基于数字孪生的智能产品模块管控交互仿真
2022-05-14李肇坤孙宇晖
刘 洋, 李肇坤,孙宇晖,杨 昂
(1. 大连海事大学航运经济与管理学院,辽宁 大连 116026;2. 大连海事大学航运发展研究院,辽宁 大连 116026;3. 南澳大学,阿德莱德 澳大利亚 5001)
1 引言
随着智能产品不断走入人们的生活,对产品的需求逐渐转化为对“智能化”的需求。实际上,将“智能化”应用在产品模块中一直都是科学研究的目标[1]。智能产品主要特点为:感知性、适应性、优化性和信息交互性,正因为智能产品具有的市场潜力,吸引了大量的学者与企业投入进来。但随着应用场景愈来愈严苛的需求变化,对智能产品的研发也提出了众多新要求。智能产品需要进行数据收集、数据解析、数据预测和数据分发等一系列流程[2],因此亟待寻找一种能够有效适用于智能产品模块化的研究方法,来提高智能产品模块的管控质量。
文献[3]以产品模块的特性为出发点,对智能化产品的组成模块进行划分,通过数字孪生对智能产品的模块功能进行表述,并对已有的模块进行改进,实现对智能产品的全面分析,该方法可以很好的展现智能产品的信息域及物理域特征,但需进一步完善智能产品的设计体系。文献[4]分别对产品的可视化管控需求和框架进行分析与研究,在此基础上构建并设计可视化管控的模型与规则,该方法具有合理性与有效性,但不具备产品的预测评估能力。文献[5]通过对产品管控数字孪生模型的构建,引入工作流技术从而完成对数据的采集与管理工作,集成灰色马尔可夫预测模型和关联规则算法,分析预测产品模块的质量数据,该方法可以大大提高监控覆盖率,但状态同步延时时间较长。
基于以上研究,针对智能产品模块的管控交互问题,本文提出数字孪生模型及其同步方法。利用自回归滑动模型对智能产品模块进行匹配,采用增加有色噪声模型的方法,提高模型的管控精度。通过智能产品模块的输入与运动过程中反馈的数据建立平稳时间序列,实现数字孪生模型与实际模型参数的同步更新、在线优化与实时调整。
2 智能产品分析
2.1 特性分析
智能产品模块具有两种特性,即物理域和信息域,正因为物理域和信息域的结合,智能产品模块才具备一定的智能化特性,才得以实现对用户与环境的自适应性。智能产品模块的自适应性依靠成熟的软件操作系统,操作系统可根据产品模块的输入以及环境因素等进行推理并作出智能反应。
