兼具抗同步误差和耐高阻能力的直流配电网单极接地故障测距方法
2022-05-11吴宇奇叶雨晴李正天吴通华徐海波
吴宇奇,叶雨晴,2,马 啸,李正天,吴通华,徐海波
(1. 华中科技大学 强电磁工程与新技术国家重点实验室,湖北 武汉 430074;2. 国网浙江省电力有限公司 杭州供电公司,浙江 杭州 310016;3. 南瑞集团(国网电力科学研究院)有限公司 智能电网保护和运行控制国家重点实验室,江苏 南京 211106;4. 易事特集团股份有限公司,广东 东莞 523808)
0 引言
随着直流电源和负荷的快速发展,直流配电网凭借其特有的供电优势受到了专家学者的广泛关注[1-3]。然而,由于起步时间较晚,直流配电网故障测距技术,尤其是直流单极接地故障测距技术尚未得到充分的讨论,也尚未有较好的方案。一方面,有效接地配电网低阻故障场景下故障电流迅速上升的潜在风险,导致故障测距方法的可利用信息和测算时间大为受限[4]。另一方面,当发生直流高阻接地故障时,微弱的故障特征信息又将成为故障测距方法的一大严峻考验,但目前针对这一问题的研究还较为匮乏[5]。与此同时,直流配电网供电线路短、网络结构复杂,在应用高压直流输电领域中的部分故障测距方法,如行波法[6-7]时,将面临极高的采样频率需求、行波波头识别困难等问题,适应性大幅降低。
故障分析法根据所采集的电压、电流电气量或其特征参数与故障距离之间的函数关系进行故障测距。此类方法原理简单、采样频率较低,在中低压直流配电网中具有较高的研究和应用价值。文献[8]针对柔性直流配电网的电容暂态放电过程列写了基于RL线路的基尔霍夫电压方程,利用线路两端的电压、电流及电流微分实现故障测距。文献[9]详细分析了RL模型算法在直流配电网应用中的局限性,包括微分量的获取以及算法的数值稳定性,提出相应的改进策略后,形成了基于本地测量信息的直流测距式保护方案。文献[10]提出一种基于平波电抗器两侧时域电压暂态比的双端故障测距方法,研究了架空线和电缆相混合的供电场景。文献[11]利用五点数值微分替代算法计算故障瞬间暂态电流波形的切线斜率,联立线路两端的计算结果求解故障距离。文献[12]利用牛顿迭代法与最小二乘算法相结合的参数识别方式实现了单端故障测距和过渡电阻估算。然而,现有研究在采用双端信息进行故障测距时大多以双端采样数据严格同步为前提,这在实际现场难以时刻保障[13],且同步误差的存在通常会对故障分析法的故障测距精度产生较大的影响。此外,各类故障分析测距方法大多面向双极短路故障或低阻接地故障,对于直流配电网可能出现的高阻接地故障场景,对端的故障馈流效应将导致单端故障测距方法失效,同时弱化的故障分量易受噪声及直流开关波纹干扰,也将给双端故障测距方法带来不利影响。
