基于数字化近景摄影设备的深部裂隙岩体变形测量方法研究
2022-05-11陈晓东冶存玺
陈晓东,冶存玺
(青海地理信息产业发展有限公司,青海西宁 810001)
1 引 言
深部裂隙岩体变形测量是岩体力学、地质学、工程探测学等领域的重要研究课题之一,能够精准、可靠、完整地测量深部裂隙岩体变形的数据,对于研究深部裂隙岩体的稳定性起着至关重要的作用[1]。深部裂隙岩体变形的传统测量方法主要是应用皮尺、罗盘等物理人工手段,这类测量方法不仅效率低,而且无法保障测量相关数据的准确度,浪费时间且消耗人力和物力[2]。
为改进传统测量方法信息数据采集不全面、测量劳动强度大、耗时长等不足[3],本文结合国内外对深部裂隙岩体变形测量的研究现状,应用目前较为先进的数字化近景摄影设备对深部裂隙岩体变形信息进行测量。
运用数字化近景摄影仪器快速采集深部裂隙岩体变形结构信息,并且将所获取的相关信息通过数字化手段传送到相关单位进行结果分析[4]。数字化近景摄影设备具备操作简单、精准度高、安装测量方便等优势,将其应用于深部裂隙岩体的变形数据测量有着广阔的前景。基于此,本文应用免棱镜激光全站仪和数码像机作为数字化近景摄影装备,对深部裂隙岩体变形进行测量[5]。
2 基于数字化近景摄影设备的深部裂隙岩体的信息获取
深部裂隙岩体的结构面物理性质是研究岩体变形信息的重要评估项目,包括岩体变形的级别、岩体变形的参数以及数据仿真技术实施[6]。因此,在进行深部裂隙岩体的变形数据信息测量前,首先需要对深部裂隙岩体的结构面进行信息采集。
本文主要应用免棱镜激光全站仪和数码像机作为数字化近景摄影装备,为了确保数据信息获取的准确性,首先要校验免棱镜激光全站仪,以消除误差[7]。
