。由于使用的大型吊装设备较多,因此在有限的作业空间里合理调配作业现场的资源就变得尤为重要。预先对施工现场的大型吊装设备进行多维的冲突识别成为建筑施工的关键环节[2]。
李振豪[3]等人提出基于坐标投影的装配式建筑作业空间冲突识别方法。该方法首先利用Split法提取建筑的等高线特征点,并以此为基础构建局部坐标系;再利用矢量坐标投影对建筑的整体进行分析,从而完成对装配式建筑作业空间的冲突识别。该方法由于未能对吊装多维作业空间中的冲突量化指标进行设定,因此导致该方法在对吊装作业空间进行多目标冲突识别时的识别效果差。韩晓军[4]等人提出基于模型分割的装配式建筑作业空间冲突识别方法。该方法首先依据模型的分割算法,对建筑结构进行适当标记;再依据椭圆包围盒算法对拟合建筑的分割区域进行计算;最后通过计算结果完成对装配式建筑作业空间的冲突识别。该方法由于未能设定吊装多维作业空间中的冲突体积,在噪声介入的环境下,无法精确地识别吊装多维作业空间的冲突,导致该方法的抗干扰能力差。卢江[5]等人提出基于观察坐标的装配式建筑作业空间冲突识别方法。该方法首先基于观察坐标法明确各大型装备之间的位置;再建立对应关系函数,通过对关联函数的计算完成对装配式建筑作业空间的冲突识别。该方法由于未能设定作业空间中的冲突比例与冲突时间,该方法所识别出的冲突不全面,施工作业空间的覆盖性能低。
为解决上述装配式建筑作业空间冲突识别时存在的问题,提出装配式建筑吊装多维作业空间多目标冲突识别方法。
2 吊装多维空间
利用计算机仿真技术对装配式建筑多维作业空间中的冲突类型进行识别,并设定冲突量化指标对不同冲突类型的严重性评价。
2.1 冲突类型
将装配式建筑吊装多维作业空间中大型吊装设备所需要的作业空间进行整合,并依据施工现场所有工作资源,对作业空间进行划分。空间可划分为效率、实体、安全三种,划分的具体关系,如图1所示[6]。
依据图1可知,吊装多维作业空间中安全与实体空间组合在一起为作业现场的操作空间。实体空间是由机械尺寸大小所决定的;安全空间则要确定现场所有建筑资源的安全,是其中最小的空间;机械和施工人员高效运作的空间为效率空间。空间中可能出现的各类冲突类型如下:
1)实体冲突
实体冲突为两个或多个实体空间之间发生的叠加现象。实体冲突的出现,表示施工现场出现了安全事故(或机械故障受损或人员伤亡),最终会导致装配式建筑施工现场无法继续作业[7]。
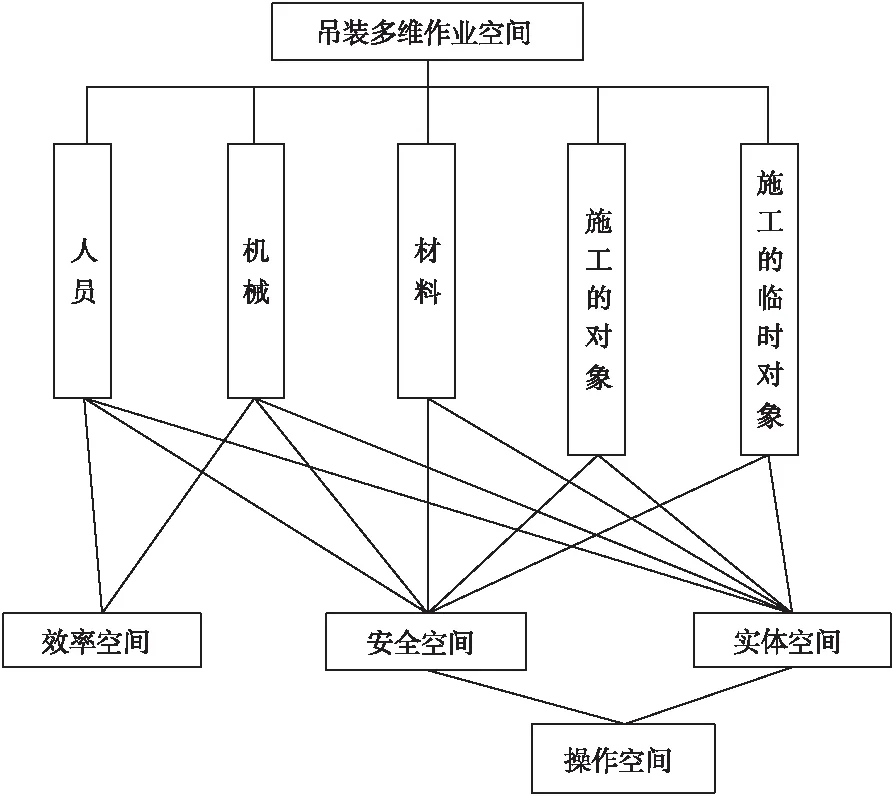
图1 施工现场具体空间划分图
2)实体与操作冲突