另有学者尝试从外加注入信号的角度解决直流配电网故障测距信息受限和远端通信问题。文献[14]在系统离线状态下通过串联LC 注入装置形成衰减的单一振荡,利用非线性最小二乘拟合获得振荡频率、衰减系数,实现了直流配电网主动式故障测距。类似地,在基于LC 模块构成RLC 放电回路后,还可通过快速傅里叶变换[15]、Prony算法[16]等进行参数提取或是列写能量守恒方程[17]的方式计算故障所在位置。文献[18]则采用L 型故障测距模块构建两阶段RL放电回路进行单端故障测距。然而,主动注入式故障测距法多应用在离线场合,需要增加额外的一次设备,加剧了柔性直流配电网运维的复杂程度。且发生高阻接地故障时,故障测距所需的阻尼振荡也是难以构成的。
综上所述,基于双端量的故障分析法能够有效应对线路对端故障馈流的影响,不受衰减振荡特性的影响,无需停电后的额外操作,在不含分支的多端环形直流配电网故障测距中具有良好的适用性,但还需要对其抗同步误差性能和抗过渡电阻能力作进一步优化。本文面向直流配电网单极接地故障,以传统的RL 模型故障测距方法为着眼点,首先,介绍该方法的基础原理,并利用直流电抗器端电压替代电流微分项,以规避差分运算引入的故障测距误差;然后,针对低阻接地故障,基于短数据窗中的有限数据,通过自同步算法对双端数据非同步场景进行自主校正,同时设置不稳定点剔除判据,提高故障测距的鲁棒性,针对高阻接地故障,借鉴主动式故障测距思想,利用换流器引入短时扰动,配合滤波算法提高信噪比,基于长数据窗中的有效数据提高了故障测距的精确性;最后,通过多算例仿真验证了所提方法的有效性。
1 RL线路模型直流接地故障双端测距原理
根据已有的直流配电网单极接地故障研究成果,两电平电压源型换流器VSC(Voltage Source Converter)是一种常见的换流拓扑(下文中的VSC 均为两电平VSC),对于由VSC构成的多端环形直流配电网,单极接地故障的初始故障电流主要由各VSC故障极的电容放电电流构成。鉴于直流配电网线路较短、分布电容较小,VSC 的直流稳压电容是直流故障暂态过程的主导容性元件,因此可选取RL型线路模型开展故障测距研究。
以三端环形直流配电网为例,图1 为系统在正极接地故障电容放电阶段的简化等值电路。图中:Ck为第k个VSC 的正极稳压电容,uk为第k个VSC的正极稳压电容电压,Rij和Lij分别为第i、j个VSC之间正极线路的电阻和电感,线路电流iij和电容放电电流iCk的方向如图中所示,i,j,k=1,2,3;下标(1)、(2)分别表示故障点左、右侧的线路参数;Rf为过渡电阻。
由图1 可见,三端环形直流配电网在电容放电阶段具有高阶暂态响应特征,不易获取其解析表达式。然而,根据基尔霍夫电压定律,故障点两侧回路满足式(1)所示的方程。
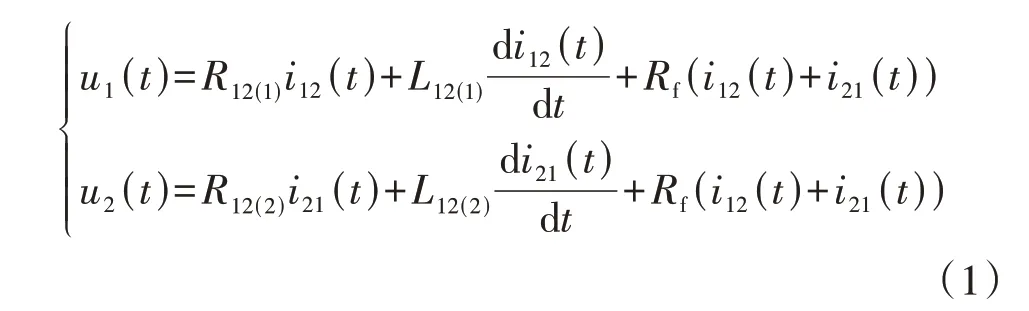
记故障线路全长为l,故障点距左端VSC1保护安装处的距离为x,单位长度线路的电阻和电感分别r0和l0,则联立式(1)方程消去故障电阻项可得:

