机载数据总线分布式测试系统设计与实现
2022-05-11姚锋刚
姚锋刚
(西安航空职业技术学院, 人工智能学院, 陕西, 西安 710089)
0 引言
随着航空电子技术的发展,飞机上各类机载设备逐渐多样化且更加复杂,大量数据需要在设备之间进行数据传输以及运算,对设备的可靠性、通信的稳定性以及分布式控制都提出了新的挑战。机载设备间存在多种数据总线共存的情况,多总线融合技术的出现促进了多平台的统一应用,在这种背景下,研究分布式测试系统监测设备状态及性能指标势在必行。
1 核心技术
1.1 航空总线技术
航空系统中计算机的普及使得总线技术得到了推广。总线技术是从工程的角度在整体上对系统的设计,通过多路数据传输总线构建分布式网络实现信息的传输与共享。目前总线技术已成为飞机的一大特色,其中应用最为广泛的总线标准包括以下几类。
(1)CAN:CAN(Controller Area Network)总线已经被制定为国际标准,在国际上应用最为广泛,具有高可靠性以及高错误检测能力。
(2)RS232/RS422:RS232标准由美国电子工业协会制定,相对来说传输距离不高,演进出来的RS422采用单独收发信道,降低噪声干扰,传输速率较高,传输距离更远。
(3)MIL-STD-1553B:该总线为美国军用标准,利用曼彻斯特码通过双绞线进行传输,可以挂接控制器、监视器、远程终端。具有速度快、通信效率高、扩展及维护方便的特点,冗余容错能力使系统可靠性大幅提高[1]。
(4)ARINC429:该总线由美国航空电子工程委员会提出,在各类民用飞机应用广泛,由于非集中控制,可靠性较高,且性能稳定、结构简单,具有很高的抗干扰能力。
1.2 以太网技术
以太网是目前局域网中通用的协议标准,属于拓扑结构,它将所有计算机相连,通过广播在无源介质实现消息传递,主要包括标准以太网、快速以太网、千兆以太网、万兆以太网,具有可移植、低成本、易维护、结构简单易实现、传输效率高的特性。实时性与可靠性不仅可以满足各类控制要求,还为系统的后续发展提供可能,因此选择以太网技术作为现场总线。
2 基于以太网的多总线融合器