实体与操作冲突是机械空间与实体空间互相叠加造成的现象。这种现象发生时,安全空间会因为实体空间的增大而减小,因此极易引发安全事故,从而导致施工效率受到影响。
3)操作冲突
操作冲突为两个或多个操作空间发生的叠加现象。该现象发生时会影响整个装配式建筑的吊装进程,极个别情况下还会出现事故,带来资源的浪费。
2.1 冲突量化指标
冲突发生后,事故大小与叠加空间的叠加时间、叠加体积相关。假设装配式建筑的整体工程吊装时长为(ts,tf),i,j分别为吊装设备。s和f分别为工期的开始时间与结束时间,A为吊装所用的空间,相关量化指标如表1所示[8]。

表1 作业空间多目标冲突量化指标
2.3 吊装多维作业空间的冲突严重性评价
对装配式建筑吊装多维作业空间进行冲突结果的严重性评价时,要对叠加空间的大小、类型进行评价。再在评价结果中加入调节因子,修正冲突结果,从而保证其评价的准确性。
对于在吊装多维作业空间中存在的冲突,评价指标Iij由下式进行获取
Iij=h(kiSuiSti+kjSujStj)
(1)
式中,h为加入的调节因子,吊装设备i,j的权重分别为ki,kj。
由于装配式建筑施工过程的冲突重要性与危机程度与调节因子的权重相关,因此要将权重调节因子的取值区域控制在[0.5,1]中,并将其作为吊装作业的最大权值。通常情况下,若叠加区域为发生冲突,可知Ac=Sui=Suj=0,Iij=0。若叠加区域发生冲突,冲突中调节因子又持续增大的情况下,就可以通过计算获取冲突的严重性指标。
3 冲突识别
将冲突量化指标与BIM技术相结合,构建装配式建筑结构的多维可视化施工模型。通过模型实现装配式建筑吊装多维作业空间的多目标冲突识别。
3.1 模型构建
将上述设定的冲突量化指标与BIM技术结合,构建装配式建筑结构的四维可视化施工模型。装配式建筑结构四维可视化施工模拟的实现,需要将施工现场的施工计划、施工进度与构建的模型相连接[9]。因此,要以装配式建筑施工进度中的时间信息为基础,制定模型中预制构件装配时间表,以此调整施工过程中的施工顺序。在三维模型的施工环境中进行四维的建筑结构动态演示。
在装配式建筑四维可视化的施工模拟过程中,施工现场实体空间的数据中隐藏着时间特性,因此需要利用BIM技术对装配式建筑中的建筑结构数据进行采集,采集过程中需要对预制构件的类型、材质、做工、厚度等数据属性进行分类。
依据分类结果,确定构建装配式建筑结构的思维可视化施工模型所需要的数据信息,结合设定的冲突量化指标对模型进行构建,构建过程如下式所示
S(t)=p(x,y,z,t)*n
(2)