由式(3)可知,故障距离的表达式中含有故障暂态电流i12(t)和i21(t)的微分项,难以直接测量。由于低阻接地故障的暂态电流发展迅猛,利用测量电流值的差分进行等效将导致误差增大,同时对保护的采样频率要求也更高。
当直流馈线两端装设有直流电抗器时,可利用电抗器的电感和端电压计算得到故障电流的微分值[9],如式(4)所示。
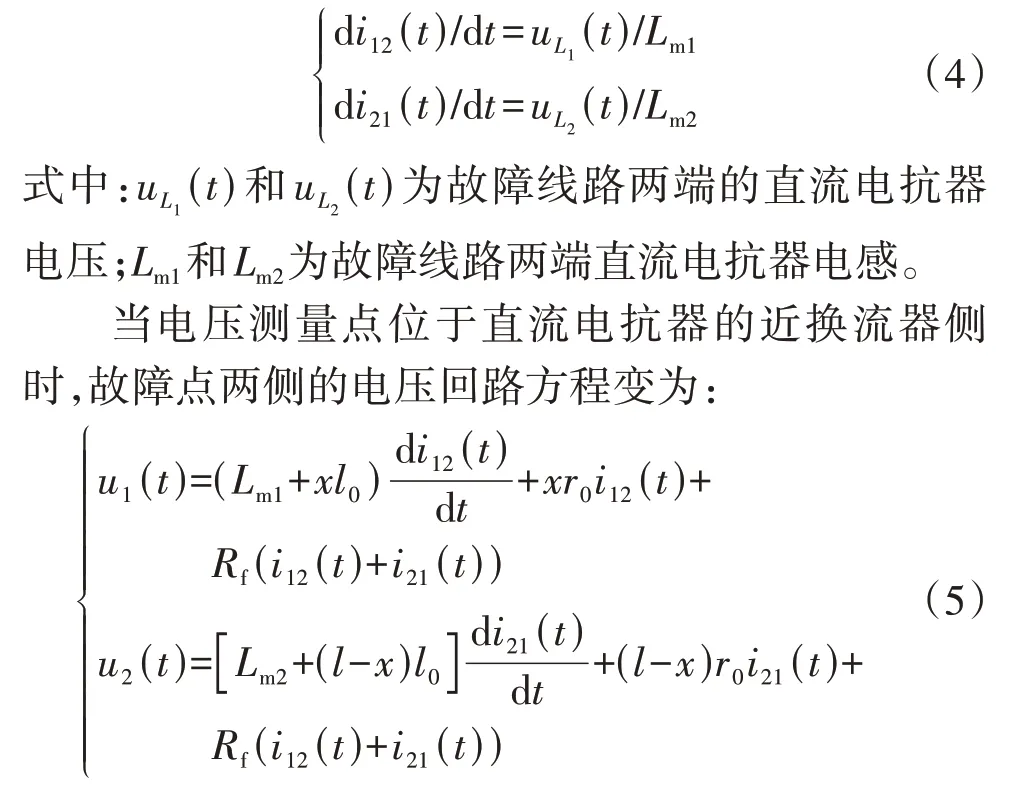

至此即利用线路两端实测的直流电抗器电压、故障极电压及电流、线路参数及直流电抗器电感,实现了双端故障测距,并摆脱了对微分量的依赖,同时降低了对采样频率的要求,选取常规的、合适的采样频率即可快速准确地实现故障测距。而对于式(6)所涉及的电压测量值,基于目前国内外直流工程中广泛使用的阻容分压器即可保证测量的高精度及稳定性[19]。
然而,尽管双端故障测距方法可以消除过渡电阻项对故障距离求解的影响,具有较高的精度,但需以两端数据严格同步为前提。此外,随着过渡电阻的增加,直流电压和直流电流的变化趋于平缓,导致噪声或电力电子开关通断所形成的高频波纹对故障测距结果产生不利影响。对此,本文从抗同步误差和耐过渡电阻2 个方面着手,对RL 线路模型直流接地故障双端测距方法进行改进。
2 基于最小距离方差的抗同步误差型故障测距优化算法
为避免双端数据不同步给直流配电网故障测距带来较大的误差,本文利用滑动数据窗对线路两端数据的不同对应时刻序列段依次进行故障测距计算。鉴于精确对时下数据窗内各点的求解结果相近且均匀分布在实际故障距离值附近,本文以窗内各点的距离方差最小为依据进行数据同步校正,并在剔除不稳定点的基础上将数据窗内各点距离的平均值作为最终的故障测距结果,具体步骤如下。
1)设置超高速保护启动判据(如传统过流保护判据,整定门槛可取1.5倍的额定运行电流),在其动作后,两端保护以数据窗长w1采集本端VSC 的出口电压和直流馈线上的暂态电流,再以长度为w2(w2<w1)的数据窗自第INT[0.5(w1-w2)]+1(其中INT[·]表示求整运算)个采样值开始,居中截取一段本端数据传递至对端保护。
2)在获得两端暂态数据后,以对端的电压、电流电气量为模板(同侧的各个电气量采样值视为同步)进行平移操作,每平移单位点数就利用两端对应采样值计算1 次故障距离,最终得到长度为w2的故障距离向量,记作Xp=[xp_1xp_2…xp_w2]。其中,xp_1、xp_2、…、xp_w2分别为对端数据量中采样点1、2、…、w2对应的故障距离;p=1,2,…,w1-w2+1,为数据窗平移点数。

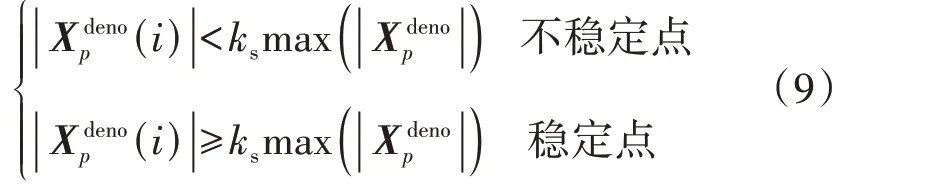
注意到式(6)存在分母项,且在理想状态下分子与分母的比值恒为一常数。然而,在数据窗滑动过程中,具有衰减振荡特性的直流电流及其微分值可能会使得分子与分母项同时接近0,继而产生较大的误差,在故障测距结果上形成明显的冲击。
