基于激光点云数据的三维景观建模研究
2022-05-11于长江
于长江
(上饶师范学院,经济与管理学院, 江西,上饶 334100)
0 引言
生态环境资源的利用推动了国家的城市化和工业化进程,但能源大量开采会破坏地球生态平衡,大力发展生态景观领域,重视“低碳理念”已成为解决生态环境问题的重要途径[1-2]。激光扫描技术快速发展,将其应用于生态领域已成为重要趋势,将生态学问题通过激光扫描技术解决已取得重大成效[3]。利用激光扫描技术获取三维点云,通过处理软件提取三维点云数据参数,获取众多生态信息。激光扫描技术相比于传统测量方法,可实时精准获取目标物体点云数据[4],从点测量发展至面测量,获取目标物体各点的位置信息,将目标物体位置信息精准展示至用户。将激光扫描技术应用于三维景观建模中,利用计算机所建立模型展示物理世界目标,可为发现规律、外形模拟提供工具[5]。
景观的三维建模是计算机图形领域的研究重点,目前已有众多建模技术应用于景观建模中。曹明兰等[6]研究倾斜摄影与激光扫描技术结合的3D森林景观建模;赵凯等[7]研究基于OpenGL的交互式三维树木建模与可视化,2种方法均可实现高速度景观建模,但均具有细节表达能力差、建模工作量大的缺陷[8]。
景观的三维形态建模为景观设计领域提供新的发展方向,利用激光扫描技术建立景观模型后,用户可利用所建立模型明确景观设计缺陷,针对三维形态景观模型依据用户需求实时修改[9],为空间信息获取提供新途径。研究激光点云数据的三维景观建模,利用激光扫描技术采集景观点云数据,利用计算机后续处理点云数据实现景观模型建立,并通过实验验证该方法具的建模有效性,可应用于实际景观模型建立中,为景观模拟等重要研究方面提供一定帮助。
1 激光点云数据的三维景观建模
1.1 数据采集
利用激光扫描技术扫描目标景观,通过运行激光扫描仪设备实现全方位扫描目标景观,获取待建模景观的点云数据。利用激光扫描仪获取原始观测数据内容如下:激光扫描仪所发射激光束竖直方向角和水平方向角通过2个连续转动的具有反射脉冲激光的镜子角度值获取[10];利用激光束的2个角度和所检测距离获取各扫描点与激光扫描仪相应空间相对坐标;激光扫描仪扫描点的放射强度等。用(x,y,z,h)表示激光扫描仪所获取扫描点,可得激光扫描仪获取三维激光扫描点坐标(x,y,z)公式如:
(1)
式中,θ与η分别表示激光束竖直方向角和水平方向角,L与h分别表示激光扫描仪至扫描点的斜距以及反射强度。
激光扫描仪采集数据质量决定了所建立景观模型的质量。激光扫描仪数据采集过程如下。
(1) 设置目标球。为保证各扫描站数据在相同坐标系精准配准,设置目标球数量需大于3,且所设置目标球需在不同平面内,直至完成扫描为止所设置目标球禁止移动。
(2) 扫描站设置。依据实际情况在待建立景观模型实际地点设置扫描站,扫描站设置过程中需避免遮挡情况,目标球需无法遮挡树木等景观。
(3) 数据采集。利用激光扫描仪获取景观点云数据,采集景观纹理映射数据。
利用FARO Scene软件控制激光扫描仪扫描过程,首先通过粗扫描获取景观信息,识别景观中包含的目标物体后通过精扫描降低扫描时间。为避免扫描过程中丢失较小的目标景观,需验证扫描距离和扫描精度。用O与W分别表示激光扫描仪与景观目标物体距离以及物体宽度,2π表示激光扫描的圆周周长,激光扫描仪旋转360°所采集点云数据均包含在圆周内。用Nd表示激光扫描仪分辨率,可得目标景观宽度相应点云数量Nn公式如:
(2)
明确景观目标物体点云数量后,即可获取激光扫描仪所需设置精度以及距离,扫描过程中依据景观实际情况,在点云数量允许情况下调整激光扫描仪距离以及精度。
1.2 点云数据预处理

f(K,G)=min ∑[K·ai+G-bi]
(3)
式中,ai、bi均为需配准的采集点。
选取任一点设站方式采集激光扫描数据,各组点云数据坐标系并未统一,设置第1站标靶为基准坐标,将第2站和第3站数据采集点分别与第1站配准,利用RiSCAN pro软件完成点云数据精细配准。
1.3 点云分割