由于飞机上存在不同的机载设备,使用的数据总线、网络结构以及接口各不相同,不同总线技术的功能和实现标准也不相同,为了适应复杂的现场环境,将多种总线融合起来,实现信息共享。
2.1 数据帧格式
以太网包括4种不同的格式帧,每一种格式都存在8个字节的前导字符,其中,前7个为前同步码,后1个为起始标识符[2]。在多总线融合器的设计过程中采用EthernetⅡ格式,利用帧头和帧尾中的字段实现总线类型标记。将不同的总线协议映射到帧之中的数据域,如表1所示。根据帧头判断总线类型,根据帧尾判断该数据帧是否结束。
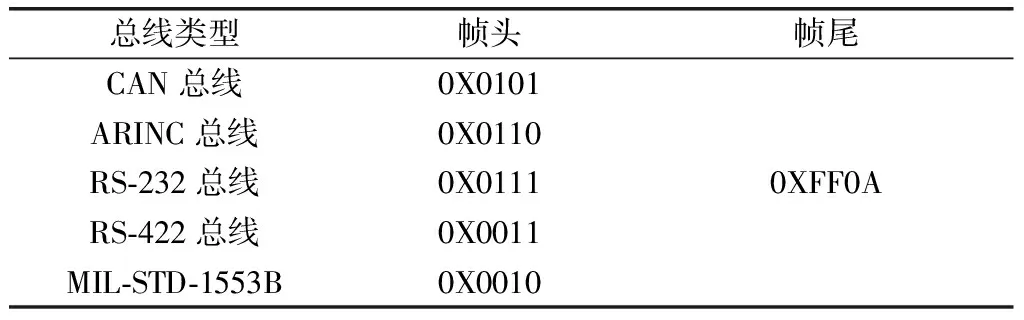
表1 多种总线帧头帧尾映射关系
2.2 多总线融合器
曼彻斯特编码是以太网系统中广泛应用的信道编码,具有自动同步能力,其实现原理为在信号流中加入时钟,将时钟信号一并进行传输,具有极强的抗干扰性,因此选用曼彻斯特编码对数据进行编码与解码后,加上帧头、帧尾组成完整的总线数据格式,传输至相应系统的接口,实现多总线的融合。过程如图1所示。
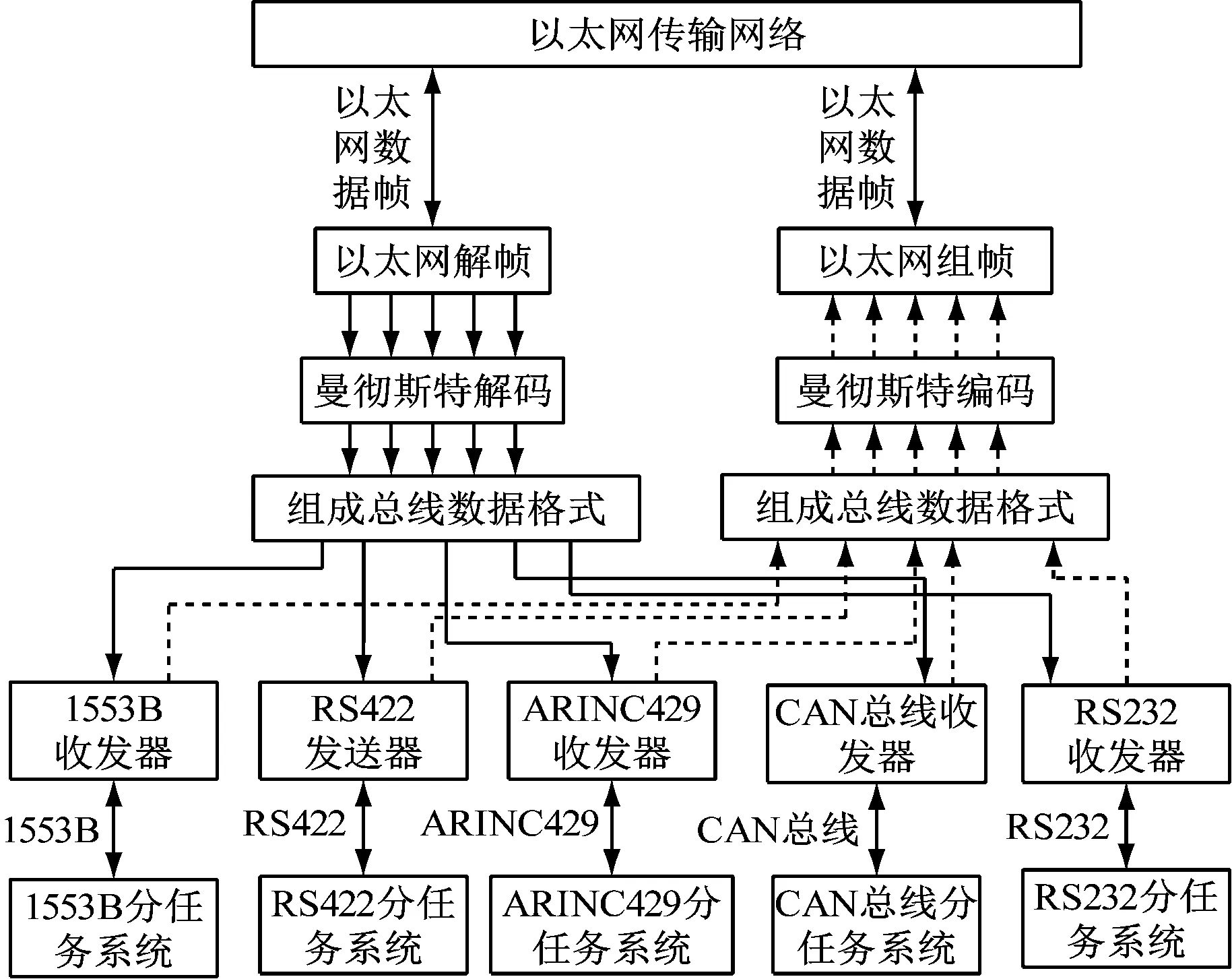
图1 基于以太网的多总线融合
3 机载数据总线分布式测试系统设计
3.1 整体架构
机载数据总线分布式测试系统在整体架构上包括多总线融合器、分布式控制中心、分布式测试节点。整体架构如图2所示。
(1)多总线融合器:由各类总线通信标准的接口组成,实现多总线融合。
(2)分布式控制中心:利用工业用计算机、以太网板卡实现。可连接单个或多个控制节点实现分布式控制[3]。
(3)分布式测试节点:控制节点下可连接单个或多个测试节点执行具体控制命令。
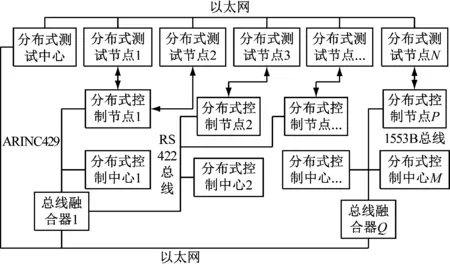
图2 系统整体架构
3.2 硬件设计与实现
3.2.1 以太网接口
以太网接口包括MAC层、物理层。由于分布式测试系统对通信实时性有较高要求,鉴于以下优点MAC层采用C6472控制器,物理层采用DP83865芯片。
