变电站无人机巡检障碍物状态量化准确性评价
2022-05-14朱泽锋胡金磊温佳静
朱泽锋,胡金磊 ,温佳静
(1. 广东电网有限责任公司清远供电局,广东 清远 511500;2. 武汉大学电气与自动化学院,湖北 武汉 430072)
1 引言
中国电网在新一轮能源革命下将进一步丰富和扩展[1],电网规模也依然处于快速增长中[2]。当前电网全要素生产率总体上处于较高水平[3],而智能电网的快速发展也让传统人工巡检方式越来越难以适应工作需要[4]。
变电站巡检为设备检修提供有力的数据支持,检修常见的方式包括故障检修、定期检修以及状态检修[5]。随着电力信息数据采集趋于完善,基于大数据的电力设备运行及健康状态评估日臻准确[6],由此对设备开展差异化检修也成为可能[7]。
在变电站中为提高巡检效率通常会应用多台机器人,而为了弥补机器人巡检的盲点,采用无人机巡检可以更加灵活、全面的采集数据,实现变电站巡检无人化[8]。
在变电站中可以采用机器人与无人机协同开展无人化巡检,为提高巡检的效率,需要对现场的数据开展即时分析,从而提高巡检的效率与质量。从人的认知角度出发,障碍物状态量化准确性评价是态势感知SA(State Awareness)的典型应用,可分成核心态势感知和影响态势感知的要素两部分。核心态势感知包括数据和环境因素提取、对当前态势的理解、对未来态势的预测、决策以及行动措施等[9]。高杨团队对无人机集群态势感知进行了深入的探索。文献[10]利用态势感知模型给出同构无人机集群SA 的一致性形成过程,异构无人机集群 SA 的一致性判断方法和无人机集群 SA 评价方法的选择流程。
无人值守变电站中依然可能存在与预先观察和设置数据不一致的情况,例如:人员或动物入侵,物件的摆放位置出现变动。这些障碍物对无人机飞行造成安全隐患。与现有单一依靠无人机采集的数据进行避障有差别的是,基于变电站摄像头、机器人及无人机的多源数据采集,采用边缘计算EC(Edge Computing)框架,对障碍物的大小、位置、评估精度等状态判断更加精确,基于一致性分析,可以对障碍物的状态开展量化评估与分析,由此,为无人机的安全避障飞行提供保障。
2 障碍物状态量化准确性评估系统
2.1 系统EC架构及实现
无人机、机器人与摄像头在变电站内安全开展协同巡检,数据采集和分析的量较大,云计算是目前在变电站集控式管理中应用最为广泛的技术,EC从其技术起源上就与云计算有着密切的关系,减少了云计算的响应延迟,减轻网络传输负担。Agent技术虽然也有与云计算结合的[11],但并没有与云计算的计算与分析过程深度结合,只是完成云计算相关的任务模块,属于松耦合。