免棱镜激光全站仪主要运用被测物体的自然光反射的光线进行距离测量,当其接收不到被测物体的自然反射光时,依靠自身的光束进行信息的获取。免棱镜激光全站仪具有光束模块,可以放射出一种与望远镜同轴的红外线激光,这种红外线激光的波段可以调节,随着被测物体的自然光束强弱改变自身光束的强度。
本文采用的免棱镜激光全站仪主要应用反射棱镜对被测物体进行成像,反射棱镜中所成的图像均被放大在人眼的视觉角度,呈现一种放大状态。反射棱镜的成像波长为0.36 μm,成像频率为50 Hz,测量准确度为0.9 m,在应用免棱镜激光全站仪进行数字化近景摄影的有效范围可达100 m[8]。
在被测物体的100 m范围内架设免棱镜激光全站仪与数码像机,分别观测两种不同仪器的视角用于确定深部裂隙岩体的结构[9]。免棱镜激光全站仪的工作原理如图1所示。
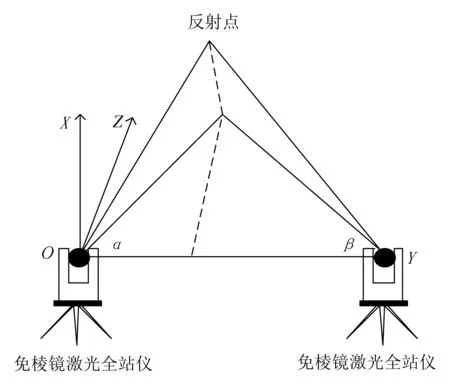
图1 免棱镜激光全站仪的工作原理示意图 Fig.1 Working principle of prism-free laser total station
免棱镜激光全站仪在出厂时已经经过严格的误差校正,但是在应用过程中依然需要进行校验。首先,需要检验仪器的外观是否有异样,例如螺丝松动、水平制动和垂直制动不灵敏、光束旋转轴不光滑等;其次,再检查免棱镜激光全站仪的光束方向是否出现偏差;最后,再进行测距检查[10]。深部裂隙岩体结构面只需要应用免棱镜激光全站仪在被测物体上建立一个观测点,观测点中所测量出来的距离水平、数值方向的值实现三维坐标运算,运算后的数据经过投影成像形成数据信息,再结合数码像机中所拍摄的图像进一步确定深部裂隙岩体结构面的信息精准度[11]。