(1)MAC层:C6472集成了EMAC(以太网控制器)、MDIO(输入输出管理器)2个部分。EMAC负责处理器到物理层的数据包,全双供千兆操作,支持RMⅡ、RGMⅡ、S3MⅡ三种芯片接口。
(2)物理层:DP83865芯片集成了PMD子层,功耗低,利用发送器与双绞线直接接触。兼容性高、可编程GMⅡ管脚,支持自动协商及检测。
3.2.2 IO输入输出模块
IO量采集主要由FPGA芯片和电平转换电路实现,通过电平转换电路将地/空信号或28 V/地信号等转换为FPGA可识别的电平信号。IO量输出主要由继电器、FPGA芯片和电平转换电路实现,继电器将输出信号转换为地/空信号或28 V/地信号[4]。
3.2.3 双DSP测试模块
双DSP测试模块由2个DSP芯片和FPGA芯片组成,其中,DSP芯片采用C6714,DSP1作为工作通道接收数据并输出IO量,DSP2作为监控通道完成输出信号回采并监控运行状态,利用双口RAM实现信息共享,利用硬线连接实现时钟同步。
3.3 软件设计与实现
分布式测试系统的软件部分主要包括分布式测试控制中心以及分布式测试节点2部分,机载数据总线分布式测试系统属于大型测试系统,要求系统实时性高、移植性好。因此选用Delphi开发平台,利用其VCL应用框架实现编译及连接速度的提升。
3.3.1 分布式控制中心
分布式控制中心需同时处理多项事务,因此需创建多线程,利用Delphi总VCL线程类TThread进行创建,利用线程函数Execute作为派生出来的抽象方法,利用Synchronize方法实现同步操作。分布式控制中心采用SQL数据库,通过ADO组件实现操作,利用ADOConnection实现数据库连接,利用ADOQuery实现数据库的增删改查操作[5]。分布式控制中心的软件部分主要实现功能测试和系统维护,功能测试包括各类设备的测试参数配置,采集性能数据与标准范围比较,解析采集到的数据判断是否存在故障,可视化展示状态信息以及数据结果;系统维护包括用户管理以及操作日志记录。
3.3.2 分布式测试节点
分布式测试节点的主要功能是采集控制节点输出的信号,经过各类测试后再将结果返回控制节点,实现闭环管理。工作流程如图3所示。