本文将智能产品模块分为5个模块:感知、交互、推理、存储和执行模块。各个模块具有各自的功能及输出对象,模块之间的相互关系如图1所示。
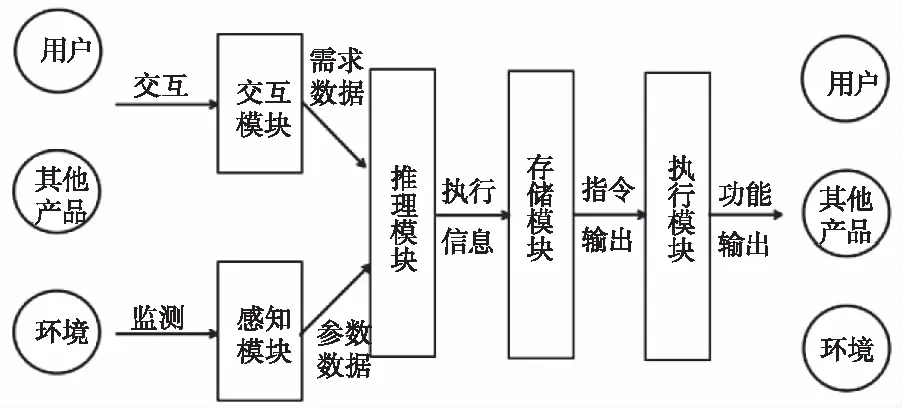
图1 智能产品模块间的相互关系
其中,交互模块起到获取用户、其它智能产品及环境信息的作用;感知模块起到获取自身状态信息及环境信息的作用;推理模块起到数据分析研究,并针对信息的处理结果提出有效信息的作用;存储模块起到存储物理域与信息域相关参数的作用;执行模块起到执行指令,实现对数据输出的作用。智能产品各个模块间的交互作用主要依靠于相互配合的物理域与信息域。因此,为了保证智能产品交互的准确性,需要同时考虑物理域和信息域。
2.2 系统分析
作为智能产品模块管控交互的设计,针对智能产品模块特点,大量学者提出了一系列的系统分析方法:Cena等[6]从目的、结构和功能等方面对智能产品进行分析,其中包含了对智能产品交互特性及技术系统现状等方面的分析,有利于与其它智能产品进行对比。Hernandez[7]将智能产品的性能按核心与辅助两个方向进行划分,由于清晰的划分层次,设计者可以很轻松地通过产品的性能把握产品的技术现状。上述方法均可以帮助设计者进一步了解智能产品的概念与结构,但这些方法主要倾向于对信息域的研究,导致设计者对智能产品模块的分析不够准确,限制了设计者对智能系统有效信息的获取,进一步导致信息-物理域闭环反馈的构建不完整。智能产品的管控功能主要依赖于各个模块之间的交互作用,但模块间的交互关系很难界定,因此需要进一步找到适合描述智能产品模块信息-物理域关系的方法,而数字孪生是对智能产品模块概念与结构进行分析的最恰当方法。
3 模块单元管控设计
3.1 管控指标体系设计
对智能产品模块管控需要设计合理的管控指标体系,体系的科学与合理性直接影响到智能产品管控的全面与真实性。本文采用公理化设计理论对智能产品管控指标体系进行构建,这些指标在产品模块工作管控及交互优化等方面发挥着重要作用。
采集产品模块工作数据是智能产品孪生模型实施管控交互的重要内容,本文设计了一个基于智能产品工作状态数据的模型用于整理智能产品收集数据的关系结构,如图2所示。