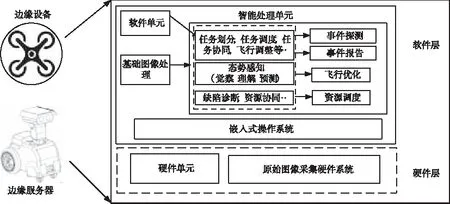
图1 变电站协同巡检EC框架
变电站的边缘计算中心节点通常位于集控中心,不在本文研究范围内。机器人由于续航时间长,可以携带的存储及计算资源所受限制较少,因此,在边缘计算中承担边缘服务器的职责。无人机集群行动方便灵活,也可以克服单个无人机续航能力不足带来的困扰,单个无人机承担边缘设备的作用。
在变电站中使用无人机集群与机器人开展协同巡检,行进过程中,根据任务的需要以及机器人的当前位置, 根据任务的完成与推进与不同的机器人协同完成所需任务。由此,在某一个特定时刻协同巡检是一个标准的EC框架,但随着时间的推进,EC框架中参与的边缘服务器、边缘设备都可能发生变化,是一个动态EC框架。
变电站中的一次巡检任务中通常包括多个子任务,由于无人机飞行的速度有限,也可以对子任务之间的间隔时间进行调整,由此,子任务之间的时间间隙是最优的EC框架动态调整时机。当然,无人机电量不足必须返航,机器人的运行位置切换也是需要考虑的因素,可以通过任务启动前的提前规划,尽量避免子任务执行过程中参与EC的节点切换。
2.2 技术难点分析
变电站无人化值守经过多年的实施已经基本普及,机器人巡检也初步得到应用。目前变电站机器人巡检多采用履带式或轮式,运行速度较慢,所以通常在一个变电站中需要采用多台机器人同时开展巡检工作。
由于机器人在地面运行,视角会受到限制,当前有采用升降杆调整摄像头的高低和角度,但出于运行安全的考虑,调整范围受到限制。无人机由于其飞行速度快,较少受到限制,因此,在变电站中与机器人协同,可以在很大程度上代替人工巡检,向无人化巡检的方向推进。协同巡检有以下主要技术难点:
1)多种数据采集:变电站巡检中,常见需要搜集的数据包括可见光图片及红外数据。无人机由于搭载负荷的能力有限,采用多台无人机搭载不同的负荷开展协同巡检非常必要。
2)数据采集同步:在一些情况下,需要机器人与无人机对同一设备的不同部位进行同步的采样,这也需要无人机与机器人协同。
3)数据共享:单一机器人或无人机在运行过程中,需要对环境数据进行感知、决策,决策的内容可以共享,例如:如果机器人分析出前方障碍物的高度,可以将相关信息分享给无人机,由此无人机不需要对图像数据进行分析,直接决策是否需要绕飞。
摄像头的数据在目前变电站中应用还比较有限,集中在安监、数据读取等方面。将摄像头、机器人数据与无人机数据融合,可以对障碍物的状态更好的量化评估,而通过一致性分析方法,可以将无效的数据从中剔除,从而以高质量数据为依据评估,准确性更高。
3 量化评估一致性分析方法
3.1 评估模型