因此,为剔除上述情况下的不稳定点,以进一步提高故障测距精度,在计算故障距离时设置判据如下:
3 基于VSC 短时注入扰动的耐高阻型故障测距改进方法
在低阻接地故障情况下,直流配电网显著的暂态放电过程能够保障故障测距精度维持在较高水平。而随着过渡电阻的增大,故障电流由欠阻尼振荡特性逐步转为过阻尼衰减特性,电压跌落程度也随之降低、速度放缓,导致故障暂态信号的强度减小。同时,直流配电网中由电力电子开关通断引发的高频波纹更加凸显,进一步阻碍了故障暂态信号的准确获取,由此导致上述低阻故障测距方法的性能下降。
为提高直流配电网高阻接地故障的测距精度,可以考虑从以下2 个方面加以改进:一是增加滤波环节,降低高频开关波纹对故障暂态信号的干扰;二是从根本上增大直流暂态扰动,使得故障测距所用的信号更加清晰。值得一提的是,高阻接地故障不存在明显的过流现象,VSC 的耐受时间较长,保护固有动作时间和快速性需求有所放宽,因此在高阻接地故障场景下增设滤波和扰动注入2 个环节,通过付出一定的时间代价提高故障测距精度是可行的。此外还可在保护动作允许范围内适当延长采样数据窗长,减小故障测距的随机误差。
3.1 滑动均值滤波
滑动均值滤波又称递推平均滤波,属于低通滤波器,其基于先进先出原则,将滑动窗中的连续wm个采样值的算数平均值作为当前输出的滤波结果,具有平滑度高、周期性干扰抑制作用良好等优势,其运算表达式为:
式中:A(ω)为滑动均值滤波幅值;y(ω)为滤波输出信号频域表达式;x(ω)为滤波输入信号频域表达式;ω为角频率;Tw_m为滤波窗长。
根据式(11),绘制滑动均值滤波的幅频特性曲线,见图2。图中:f为实际频率;fw_m=1/Tw_m=fs/wm,fs为采样频率;0.442 Hz 为截止频率。由图可见,滑动均值滤波对高频分量具有一定的抑制作用,且能够滤除fw_m的整倍数次谐波,对于直流分量,其幅值不变,A(ω)=1。

图2 滑动均值滤波器幅频特性曲线Fig.2 Amplitude-frequency characteristic curve of sliding average filter
3.2 直流扰动注入
借助电力电子设备灵活的信号调制能力可以在一定程度上放大原有的故障信号或构建新的故障测距特征,对于非有效接地方式或大过渡电阻导致的弱电流故障,具有良好的应用前景[20]。本文利用直流配电网并网换流器向直流系统注入小幅扰动,以提高故障测距数据的信噪比,从而进一步提升双端故障测距方法的耐过渡电阻水平。
考虑常规的双环控制器,扰动信号的注入控制框图如图3所示。
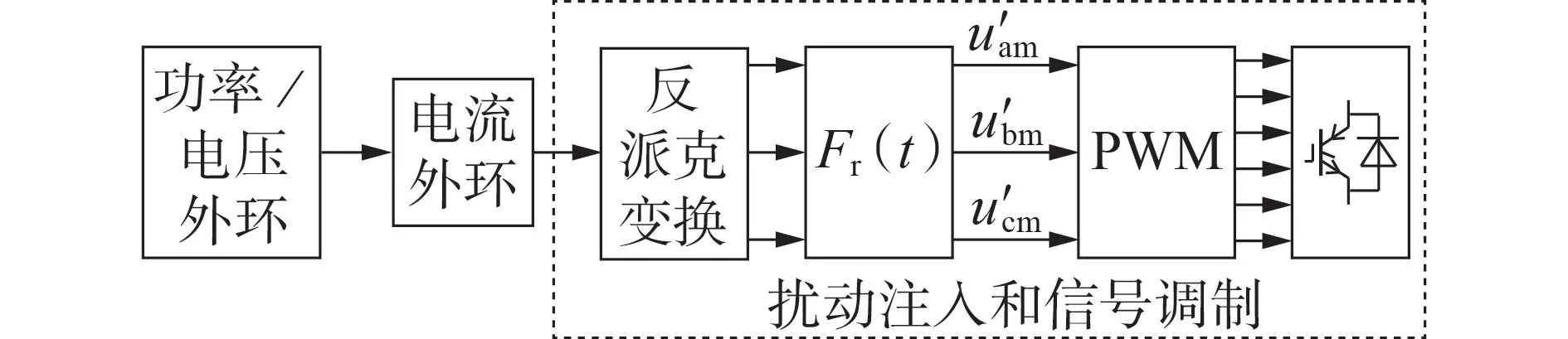
图3 扰动信号注入的控制框图Fig.3 Control block diagram of disturbance injection

式中:A为原始工频相电压调制波幅值;ω0为调制信号角频率。