三维景观场景点云数据通常较为复杂,通过点云分割可利用存在相似特征测度的匀质单元表示复杂的三维景观。特征测度包含激光扫描技术所获取点云信息的平均高程、模型拟合参数、光谱等参数。利用高维的特征空间向量表现单一测度,将点云数据利用聚类分割方法实现分割于高维特征空间中。用P表示扫描点集,将点集P相关联的表面区域用Q表示,Q的子区域集合用{Q1,Q2,…,Qi,…,Qn}表示,当该子区域集合符合以下条件时,该子区域集合即为点集P的区域分割。
(2)Qi∩Q≠φ,∀i≠j。随机点无法同时属于不同分割区域φ,即分割区域不存在重叠情况;
(3)Qi,i=1,2,…,n。Qi表示连通区域,各分割区域内的点互相连通;
(4)L(Qi)=True,i=1,2,…,n。区域内是否存在相似度相同的判断算子用L(Qi)表示,即相似测度的点存在于相同分割区域内;
(5)L(Qi)=False,∀i=1,2,…,n,j=1,2,…,n,i≠j。存在差异相似测度特性于不同分割区域内。
1.4 NURBS自由曲面拟合三维景观模型
自由曲面是景观三维激光扫描点云内目标所建立模型的主要表现形式,通过自由曲面建模方法依据激光扫描技术所获取点云数据实现三维景观建模。自由曲面类型复杂多变,利用自由曲线以及自由曲面组合实现目标景观的三维重建,通过NURBS曲面实现景观自由曲面的拟合重建。
定义NURBS公式如:
(4)
式中,Ei.j与Di.j分别表示控制顶点以及权因子,k表示u方向的B样条基函数幂次,l表示v方向的B样条基函数幂次,Ci,k(u)表示u项k阶的B样条基函数,Cj,l(v)表示v项l阶的B样条基函数,依据B样条基函数利用u向以及v向的节点矢U量与V,获取递推公式如:
(5)
控制多边形网由控制顶点构成,其与v向以及u向节点矢量组成景观最终曲面,曲面的推远以及拉近操作可通过对应权因子调整实现。
NURBS曲面重建拟合过程为:提取曲面点云边界,插值操作NURBS曲线建立四边形区域,选取孔斯曲面方法生成四边形区域基础面;在基础面上将曲面点投影,并对投影实施参数化;选取最小二乘逼近方法拟合NURBS曲面。曲面拟合流程如图1所示。
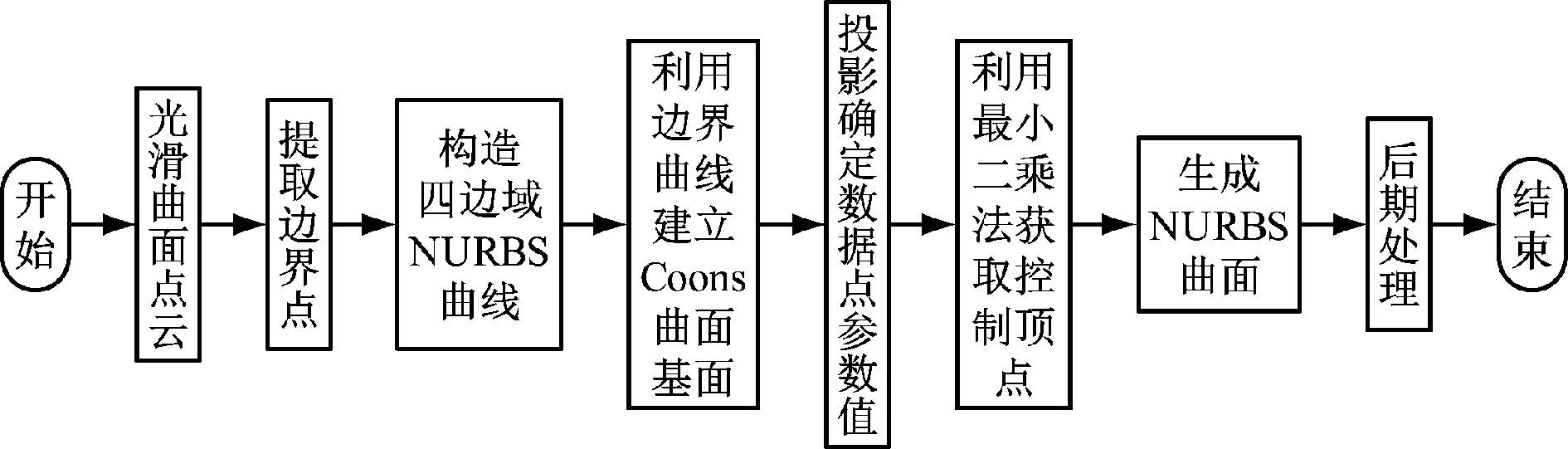
图1 NURBS拟合基面投影法重建
