床边下肢康复机器人结构设计与仿真分析*
2022-05-12罗承开韦建军王春宝刘铨权
罗承开,韦建军※,王春宝,,刘铨权
(1.广西科技大学机械与交通工程学院,广西柳州 545000;2.深圳市老年医学研究所,广东深圳 518000)
0 引言
随着我国老龄人口的增加,老龄化所引起的一系列问题也越发尖锐。我国每年脑卒中导致偏瘫患者新增200万,由于治疗师短缺,大部分的脑卒中患者早期未得到有效的治疗,使得患者的病情加剧,严重影响他们的生活[1]。脑卒中早期的患者由于卧床不便移动,而康复黄金期为脑卒中病发后的前3个月,所以早期介入和患者的主动参与对于患者的康复和后续的治疗起到非常好的效果。治疗师进行传统床边康复训练时,每次进行的手法与力度不相同,患者主动参与率低,且对于患者治疗效果的评估很大程度上依赖治疗师的临床判断和主观经验,对病人的当前恢复现状没有得到及时和准确的判断,使得治疗师无法针对患者的康复现状确定科学的治疗周期。
脑卒中对于大脑以及肢体的影响如图1所示,由于大脑受损,患者的一侧肢体丧失运动能力,而另一侧则正常[2-3]。反复肢体运动训练是促进神经环路再生重组及加强突触间联系的有效途径之一[4]。

图1 卒中影响区域
日本筑波大学的Atsushi Tsukahara[5]研制的robot suit HAL能够帮助完全截瘫患者实现下肢的坐-站转换以达到康复训练效果,能适应患者的各个康复期。意大利Rimec公司研制的Fisiotek下肢被动运动训练器通过滑块的往复运动来带动人体下肢作屈伸运动,达到康复训练的目的。吉林大学刘坤等[6]研制的悬吊式下肢康复装置用于辅助患者的站起康复训练,能够帮助患者实现站立训练。泽普医疗的智能主被动床旁下肢康复机专为卧床患者下肢康复而设计,采用可移动的康复终端理念,实现床边下肢康复的可能。具有被动、助力、主动、主被动、痉挛缓解等训练模式。综上所述,目前的康复机器人大多适用于具有一定站立能力或站立能力的患者,很少有卧床患者相应的下肢训练装置,且主动参与率低。也无法对患者进行阻抗训练和进行信息采集及时优化训练过程。
针对现有训练装置的不足,旨在解决卧床患者难以得到有效训练、训练精度低等问题。本文提出了一种床边下肢康复机器人,如图2所示,采用等长二连杆机构,实现患者在床边特定区域的水平往返运动。在连杆上安装同步带轮,实现由单个电机带动多个自由度的方式。该机器人结构简单、能适应不同身高的患者,并提供多种训练模式,能实时采集患者训练数据及时优化。

图2 总体方案
1 设计要求
人体下肢是由髋关节、膝关节、踝关节以及大腿、小腿和足组成[7-8],人体下肢的运动即为骨骼绕着相应的关节转动。如图3所示。

图3 人体下肢模型
患者康复训练时,人体下肢各个关节的角度在变化,患者康复训练时下肢关节的角度变化范围应该在关节运动范围之内,否则在康复训练时会造成损伤。人体下肢髋关节、膝关节、踝关节在矢状面的运动角度如表1所示[9]。

表1 人体下肢各关节活动范围
由于人体的差异,因此在设计时应再考虑到患者的腿部的具体参数。根据GB 10000—88中给出我国成年人下肢参数。康复机器人涉及参数如表2所示。

表2 人体下肢相关参数
由百分位数可知,中国男性成年人的身高位于1 678~1 754 mm的人数最多,达到40%。为提高其适用性和基于机构运动可靠性考虑,现在选取身高为1 754 mm的患者,即大腿长度为496 mm、小腿长度为396 mm作为相应机构尺寸设计参考。
2 机构设计
2.1 确定方案
研究表明,腿部的屈伸以及伴随着的踝关节与髋关节的运动,可以提高静脉回血压力[10],加速患者腿部功能的康复,使僵硬的腿部肌肉变得灵活[11]。总体方案如图4所示。