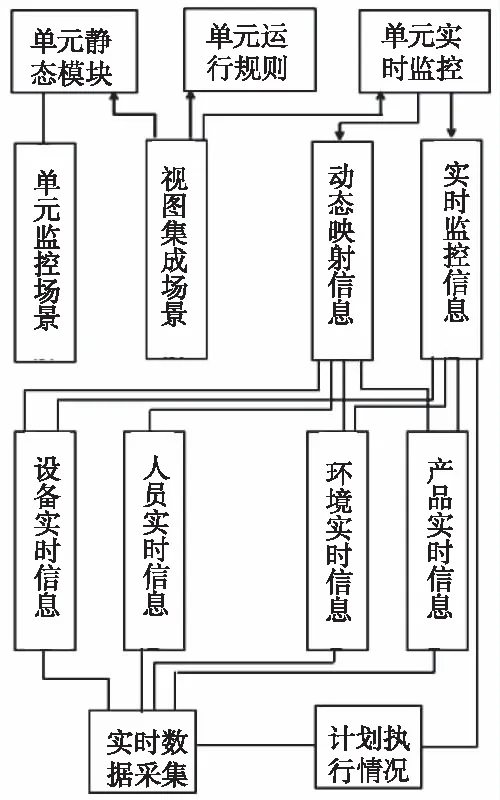
图2 智能产品实时数据模型
整个智能产品实时数据模型主要分为孪生体模型数据和单元工作实时数据两部分。孪生体模型数据由单元静态模块、单元运行规则和单元实时监控数据组成。单元工作实时数据是智能产品数据模块的核心驱动力,基于数据采集和数据传输获得设备、人员、环境和产品的实时数据,并对采集的大量数据进行筛选、分析,为孪生体模型的智能产品模块管控交互提供数据源。
3.2 可视化实时管控
为了保证智能产品物理域中人、产品和环境等系统各个信息均可以被实时采集到,本节采用自动识别技术对模块单元进行识别。它不仅可以标识物理资源,还能实时更新存储的数据。通过自动识别技术对智能模块资源进行标识和采集后,需通过通信技术进一步实现智能模块的虚实映射过程,虚实映射架构如图3所示。
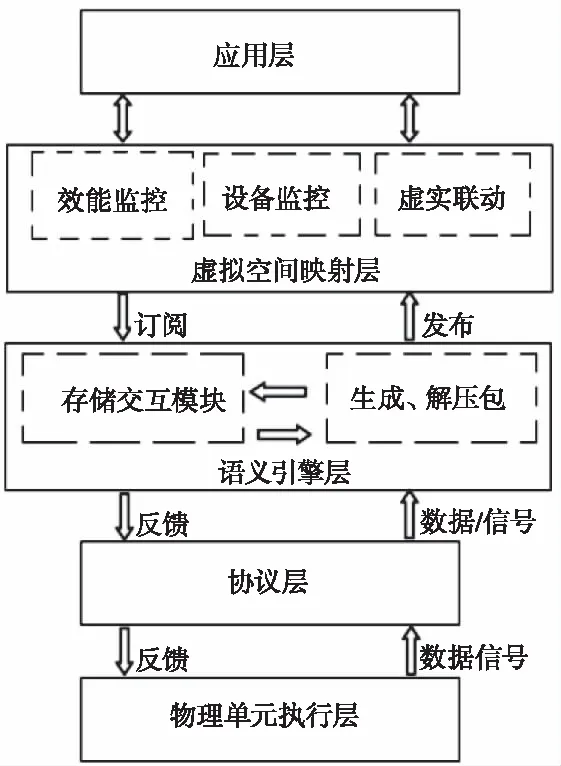
图3 模块虚实映射架构
在物理单元执行层中,主要采用自动识别技术感知模块单元参数,并对参数进行采集。传感技术主要是对智能产品管控过程中的设备状态、运行参数进行转换和传输,将信号转换成数字量和模拟量,其中数字量可作为驱动信号,通过中间变量与数字孪生平台进行通信。模拟量则通过通信协议与中间变量完成双向传递的工作,并将分析后的数据、特征等按照语义标准进行存储。语义引擎层主要负责编码数据,虚拟空间层向语义引擎层发送订阅命令,引擎会根据已有的交互协议对数据包进行压缩,同时将压缩的数据发布到虚拟空间上进行解析处理,实现底层数据的应用。
4 数字孪生体模型构建
为了实现对智能产品的虚拟映射,本节采用数字孪生模型及其同步的方法。利用自回归滑动模型对智能产品模块进行匹配,同时为了对没有建模的动态特征进行描述,采用增加有色噪声模型的方法,提高模型的管控精度。进一步采用递推增广最小二乘法实现智能产品模块数据的同步与更新。
在系统的实际工作过程中,可通过智能产品模块的输入与运动过程中反馈的数据建立平稳时间序列,进而描述智能模块的完整模型。智能产品模块的数学孪生模型用有色噪声项自回归滑动模型可表示为
A(p-1)x(q)=p-aB(p-1)u(q)+C(p-1)δ(q)