在经典的SA三级模型[12]中,在一定的时间和空间约束条件下,通过对环境元素的感知,理解,实现预测。参与协同的个体实现“感知-调整-决策-执行”(OODA)环,但显然信息存在不完整、不确定性。军用无人机集群运行时需要从完备性、准确性、连续性、时效性、相关性及准确度这六个方面评估协同态势的觉察一致性。
与现有面向区域覆盖以及特定目标识别和攻击的需求不同,变电站覆盖范围不大,边界非常明确,但对于飞行控制的精度要求非常高,对于场所中的人、装备、设备的检测要求比较高。由此,量化准确性评估的模型也需要有所调整,如图2红色部分所示,需要对无人机,机器人以及变电站现有固定摄像头的数据进行有效融合才能进一步通过机器学习方法对障碍物进行有效判断,从而为巡检线路的优化提供支撑,为安全飞行提供保障。
变电站无人化巡检过程中,由于飞行线路已经提前进行了设计,所需采集的图像数据非常确定,而变电站设备自身并不会移动,因此,从飞行安全角度考虑,重点需要感知在变电站中不属于自身所有的人、物以及设备,可以定义为待感知障碍物(SO,Sensed Obstacle),可以主要分为两类:
1)计划障碍物:变电站中根据操作需要动作的设备,或者是参与巡检的设备。示例包括参与巡检的装备,如工具箱,机器人,无人机等。
2)例外障碍物:变电站巡检过程中出现的其它对象,例如:遗留的设备和工具,入侵的动物或人。
3.2 指标体系
假定某巡检任务,无人机需要巡检K台设备,当前巡检第k台设备,设定为巡检的第k个步骤,当前的时刻为j。当前步骤k中有M1台无人机,M2台机器人,M3个摄像头,共M个物联网设备。
针对变电站协同巡检的需求,定义以下主要评价指标。
1)完整性指标:主要用于描述完整反应所有SO态势特征的程度。

(1)
显然,完整度指数越高,能获得更多的态势特征结果,综合分析可以避免出现误判的情况。
2)均匀性指标:主要用于描述从全方位描述对象态势状态的程度。
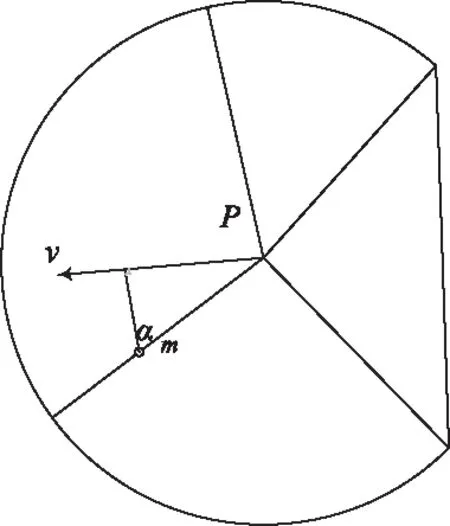
图3 均匀性指标
如图3所示,圆心代表SO,右边的缺口表示由于变电站的区域限制,不允许部署物联网的区域,圆弧表示可以部署的区域,半径可以根据需要设置,可设置为50米,而红色圆弧部分表示实际部署的部分。
对于m点检测到的态势特征S(m,l,k,tj,i),通过连接SO点P与物联网检测设备,可以将态势数据投影到对应的圆弧上,并统计对应的概率分布函数f(S(l,k,tj,i)),对应的数学期望为E(l,k,tj),由此,将分布函数的均方差定义为均匀度Ev(l,k,tj)。
均匀性指标越好,可以更全面,准确的分析处于运动状态的SO的速度,避免由于视差导致的数据分析错误。