设定免棱镜激光全站仪的测量点为O(三维坐标的原点),X轴平行于A、B的水平连线,通过测量点O分别对A、B两点进行连线,分别得出水平方向XA、垂直方向YA、斜距的位置距离ZA,三个方向的位置距离测量公式如下:
XA=SAsinβ·sin∂
YA=SAsinβ·cos∂
ZA=SAcosβ
(1)
式中:SA为斜距,经过免棱镜激光全站仪中读取的不同角度对被测物体进行信息读取,即可获得深部裂隙岩体的结构面信息,将免棱镜激光全站仪与计算机设备相连接,便可以实时上传数据到科研总部[1]。
图2所示为测量公式采用的空间极坐标。
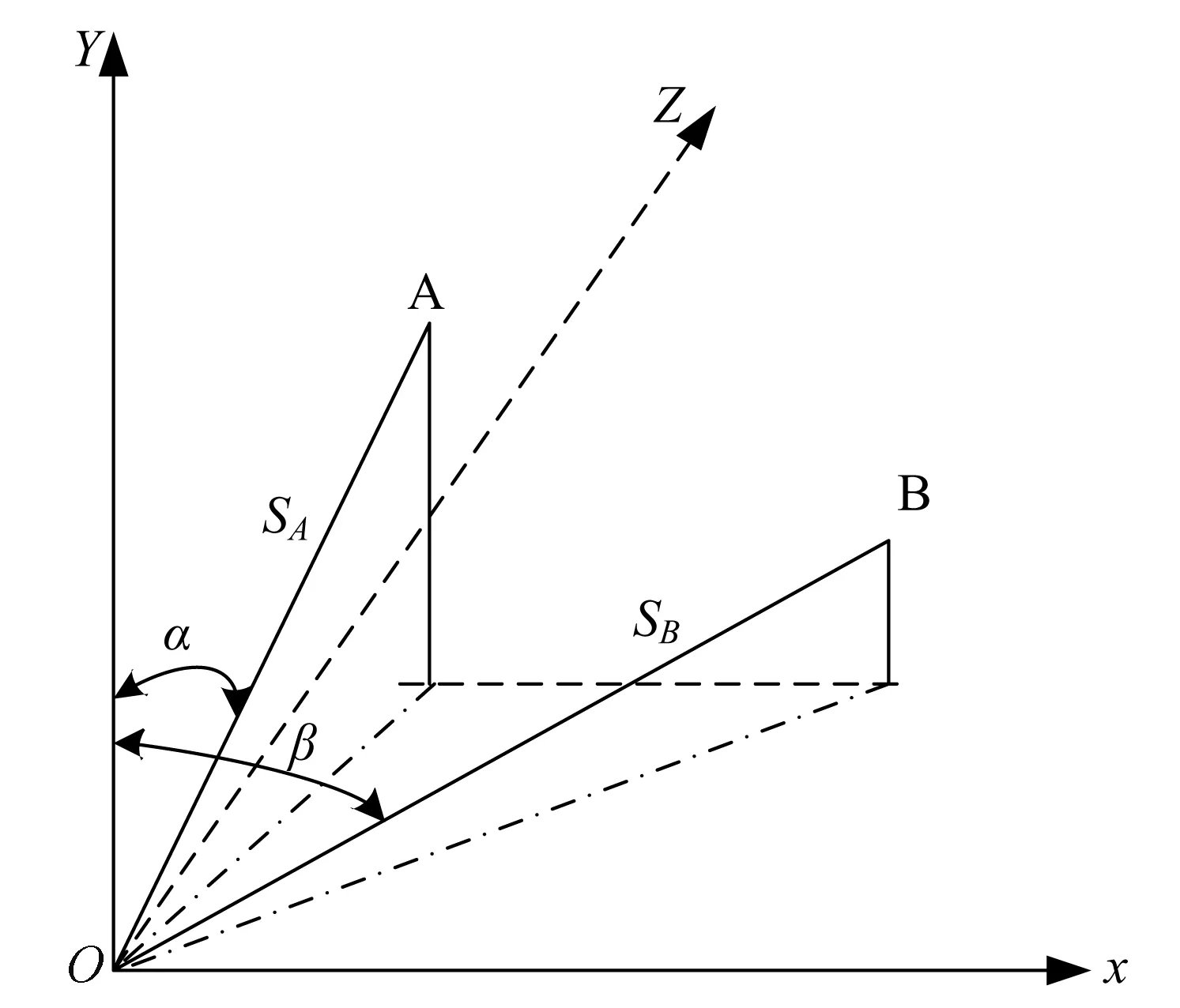
图2 测量公式采用的空间极坐标Fig.2 Space polar coordinates by measurement formula
3 基于数字化近景摄影设备的深部裂隙岩体变形测量
基于获得的深部裂隙岩体结构面的相关测量信息,再次应用数字化近景摄影设备对深部裂隙岩体变形信息进行测量,相关测量流程如图3所示。

图3 基于数字化近景摄影的深部裂隙岩体变形测量流程Fig.3 Deformation measurement process of deep fractured rock mass based on digital close-range photography