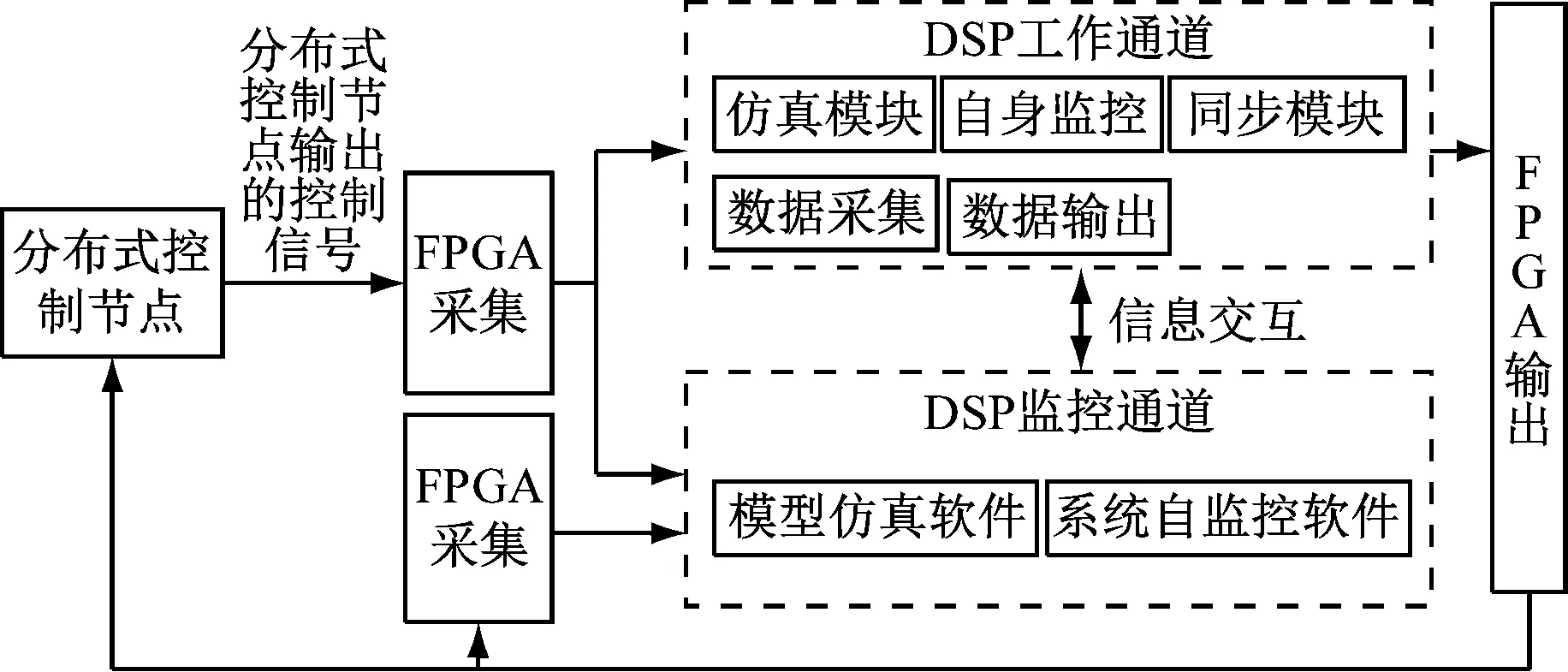
图3 分布式测试节点工作流程
(1)仿真模块:利用实际对象的数学模型,根据控制指令计算仿真结果并输出结果给控制节点。
(2)测试模块:根据控制中心的测试要求判断故障信号的叠加时间及大小。
(3)同步模块:实现2个DSP之间的时钟、周期计数、任务同步。利用GPIO口输出的高低进行判断是否超出同步等待时间。利用双口RAM实现信息写入以及标识位更新,与自身通道的值进行比较,判断是否完成周期计数及任务同步。
(4)自身监控模块:根据仿真模块结果以及FPGA回采数据与自身通道数据进行对比判断通道运行状态。
4 系统应用与测试
为了验证设计的机载数据总线分布式测试系统的实际效果,以电动舵机为例构建仿真模型,利用MATLAB自动生成代码,在Simulink建立模型进行应用测试。
4.1 构建数学模型
设ui代表输入信号,uf代表反馈信号,ei代表误差信号,则伺服放大电路可记作u0=kei,误差信号可记作ei=ui-uf,其中K为放大倍数。
4.2 仿真验证
综合舵机各个模块的数学模型,在Simulink建立仿真模型如图4所示。
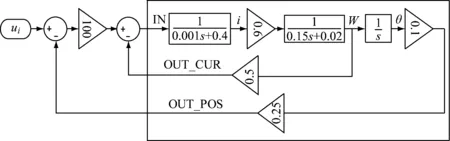
图4 电动舵机仿真模型
其中,IN作为模型的输入,OUT_CUR为仿真得出的电流,OUT_POS为仿真的位置。运行之后得到阶跃响应如图5所示。
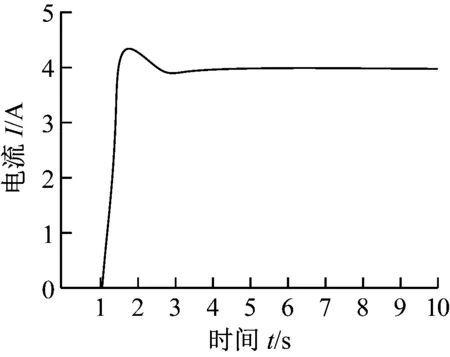
图5 阶跃响应图
4.3 结果分析
根据仿真的阶跃响应图可知系统运行稳定,振荡2次,上升时间为0.48 s,放大倍数达到4 mm/v,超调为15.5%,说明系统可靠性较高且性能优异。
5 总结
结合以太网技术对多种数据总线进行了融合处理,实现机载设备的互联互通,设计的分布式测试系统经过仿真分析证明运行可靠且处理性能优异。但也存在不足之处,机载设备的现场环境复杂,受温度及电磁影响,还应结合其他理论实现降噪处理。另外,系统数据传输过程中还需进一步钻研通信接口,力求提升传输效率增加系统处理实时性。