式中,S为装配式建筑结构的实体外观数据,t为施工过程中的时间变量,P(x,y,z)为模型中第i个数据特征的三维坐标点,坐标值为x,y,z,n为装配式建筑结构的外观特征点数量。
依据所构建模型,结合施工需求,将模型进行拆分,并按照内容将数据划分到相应的子模型中。
3.3 冲突识别的实现
利用构建的模型完成装配式建筑吊装多维工作空间的多目标冲突的识别[10]。在对装配式建筑吊装多维作业空间多目标冲突识别前,需要分析建筑结构的实体数据特征。首先设定装配式建筑施工过程中施工场地不会因个别因素发生变形,将构建的模型变换为一个可以根据时间变换的齐次坐标变换矩阵,过程如下式所示:

(3)
式中,模型中的施工进程数据信息阶越函数用A表示,且该矩阵不具备连续性。
依据模型的变换矩阵对装配式建筑吊装多维作业空间的多目标冲突进行识别。将装配式建筑结构实体空间分为上、中、下三个部分,并将其中的大型吊装设备分为b和d两个部分,通过对二者进行计算实现对吊装多维作业空间的多目标冲突识别,过程如下式所示
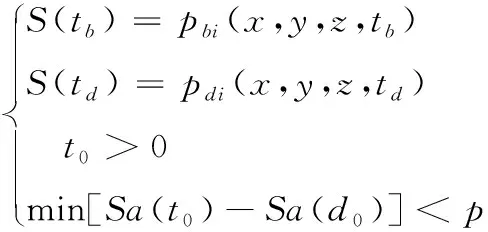
(4)
式中,p表示实体空间中判断时间的安全阈值,S(tb),S(td)分别为实体空间中不同设备的体积大小,pbi,pdi分别为不同吊装设备的数据信息,而min[Sa(t0)-Sa(d0)]则是两个设备之间的最小距离。通过t0的大小确定空间中是否存在冲突,以此完成吊装多维作业空间内中层及上层的冲突识别。
由于吊装多维作业空间中的下层空间数据信息较为复杂,因此要对装配式建筑的吊装多维空间进行中点面距离的设定,对空间底部可能存在的冲突进行识别[11]。在吊装空间中设定一个任意的三维坐标点q和一个三角形组成的平面w,并将其二者之间的距离设为|q,w|,结合平面的法向量对|q,w|存在的几种情况进行说明。二者之间的点面距离示意图如图3所示。
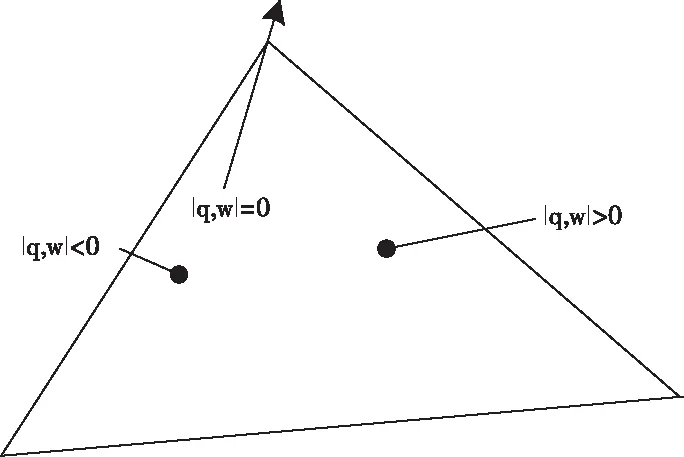
图2 为三维坐标点与平面的点面距离示意图
第一种情况当|q,w|=0时,吊装作业空间的三维坐标点与三角形在同一平面内;第二种情况当|q,w|<0,坐标点与法向量不处于同一位置,坐标点与平面的距离要根据绝对值来决定;第三种情况当|q,w|>0时,空间的三维坐标点与法向量处于同一位置,二者之间的距离同样取决于绝对值的大小。依据上述三种情况对作业空间的数据信息进行分类,完成装配式建筑吊装多维空间的底层冲突识别[12]。
依照上述原理完成对装配式建筑吊装多维作业空间多目标冲突识别。
4 实验结果及分析