利用边界点特征提取方法针对光滑区域的边界快速提取与四边域构造过程如下。
(1) 提取边界点特征。提取曲面点云边界点相应特征,需满足边界点特征的椭球性质。利用边界特征点提取方法提取曲面边界点,利用三维Delaunay构网方法建立网格。当其中的三角边属于唯一三角面片时,设置该三角边为轮廓边界,边界点为该三角边的2个端点,将曲面点云边界轮廓依据边界拓扑关系获取。三维Delaunay构网的点数量在提取特征时有所降低,边界提取精度有所提升。
(2) 构造边界曲线。提取点云边界后,利用划分多线段建立四边界。夹角∠abc由相同边界曲线上的三点构成,该夹角需大于所设定阈值Thang。边界分离点可利用夹角大小判定所获取,判断过程如下。
(a) 用{Fi}表示边界点数组,且F0=Fn。

(3) 交互编辑边界曲线。通过上步所获取曲线数量不等于4时,通过合并或交互划分构造边界。构造曲面点云区域四边界后,完成后期的参数化、基面构造和拟合处理,获取最终重建的三维景观模型。
完成三维景观模型建立后,选取Sketchup、3Dmax等软件实现所重建三维景观模型的美化修饰、拓扑接边等后期处理。
2 实例分析
为验证本文方法建立三维景观模型的有效性,选取某小区内园林景观作为实验对象,采用本文方法对该小区景观进行三维建模。利用型号为Riegl VZ-1000的地面型三维激光扫描仪扫描景观点云数据,该激光扫描仪平均扫描距离以及标称扫描精度分别为25 m和±6 mm。该小区内设置扫描站点数量为12个,保证景观各点均可由3个扫描站点采集数据。采用本文方法建立该小区三维景观模型结果如图2所示。由图2实验结果可以看出,采用本文方法可实现三维景观模型有效建立,所建立模型真实性较强,色彩鲜明,可有效模拟景观内所包含各目标物体实际情况。图2实验结果有效验证采用激光扫描技术建立三维景观模型具有较高的有效性。
为进一步验证所建立模型对细节的处理程度,将所建立三维景观模型内某凉亭景观放大,观察采用本文方法所建立三维景观模型对细节的呈现程度,三维景观模型内的凉亭景观放大结果如图3所示。由图3实验结果可以看出,采用本文方法所建立三维景观模型的景观细节呈现效果较好。主要原因是本文方法采用激光扫描技术,利用激光扫描技术采集景观的高精度信息,能够实现目标景观精准建模。