根据正弦脉宽调制(SPWM)机理可知,当三相调制参考波同时为0 时,双极性三角载波和参考波幅值比较所生成的IGBT 触发信号将使得VSC 的三相上桥臂或下桥臂同时导通,开关函数[sa,sb,sc]为[1,1,1]或[0,0,0]。此时,交流系统将呈现三相短路故障的特征,交直流系统的电流回路相互分离。VSC 的上述运行模式又称为零模式,一般应用于空间矢量调制,按照功率开关切换次数最少原则进行选择。当三相网侧电流ia>0、ib<0、ic>0 时,VSC 在开关模式[1,1,1]和[0,0,0]下的电流回路如图4 中的加粗部分所示[21]。

图4 ia>0、ib<0、ic>0时,零模式下的VSC电流回路Fig.4 VSC current loop in zero mode when ia>0,ib<0 and ic>0
由图4 可知,在该扰动方式下,直流配电网将出现短时功率差额,造成直流电压、电流波动,且波动方向与扰动注入前的功率流向相关。此外,扰动作用时间(即VSC 运行于零模式的时间)越长,对配电网安全稳定运行的影响越大,可能造成交流配电网因三相短路过流而导致开关管闭锁或损坏,亦或引发相关保护误动。若扰动作用时间过短,则会导致扰动信号微弱,难以有效提升直流接地故障测距精度。
因此,扰动施加的时长应综合考虑直流配电网的额定运行功率、系统参数等,通常μs 级或若干ms的扰动是可以接受的,不会引起交流侧显著过流或直流侧电压波动越限。在实际应用时也可以采取多次注入、扰动时长逐步递增的方式,寻求系统运行干扰和故障测距之间的良好平衡。
综上所述,本文所提双端故障测距方法的完整流程如附录A 图A1 所示。若保护装置配置有相应的故障选线功能[22],则先经故障选线再针对具体故障线路执行故障测距计算,否则系统中所有线路双端故障测距方法均处于实时待命状态。低阻接地故障可通过超高速保护判据进行检测(如传统过流保护),若判据不被满足则视为高阻接地故障,需借助其他抗过阻型启动判据[5]或后备保护实现故障的可靠辨识。本文方法采用移动数据窗和外加注入扰动,因此对故障检测时刻敏感度不高,故本文暂未对具体的故障测距启动判据开展研究,进行数据窗长的选择时主要考虑直流保护动作要求时间(主保护为3~5 ms,后备保护小于20 ms)[23]以及在特定采样频率下尽可能获取更多采样数据。相关参数将在第4节中进行具体说明。
4 仿真分析
4.1 仿真模型说明
为验证本文方法的正确性和有效性,以图5所示的三端直流配电网为例进行仿真试验。图中:3 个交流配电网的电压均为35 kV;直流电压为±10 kV;联接变压器采用△/Y 接线形式,阀侧经10 Ω 电阻接地;直流侧各VSC均于分裂电容处直接接地;换流站Ⅰ采用Vdc/Vac控制;换流站Ⅱ、Ⅲ均采用P/Vac控制,有功功率参考值分别为4、10 MW,由交流侧流向直流侧。参照现场工程参数,设置直流配电网的单位长度线路电阻、电感分别为0.058 6 Ω/km、0.6 mH/km,线路长度如图5中所示。线路两侧各极装设有0.5 mH的平波电抗,采样频率选取为10 kHz,根据下文具体仿真计算结果选定筛选系数ks=0.3。