图4 机构总体方案
传动机构的方案设计如图5所示,原动件运动方向如图中箭头所示,采用传动比为i=-1的传动方式,即同步带轮Ⅰ、Ⅱ、Ⅲ、Ⅳ的齿数满足如下关系式:
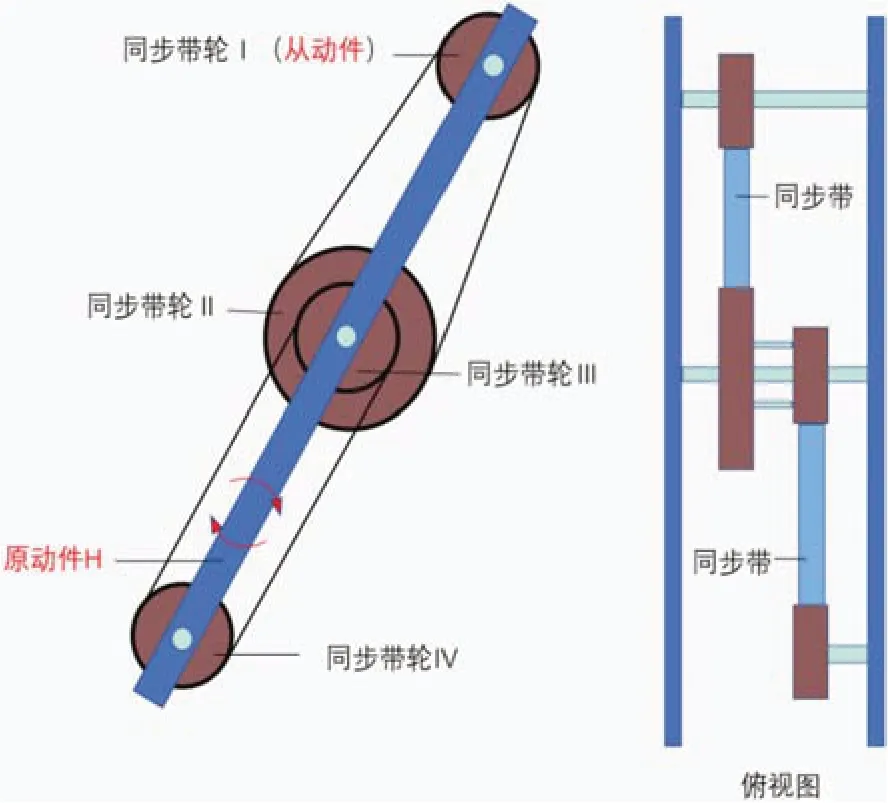
图5 传动机构方案

2.2 确定结构尺寸
康复训练结构简图(单侧)如图6所示,小腿的长度LCD=396 mm,大腿的长度LDF=496 mm,当训练处于屈膝极限状态时,膝关节活动的最小角度β=35°。

图6 康复训练结构简图
由余弦定理有:

当训练处于伸膝极限状态时,β=180°,此时LCF=892 mm,在伸膝与屈膝状态下LCF的差值等于606 mm。设初始角度β=60°,故训练时要达到膝关节的极限位置,则转动臂的设计尺寸不应小于606 mm。此时机构执行末端在水平方向上的位移为606 mm。将转动臂的尺寸L设计为606 mm。在实际的康复训练中,很少对膝关节的极限位置进行训练,即伸膝极限状态的训练,可适当调节初始角度β的角度值,即可实现在膝关节运动范围内的任意角度的训练。
2.3 总体结构设计
床边下肢康复机器人总体设计如图7所示。主要由小车、升降柱、丝杠调节组件和相同的左、右训练机构组成。此设计能使患者通过左训练机构和右训练机构对患者下肢进行康复训练,而且还能够根据设置在脚踏板上的压力传感器采集到的受力状况,及时优化训练过程。进行康复训练时,由治疗师推动该机器人置于病床床尾处与病床固定,并将患者的足部置于脚踏板上由绑带绑紧。

图7 下肢康复机器人总体结构
该下肢康复机器人具有主动、被动两种训练模式,可根据下肢肌力的大小选择不同的训练模式[12],脑卒中前期的患者,下肢大多没有运动能力,需进行被动训练,由电机驱动转动臂转动带动患者下肢运动。康复训练中后期,下肢的运动能力有所恢复,可采取主动训练,通过患者下肢肌力克服电机阻力运动,达到训练的目的。也可以采取健患侧结合训练。
康复机器人(单侧)具有3个自由度:电机驱动使得脚踏板沿X轴水平方向的往返运动,实现患者的伸屈膝训练;摇动手轮可沿着Y轴水平方向运动,可调节距离以适应患者不同宽度的骨盆,且对于脑卒中早期不宜移动的卧床患者,也可适当的调节距离使其能在正确的位置做康复训练;升降柱可沿着Z轴竖直方向升高或降低,可用于患者康复后期加大对髋关节的训练力度和适当地调整患者足部的高度。
2.4 转动臂设计
在康复训练过程中,为了避免转动臂之间产生干涉,将靠近床一端的转动臂设计成L型,其三维模型如图8(a)所示,L型转动臂的两端分别与U型转动臂和脚踏板连接。转动臂之间可相对旋转。

图8 转动臂总体设计
在与L型转动臂连接的另一端设计有U型转动臂,在U型槽内安装有同步带轮。U型转动臂的一端与固定座连接,可绕着固定座做回转运动。当电机驱动U型转动臂转动时,使得同步带轮带动L型转动臂转动。当进行被动训练时(由屈膝到伸膝),具体传动关系如图8(b)所示。
在U型槽中安装同步带轮处自上而下标记为传动轴Ⅰ、传动轴Ⅱ、传动轴Ⅲ,下面将对其进行讨论。
(1)传动轴Ⅰ
传动轴Ⅰ安装有同步带轮Ⅰ,通过键将扭矩传递到L型转动臂,两端加工有螺纹孔,由螺钉固定端盖防止L型转动臂轴向窜动,其剖视图如图9所示。