(1)
其中
A(p-1)=1+a1p-1+a2p-2+…+amap-ma
B(p-1)=b0+b1p-1+b2p-2+…+bmbp-mb
C(p-1)=1+c1p-1+c2p-2+…+cmcp-mc
(2)
智能产品模块的增广模型可通过白噪声δ(q)的有色模型进行描述,公式可表示为
e(q)=C(p-1)δ(q)
(3)
进而数学孪生模型用公式可表示为
x(q)=-a1x(q-1)-…-amax(q-ma)+
b0u(q-f)+…+bmbu(q-f-mb)+e(q)
(4)
首先对智能产品运行过程中所产生的摩擦力进行线性化处理,将其转化为关于速度的线性函数,公式可表示为
(5)
其中,v+(υ)表示正向速度;v-(υ)表示反向速度。进而智能产品的动力学方程可表示为

(6)
其中,J表示等效惯量;VIN表示输入电压;Tdist表示扰动力矩。那么智能产品在实际工作过程中的传递函数可表示为

(7)
综上所述,可得出智能产品在工作过程中包含摩擦力矩的速度预差分方程,表示为
(8)
通过离散化处理将智能产品动力学模型转换为自回归平滑模型,实现对智能产品模块的数学孪生模型描述。然而数字孪生模型容易受到环境的影响,且其参数极易退化,为了使数字孪生模型更加精准,本文采用递推增广最小二乘算法,对数字孪生模型进行优化,使数字孪生模型模拟的动态响应与实际测量的瞬态响应误差最小。
为了达到数字孪生模型参数同步更新的目的,需要对递推状态量进行构建,通过递推增广最小二乘法,实现智能产品集成总参数的自适应更新迭代过程,公式表示为
υ1(q)=-a1υ(q-1)+b0u(q-1)
(9)
其中
(10)
通过数据交互和同步算法,可实现数字孪生模型与实际模型参数的同步更新,辅助智能产品管控过程中的在线优化与实时调整。
5 仿真与结果分析
为了验证基于数字孪生智能产品模块管控交互的有效性,将智能产品模块开发平台部署在服务器上,验证数据在交互时智能产品模块优化后的管控情况。
系统接收到管理信息系统传输的信息后,根据产品的质量和数量将任务集合传递给数字孪生模型,并将任务需求传递给功能模块,智能产品根据自身能力做出决策,并将决策反馈给数字孪生模型,用户根据逻辑运行仿真验证智能产品是否满足需求,从而实现数字孪生模型、物理空间和数据库的相互交互。