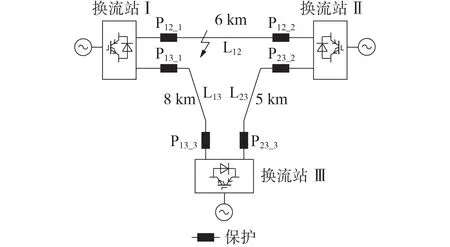
图5 三端环形直流配电网仿真模型Fig.5 Simulation model of three-terminal circular DC distribution network
4.2 低阻接地故障场景下故障测距性能分析
1)双端信息同步。
故障场景1:设置线路L12分别发生过渡电阻为0.01 Ω 和5 Ω 的正极接地故障,故障距离从0.5 km开始以0.5 km 为步长逐步增加,故障时刻为1 s。由于低阻接地故障发展速度快,因此利用本端故障后0.5~2.5 ms的数据和对端故障后1~2 ms的数据进行故障测距(w1=21,w2=11)。在保护P12_1和保护P12_2的数据完全同步的情况下,根据本文所提双端故障测距方法进行被动式故障测距,故障测距误差计算公式为:

式中:xreal为实际故障距离。
不同故障场景下的故障测距结果如附录A 表A1所示。表中:xreal为故障点与P12_1的距离;8 km(区外)表示故障位于线路L23上距离P23_22 km 处,属于区外故障。由表可见:本文方法对RL型线路具有较高的计算精度,在金属性接地故障场景下,可将不同区内故障的σ控制在0.7%以内;随着过渡电阻的增大,σ有所增大;对于区外故障,故障测距结果远超保护所在线路的长度,因此本文方法可准确辨识区内与区外故障。
取上述过渡电阻为5 Ω 的区内正极接地故障场景,剔除不稳定点前后,本文方法的故障测距结果如图6 所示。由图可见,由于暂态数据量有限,不稳定点的存在将导致故障测距误差急剧增加,通过式(9)剔除不稳定点能够有效提升故障测距方法的性能,适应不同故障位置、过渡电阻及数据窗长下暂态波形的差异性。
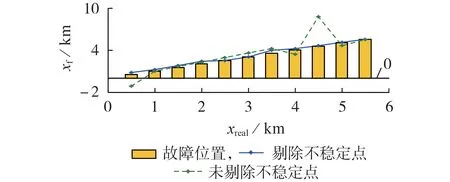
图6 剔除不稳定点前后,本文方法的故障测距结果Fig.6 Fault locating results of proposed method with and without unstable points
2)抗同步误差性能分析。
假设线路L12两端数据非完全同步,存在不同的采样步长时间差时(同端的电压与电流信号默认同步),金属性接地故障的故障测距结果如附录A 图A2 所示。由图A2(a)可见:当两端数据非完全同步时,数据窗内各点的故障测距结果存在较大偏差,距离方差随着同步性能的劣化而增大;当p=5 时,由图中的绿色柱状可看出,数据窗内各点的无偏方差最小,所得最终故障距离与实际距离(如图A2(b)中的黑色虚线所示)最为接近。因此,通过滑动数据窗并以距离方差最小为依据,可有效实现数据自同步,减少同步误差带来的不利影响。随着采样频率的提高或借助插值等信号处理手段,双端故障测距方法的抗同步误差性能还将得到进一步提升,而计及多变量时间序列的自同步算法还可用于应对更为复杂的失步场景,如在双端数据非完全同步的情况下,同端数据也存在同步误差等。