3)m点准确性指标:目标特性与SO的特征一致程度。
若SO点P在感知后的状态为Pt(S(m,l,tj,i)),真实状态为Pr(m,l,tj,i)。则有准确性指标
(2)
∃/Pt∈∅
3.3 基于EC的数据融合
在巡检过程中,待感知对象的行动路线,速度都有可能发生变化,随机性较强,比如:动物或人的入侵。因此,基于曲线拟合或者支持向量机这样的算法难以应用于对象位置的预测。用感知代替预测,可以更为真实的反应SO的当前状态,无人机也可以据此更为安全的规划避障路径。
在变电站的EC框架下,物联网终端摄像头具备一定的图像分析能力,无人机为提高续航能力,以数据和图像的采集为主,而机器人的电量充足,计算功能强,可以作为边缘服务器使用。
显然,对于对象移动的判断,如图3所示,当监测的物联网终端与SO运动方向垂直时,判断速度与方向最准确,当物联网终端在运动方向上时,就很难判断对象的运动状态。
设置重要性指标为
(3)
则对应的SO准确性指标可以进一步得到
(4)
3.4 多目标障碍物状态一致性量化算法
3.4.1 目标跟踪相空间描述
在变电站中,动态目标的危险程度高,静态目标如果位于危险区域,其危险程度也高。显然在变电站中需要具备对多个目标跟踪的能力。
考虑到无人机在变电站中的飞行速度,每5秒钟对数据开展一次分析,每个目标的SA数据进行跟踪,有:
SA(l,k,tj)=[Com(l,k,tj),Ev(l,k,tj),Ps(l,k,tj)]T
(5)
由此,针对特定目标l,有跟踪的序列相空间描述为S(l)={SA(l,k,t1),…,SA(l,k,tj),…}。
对指标进行去均值化处理,有:

(6)
其中E(SA)为指标的数学期望。
3.4.2 决策矩阵
进一步对该序列进行非线性处理

(7)
由于指标的均匀性对于指标的有效性具有重要的作用,由此,指标的权重设置为

(8)
(9)
由此,针对SA的l,设定区间决策矩阵为:

(10)

3.4.3 一致性计算
集群态势觉察一致性
(11)
进一步得到可能度公式
Pi,j=P(hi≥hj)

(12)
变电站巡检中,态势感知所应用的数据来源包括无人机、机器人以及摄像头三个集群,由此,得到区间数相对大小为
(13)
区间数相对大小可以用于评价一致性差异。
4 仿真分析
4.1 仿真设定
广东清远供电局某110kV变电站采用无人化巡检方案。采用1台无人机,4台机器人开展移动式巡检。某巡检任务需要对4台设备开展巡检,即巡检划分为4个步骤,每个巡检步骤中可以参与边缘计算的设备数量为。
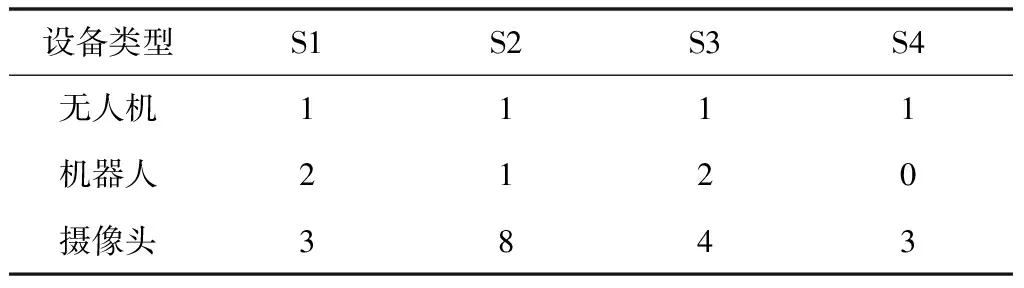
表1 边缘计算设备