为验证上述方法的整体有效性,需要对此方法进行测试。
分别采用所提的装配式建筑吊装多维作业空间多目标冲突识别方法(方法1)、文献[4]提出的基于模型分割的装配式建筑作业空间冲突识别方法(方法2)、文献[5]提出的基于观察坐标的装配式建筑作业空间冲突识别方法(方法3)进行测试:
4.1 不同方法的冲突识别效果对比
在方法1、方法2以及方法3中加入安全、成本、时间以及资源4个约束条件对吊装作业空间的冲突进行识别,识别结果如表2所示。
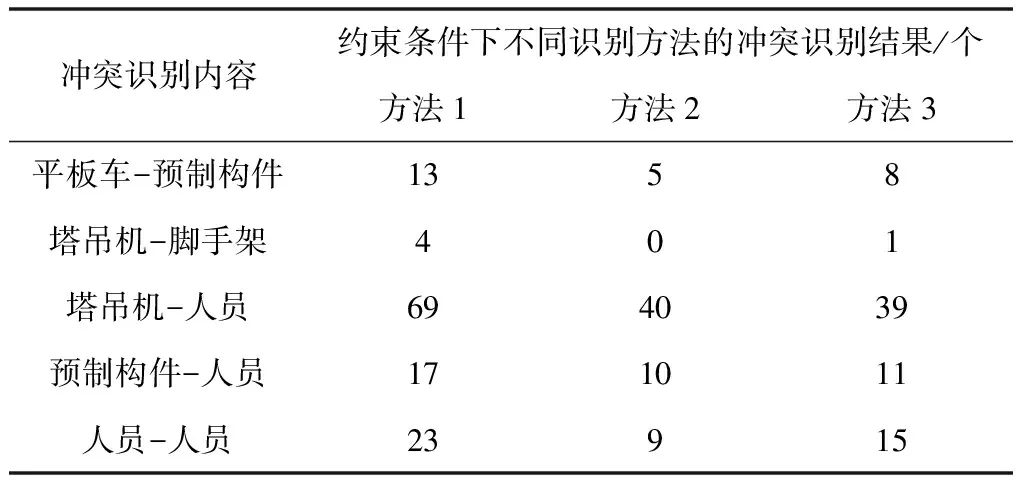
表2 三种方法在约束条件下的冲突识别检测结果
依据表2可知,在约束条件下方法1的识别效果要优于方法2以及方法3,并且能够发现在吊装作业空间中塔吊机械与人员之间的冲突最为频繁。这主要是因为方法1在对吊装空间进行冲突识别前,采用计算机仿真技术设定了吊装多维作业空间中的冲突量化指标,因此该方法在识别作业空间的冲突时能够增加冲突的识别个数,提高识别的效果。
4.2 不同方法的抗干扰能力对比
在方法1、方法2以及方法3中加入一组噪声,测试不同的识别方法在有噪声干扰的情况下的抗干扰能力,测试结果如表3所示。
依据表3可知,在噪声介入的情况下方法1的抗干扰能力要优于方法2以及方法3,并且能够将误报个数与漏报个数控制在5个以内,这主要是因为方法1对吊装多维空间的冲突体积进行了设定,因此该方法在噪声介入的情况下依然能够精准的识别出多维作业空间的多目标冲突。因此该方法的抗干扰能力好。
4.3 不同方法的覆盖性能对比
利用操作系统构建一个冲突类型复杂且冲突较多的装配式建筑空间,对不同方法在装配式建筑空间的覆盖性能进行测试,测试结果如表4所示。

表4 不同方法的覆盖性能测试结果
依据表3可知,方法1施工现场的覆盖性能高于方法2和方法3,并且能将施工现场的平均覆盖率维持在99.05%。这主要是因为方法1对吊装多维作业空间的冲突比例、冲突时间进行了设定,因此该方法所识别出的吊装作业空间的冲突较为全面,施工作业空间的覆盖性能好。
5 结束语
针对传统方法在空间识别时存在的问题,提出装配式建筑吊装多维作业空间多目标冲突识别方法。该方法首先利用计算机仿真技术识别作业空间的冲突类型,并设定冲突量化指标对冲突类型进行评价;再基于BIM技术构建思维可视化施工模型;最后通过对模型矩阵的计算,完成装配式建筑多维作业空间多目标冲突的识别。从而完成装配式建筑吊装多维作业空间多目标冲突识别。由于该方法在构建模型时还存在一定缺陷,因此今后会针对这一问题继续对该识别方法进行优化。