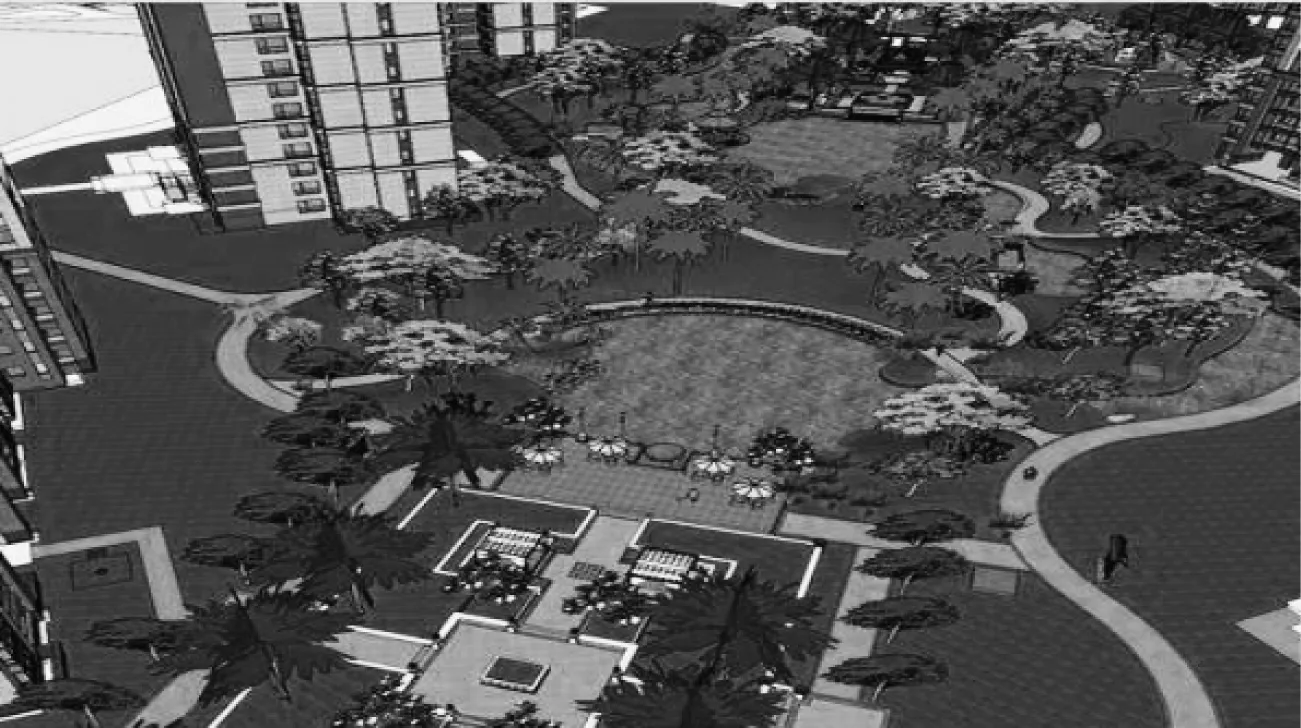
图2 所建立三维景观模型

图3 凉亭景观放大结果
从所建立的三维景观模型中随机选取10个点,统计采用本文方法建立三维景观模型内各检测点的拟合残差均值,并将本文方法与文献[6]方法和文献[7]方法对比,对比结果如图4所示。由图4实验结果可以看出,采用本文方法建立三维景观模型,各检测点的拟合残差均值均低于4 mm,本文方法建立三维景观模型的拟合残差均值明显低于文献[6]方法和文献[7]方法,有效验证了本文方法在建立三维景观模型过程中具有较高的拟合精度,能提升模型建立性能。
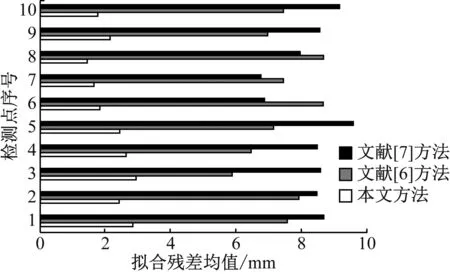
图4 拟合残差均值
为直观验证本文方法所建立模型精度,选取文献[6]方法和文献[7]方法作为对比方法,不同方法对于所建立三维景观模型内各景观长度与实际长度间误差统计结果如表1所示。表1实验结果可以看出,采用本文方法建立三维景观模型的建模精度明显高于另2种方法,本文方法所建立三维景观模型的建模误差均低于10 cm;文献[6]方法和文献[7]方法的三维景观建模误差均高于20 cm。本文方法具有较低的三维景观建模误差,建模精度高,较高的建模精度有助于提升三维景观建模效果。以上实验结果可以验证本文方法的三维景观建模效果优于另2种方法,优越性高。
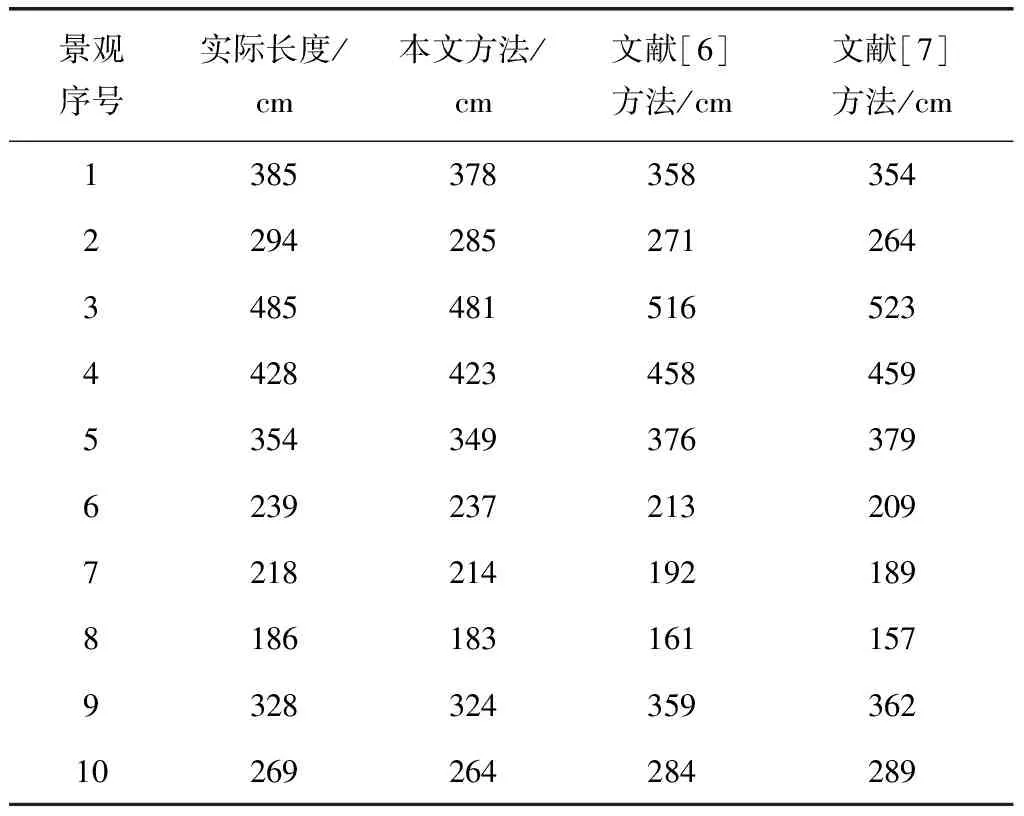
表1 建模误差统计结果
3 总结
将激光扫描技术应用于三维景观建模中,通过实验验证采用该方法建立三维景观模型的有效性。该方法可实现三维景观建模的高精度以及高仿真性能,所建立三维景观模型拼接点云所形成误差较小,所采集点云数据具有较高的精度和完整性,提取景观特征明显,可有效提升模型建立效果,避免由于纹理映射导致的模型变形情况,能够为景观的三维建模提供理论依据,具有较高的实用性。