根据管控交互场景,本文基于智能产品的数据模型,对管控场景中相关资源进行模型实际化。在实验过程中改变智能产品携带质量块的数量,验证数字孪生模型参数同步和控制方法的有效性及优越性,本文主要在智能产品不携带质量块和携带质量块的情况下,对数字孪生模型同步精度和速度阶跃响应特性两方面内容进行测试。通过实际系统的速度与智能产品模块控制器的输出信号,完成对数字孪生模型参数的更新迭代,智能产品在不/带质量块情况下数据的同步结果如表1所示。
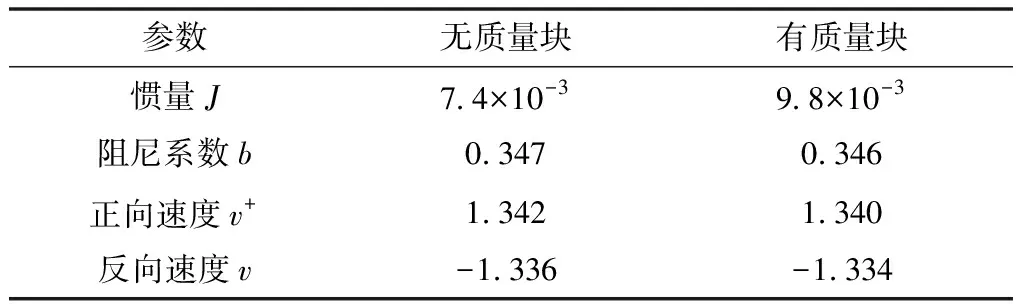
表1 数字孪生模型数据同步结果
从表中可以看出,采用本文提出的方法可以准确检测出惯量的变化情况,而阻尼系数、正向速度和反向速度变化不大,说明智能系统的摩擦特性没有明显变化,证明数字孪生模型数据同步方法具有一定的收敛性与有效性。为了进一步验证智能产品模块在惯量扰动情况下的阶跃响应情况,将本文提出的方法与传统方法进行对比,分别验证智能产品在不/带质量块情况下的系统阶跃响应情况,阶跃响应曲线如图4所示。
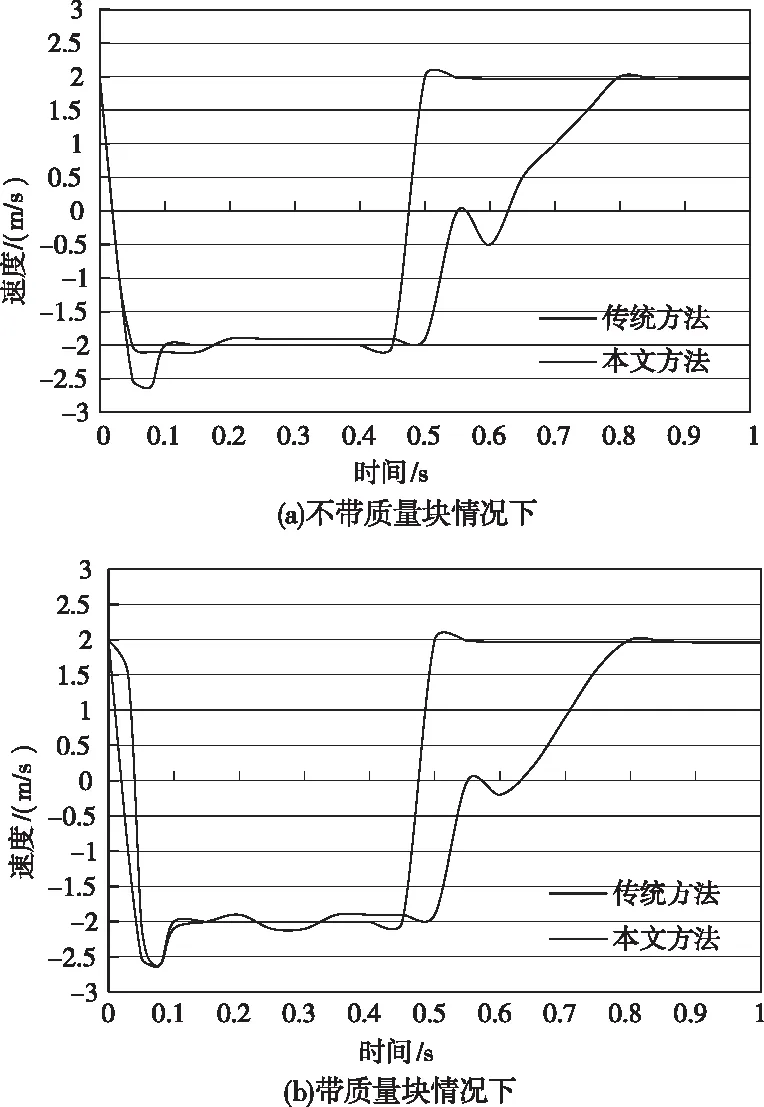
图4 阶跃响应曲线
从图中可以看出,采用本文算法在不/带质量块的情况下,系统调整时间均小于0.1s,满足指标要求,且阶跃响应曲线可以与设计的阶跃响应曲线进行很好地拟合。而采用传统方法在不带质量块的情况下,系统的调整时间大约为0.2s,若带质量块调整效果更差,难以满足指标要求。
6 结束语
对于智能产品管控交互问题,本文提出一种基于数字孪生模型,依据公理化理论设计数字孪生单元的管控指标体系,通过虚实同步技术构建智能产品模块的可视化实时管控模型,并利用自回归滑动模型对智能产品模块进行匹配,采用递推增广最小二乘法实现智能产品模块数据的同步与更新。为了验证基于数字孪生智能产品模块管控交互的有效性,将资源结构模型进行实例化处理,根据数字孪生体模型构建智能产品模块的管控系统,并对模型和系统进行仿真验证。实验结果表明,采用本文方法可以对惯量的变化进行准确地检测,且其它特性参数变化量也很小,在不/带质量块的情况下系统的调整时间均小于0.1s,验证了数字孪生体模型控制策略的有效性。