在每个阶段,都设置4个障碍物,分别是行人、人字梯、工具箱,分别差异化设置。显然,本算法具有相当的灵活度与弹性,参与边缘计算的无人机数量,机器人数量以及摄像头数量可以根据现场计算结果灵活调整,不需要预先进行人工参数设置,这符合变电站巡检的实际工作情况。
4.2 实验结果及分析
基于边缘计算的情况下,数据源的选取可以非常灵活。在给定巡检任务下,无人机的飞行路径较为固定,因此,参与边缘计算的摄像头可以与无人机执行的任务绑定。本文根据获取的数据,分别按照以下三种方式的数据源组合进行计算并对结果进行对比:无人机数据(R1组合);无人机及摄像头数据(R2组合);无人机、机器人及摄像头数据(R3组合)。
针对单一任务,选取20次飞行的数据均值作为计算依据,计算得到的结果见表2,其中的序号1,2,3分别对应R1组合,R2组合以及R3组合。以理论分析状态与实际状态的参数比值为评价标准评估量化结果。
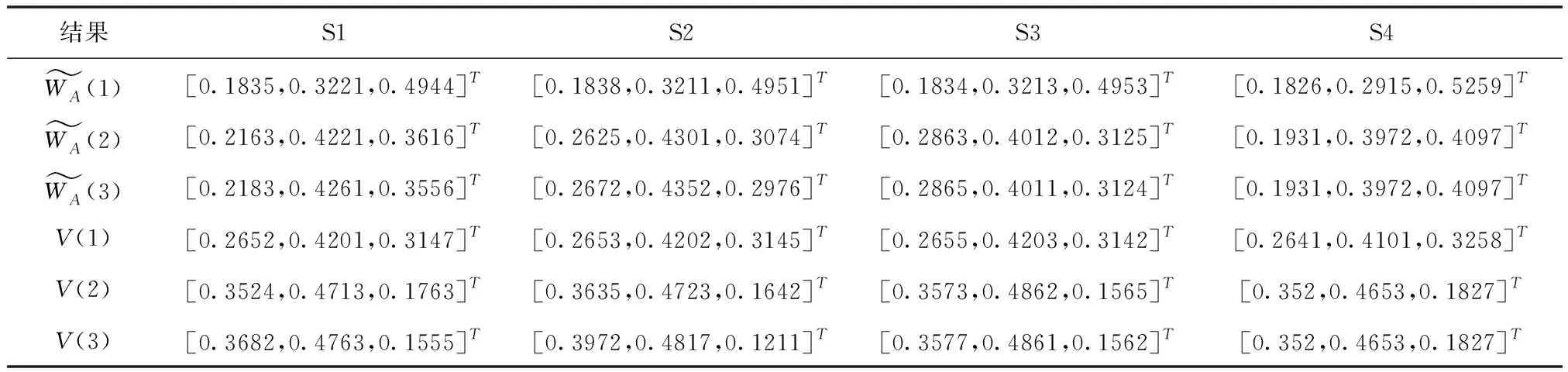
表2 权重及区间数相对大小计算结果
1)单纯应用无人机的数据进行分析,对无人机数据的准确性要求越高,否则对安全性影响较大。
2)将物联网摄像头数据与无人机数据结合后,对障碍物的障碍物状态量化评估准确性提高比较大。
1)单纯应用无人机数据在变电站内导航,风险较大,而采用物联网数据后,障碍物状态量化评估的准确性大幅度提高,可以保障无人机安全飞行。
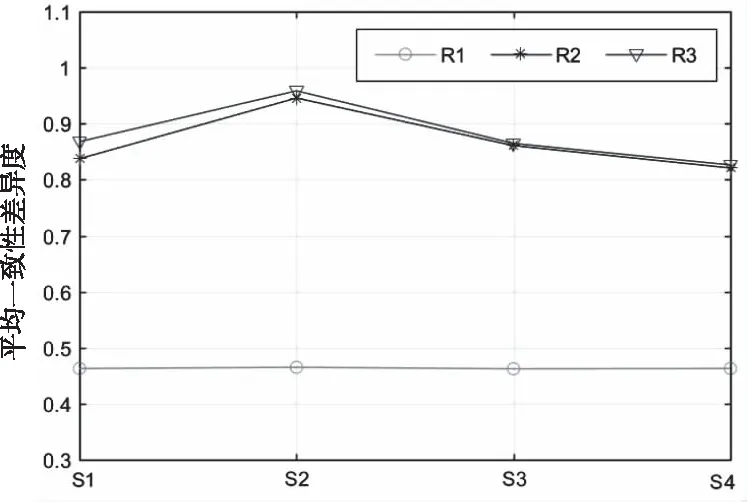
图4 平均一致性差异度
2)参与协同分析的物联网终端越多,障碍物状态量化评估的分析结果越准确。
3)同等条件下,均匀性指标越高,分析结果越准确。
4)机器人由于数量较少,如果所处位置不佳,在前述基础上提升障碍物状态量化评估的准确性效果与摄像头相差不大(见S3)。但如果机器人的位置比较理想,则有可能大幅度提升障碍物状态量化评估的准确性(见S2)。
在对变电站现场障碍物的位置,数量进行调整后,可以得到类似的结果。
5 结论
无人化运维是工业运维的未来趋势,是物联网、边缘计算、人工智能、机器人、无人机等方面的交叉学科。本文以变电站无人化巡检为研究对象,以无人机为巡检发起的,构建包括无人机、机器人以及固定摄像头在内的边缘计算框架,对变电站内巡检任务相关的SO进行SA分析。文章提出了计算框架,数据融合框架,指标体系以及对应的指标分析方法。通过不同的数据组合测试,在现有变电站中对提出的分析方法进行了验证,证明了所提出方法的有效性。
下一步基于态势感知的结果,进一步协调机器人、无人机在巡检过程中的巡检线路配合,在本文数据融合协同的基础上实现空地巡检过程的协同。