4.3 高阻接地故障场景下故障测距性能分析
1)耐过渡电阻性能分析。
在线路L12上设置过渡电阻为50 Ω 的正极接地故障(1.5倍额定电流过流判据已经无法辨识),故障时刻为1 s,故障点距离保护3 km。在故障发生8 ms后引入三相调制波短时扰动,使各相调制波瞬时降为0,根据下文仿真测试结果确定扰动持续时长为2 ms,其后恢复正常。图7 为有无扰动情况下的直流配电网网保护P12_1处的正极电压和正极电流波形。由图可见,在调制波短时降为0 后,直流配电网的正极电压和正极电流产生了小幅振荡,但仍然位于额定值附近,对系统运行影响不大。
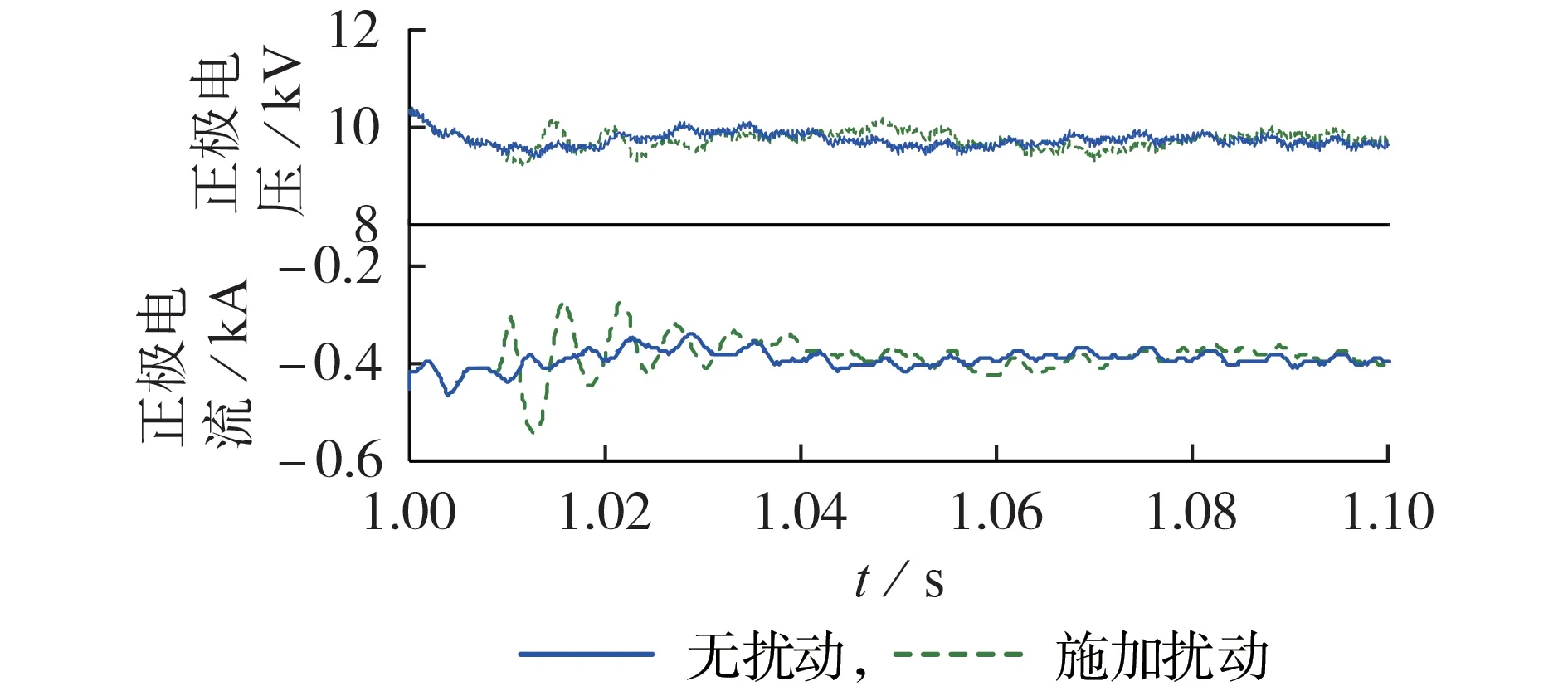
图7 P12_1处的正极电压和正极电流Fig.7 Positive-pole voltage and current at P12_1
考虑到搭建的直流配电网在运行过程中其电气量存在以3 ms 左右为周期的高频波纹,滑动均值滤波的数据窗长度定为60 个采样点。提取本端故障后10~20 ms 和对端故障后11~19 ms 的滤波后暂态数据(w1=101,w2=81),计算得到xf=2.997 4 km,σ仅为0.0867%。而基于短数据窗的初始故障测距方法(下文简称初始方法)未经滤波和扰动注入,其计算结果为2.742 2 km,σ高达8.593 3%,可见本文方法的耐高阻能力得到了大幅提升。
在距换流站Ⅰ直流母线1、2、…、5 km 处分别设置过渡电阻为50、100、300 Ω 的正极接地故障,本文方法和初始方法的故障测距结果如附录A 表A2所示。由表可知:初始方法的σ较大,最高达到了108.5%;本文方法采用了主动式扰动注入和均值滤波,能够有效提高双端故障测距算法在高阻接地故障场景下的计算精度,σ均控制在3%以内,部分工况下的的故障测距性能甚至高于4.2 节中的5 Ω 低阻接地故障场景。重要原因之一为高阻接地故障对故障测距时间的约束较小,可以允许一定的滤波延时,并利用更多数据更加全面地反映故障位置信息,减小随机误差带来的影响,但随着过渡电阻的增大,其测距性能同样会随之降低。
2)直流扰动注入时长分析。
为寻求系统运行干扰和故障测距之间的良好平衡,现考虑主要以直流电压偏差范围、交流电流最大峰值以及故障测距精度作为选取依据以确定扰动施加的合适时长。其中,国家标准《中低压直流配电电压导则》规定,±10 kV 等级的直流供电电压偏差范围为标称电压的-10%~5%[24]。仿真模型中,交流侧设定的额定电流峰值为0.89 kA,过电流保护门槛值整定为1.2倍的额定电流。