图9 传动轴Ⅰ
(2)传动轴Ⅱ
传动轴Ⅱ的剖视图如图10所示,同步带轮Ⅱ和同步带轮Ⅲ由螺栓连接同步转动,轴的两端加工有螺纹孔,由螺钉固定在U型槽内。

图10 传动轴Ⅱ剖视图
(3)传动轴Ⅲ
传动轴Ⅲ与同步带轮Ⅳ通过螺钉固定,传动轴Ⅲ在右端由螺钉连到在固定座上。电机输出轴通过键传递扭矩到U型转动臂,从而带动同步带轮转动,其转动关系如图11。

图11 传动轴Ⅲ
3 运动学分析
下肢二连杆运动模型如图12所示,L1、L2分别U型转动臂、L型转动臂长度。s为OB的长度。θi(i=1,2)为杆OA与杆AB与水平方向的夹角。
由图12所示封闭的矢量三角形OAB可写出其矢量方程:

图12 下肢二连杆运动模型

其复数形式表示为:

由欧拉公式eix=cos(x)+isin(x)得

将式(5)关于时间求导,得:

式中:ω1、ω2、ν分别为杆OA的角速度、杆AB的角速度和末端的速度。
由式(6)再对时间求导,整理可得:

式中:a2、a1、a2分别为杆OA的角加速度、杆AB的角加速度和机构末端的加速度。
4 信息采集与仿真分析
4.1 试验对象信息采集
本研究随机选取10名脑卒中患者作为研究对象,其基本信息如表3所示,这些试验者均是自愿参加试验,且了解试验目的及试验方法。

表3 受试者基本信息
图13所示为脑卒中患者模拟下肢康复训练过程(患侧),由于大脑损伤,脑卒中患者下肢的运动能力远不如健康者。

图13 患者试验过程
试验采集以下患者数据如表4所示,即患者完成一次屈膝∕伸膝所需要的时间,患者做6次伸膝∕屈膝,分别记录所需要的时间,取平均数。由表可知,脑卒中患者下肢屈膝∕伸膝的频率大约为6 s∕次,其中患者E和患者G为高度偏瘫且肌张力过高,下肢主动训练无法完成。

表4 被测对象完成一次屈膝/伸膝所需时间s
4.2 被动训练时的人机学模型仿真分析
在脑卒中患者的被动训练中,调整U型转动臂角度α=60°,患者处于屈膝状态。患者康复训练时,由屈膝到伸膝。当α=80°,患者完成伸膝训练,开始进行屈膝训练,当α=60°患者完成屈膝训练。利用SolidWorks建立人机学模型并进行运动仿真分析。选取百分位数最大的成年男性(身高1 754 mm,大腿长度为496 mm,小腿长度为396 mm)为研究对象。在SolidWorks中建立的人机学模型,如图14所示。

图14 被动训练时人机学模型
当患者进行训练的频率为10次∕min时,即患者做一次屈膝∕伸膝训练时间为6 s时,由传动关系添加驱动,患者进行被动训练时,设定电机的输出角速度ω=10 sin(-πt/3),t∈(0~6)。仿真时间为6 s。
康复训练时,患者的足部与脚踏板由绑带固定,其速度与加速度曲线如图15所示。从图中可以看出,患者足部在水平方向上的运动平缓,加速度并无突变现象,速度的平均值132 mm∕s,峰值为198 mm∕s。正常成年人的步频为90~120 steps∕min,步行时足部在垂直方向上的平均速度约为200 mm∕s,康复机器人训练速度峰值小于正常人步行时在竖直方向的平均速度,不会对患者的腿部造成不适。脑卒中患者下肢在康复初期普遍肌张力较高,可适当将训练速度调小,随着下肢运动功能的恢复,康复中后期可将训练参数调整至正常人的步态参数训练。

图15 机构末端速度、加速度曲线
在训练过程中,患者的关节在矢状面内的角度变化如图16所示。膝关节和髋关节在矢状面内角度变化范围分别为(55°~134°)和(25°~51°),由表1所示的下肢关节活动角度可知,均在各关节活动变化范围内,不会对患者造成二次损伤。

图16 膝关节、髋关节活动角度
为了让患者在使用康复机器人时感到舒适,应尽量减少对膝关节的冲击力,如图17所示。膝关节加速度与角加速度,角加速度的最小值为-36(°)∕s2,角加速度最大值为88(°)∕s2。角加速度连续变化,不存在突变的情况,由此表明,该康复机器人具有较强的稳定性。

图17 膝关节角速度、角加速度曲线
5 结束语
本文研究了一种床边下肢康复机器人。在保证对患者不会造成二次伤害的前提下,实现了对患者的下肢进行被动训练、主动训练和健患侧结合训练等,解决了早期中风患者由于卧床下肢无法得到有效训练的问题。对机器人进行了详细的结构设计。建立人机学模型进行仿真分析,验证了该康复机器人可靠性与平稳性,更加符合人体下肢关节训练康复的需求。未来的工作将完善结构设计及控制系统;此外,还将加工装配该康复机器人并进行试验,验证该下肢康复机器人的有效性。