在线路L12上设置过渡电阻为50 Ω 的正极接地故障,故障点距离保护3 km,故障时刻为1 s,在故障发生8 ms 后引入三相调制波短时扰动使其置0,滑动均值滤波的数据窗长度定为60 个采样点。不同直流扰动注入时长下的系统波动情况与故障测距结果如附录A 表A3所示。由结果可知:随着直流扰动注入时长的增加,直流电压偏差范围和交流电流最大峰值逐渐增大,在直流扰动注入时长为2.5 ms时,直流电压超过标准上限,交流电流逼近过电流保护整定值;在直流扰动注入时长为3.0 ms时,直流电压和交流电流均已超越规定阈值,或引发系统内相关保护误动。对于故障测距精度而言,在直流扰动注入时间较短时,由于扰动信号微弱,直流接地故障的测距精度较低;随着扰动作用时间的延长,故障测距精度逐渐提升;但扰动时间较长,例如扰动时长为3 ms 时,此时的σ=4.103%,相比0.5~2.5 ms 直流扰动注入时长下的故障测距结果反而精度下降,其可能的原因是直流扰动时间过长影响了系统的安全稳定运行,故障测距相关的电气参量严重偏离额定值,同时本文方法仅采样扰动注入结束后的数据(为躲开结束扰动产生的二次冲击),扰动注入时间过长使得采样数据窗长减小,或导致故障测距精度下降。综上所述,在本文仿真测试场景下选择直流扰动注入时长为2 ms较为适宜。
4.4 对比分析
文献[8]同为基于RL模型的在线式双端故障测距方法,计算数据窗为故障后1 ms,选用20 kHz 采样频率,并采用相邻2 个采样点平均值代替中间时刻瞬时值、两点差分与时间差分之比分别表示瞬时值及微分导数运算。将本文方法与文献[8]在3 种场景下进行性能比较:①金属性故障且双端数据同步;②金属性故障且双端数据存在0.2 ms 的同步误差;③过渡电阻为300 Ω 的高阻故障且双端数据同步。以0.5 km 为步长设置不同的区内故障位置点,得到2种方法的平均故障测距误差-σ如附录A 表A4所示。由表可知,在低阻故障且双端数据同步的场景下,2 种方法的精度十分相近,而由于本文方法额外考虑了双端数据自同步算法和应对大过渡电阻的优化策略,因此在场景①、②下的故障测距误差显著低于文献[8]方法,测距综合性能获得了有效提升。
5 结论
本文基于传统的双端型RL线路模型测距方法,分别针对直流配电网低阻和高阻接地故障提出考虑不同数据窗长的优化改进策略,并结合直流配电网VSC 的调控功能,从多个方面提升故障测距性能,该方法具有如下特征:
1)利用滑动数据窗和最小距离方差实现双端信号的自同步,并构建不稳定点剔除判据以获取同步数据窗下稳定点的测距均值,由此可提升低阻接地故障下短数据窗故障测距算法的抗同步误差能力,以及不同场景下对暂态波形的适应性;
2)针对高阻接地故障,利用均值滤波算法降低直流配网中原始波纹的干扰,并通过VSC 短时的零模式运行方式引入小幅扰动,凸显故障测距有效信息,进而基于较长数据窗的双端数据交互提高了直流故障的测距精度,也为主动式直流故障测距方案的制定提供了新思路。
附录见本刊网络版(http://www.epae.cn)。