应用免棱镜激光全站仪与数码像机对深部裂隙岩体变形进行测量时,为了保障测量数据的可靠性,需要先进行设备控制测量,确保在测量过程中不会因为硬件原因导致测量结果出现误差[12]。免棱镜激光全站仪在测量时需要设置大量的导线节点作为观察路径,主要根据免棱镜激光全站仪的布设位置变化而改变导线节点的控制测量,确保导线节点之间处于互通状态。导线节点可以作为免棱镜激光全站仪的坐标点输入信息计数程序中,在计数程序中具备节点的定位软件,利用定位软件得到导线节点构成的控制网络图,如图4所示(D1~D5分别为导线节点):
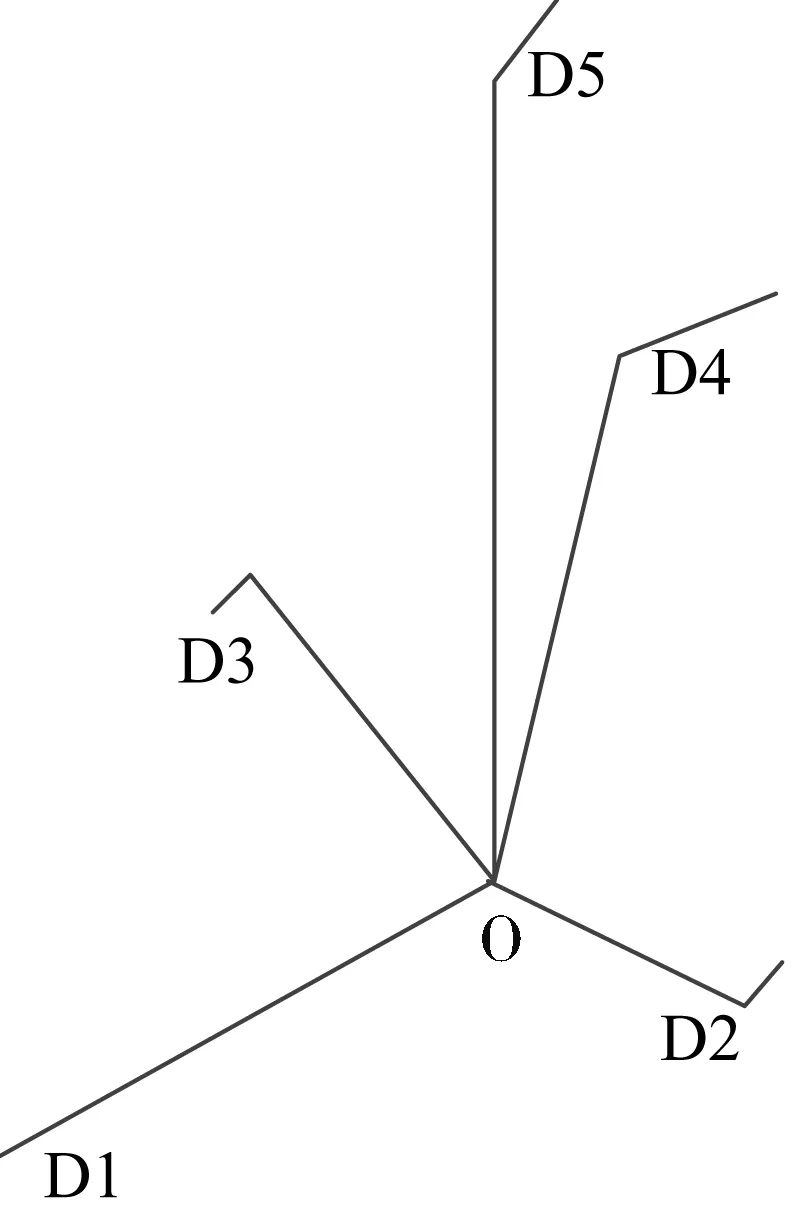
图4 导线节点构成的控制网络图Fig.4 Control network of traverse nodes
根据图4中导线节点的位置,分析免棱镜激光全站仪在被测物体中的位置,即可得到深部裂隙岩体中导线节点的精准坐标点,确保了测量数据的精准度。测得的控制网络导线节点的坐标信息结果如表1所示。
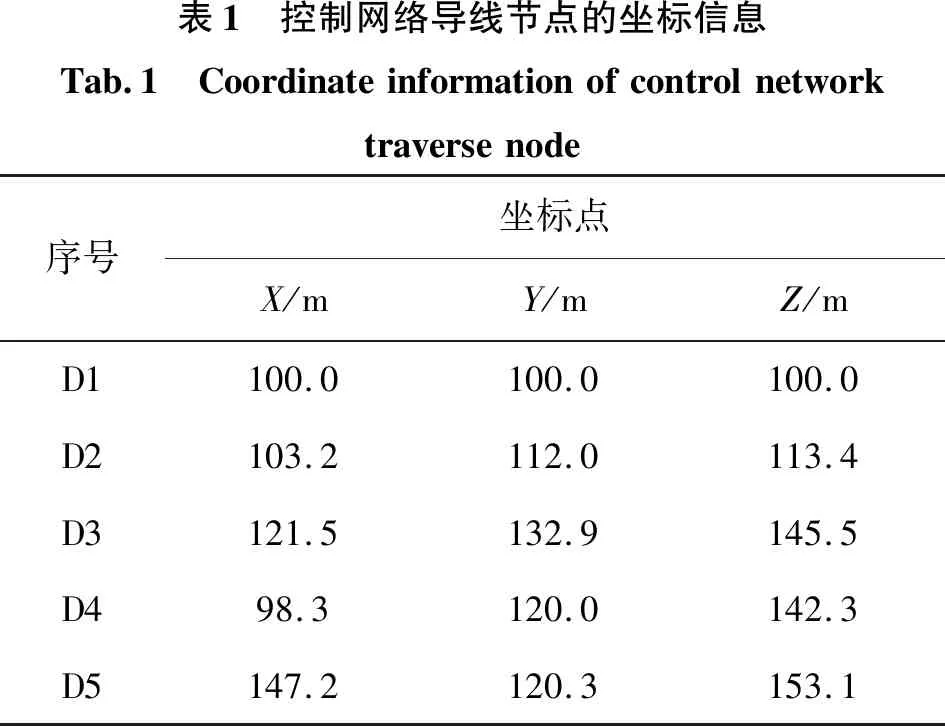
表1 控制网络导线节点的坐标信息Tab.1 Coordinateinformationofcontrolnetworktraversenode序号坐标点X/mY/mZ/mD1100.0100.0100.0D2103.2112.0113.4D3121.5132.9145.5D498.3120.0142.3D5147.2120.3153.1
深部裂隙岩体的变化主要是通过裂隙的程度来体现的,采用免棱镜激光全站仪在裂隙岩体中建立空间坐标系,通过裂隙角度测量获得精确值,该数值是深部裂隙岩体变形的重要数据之一[13]。在深部裂隙岩体中,由于空间位置狭小,测量仪器的展放范围有限,为了能够快速精准地测量数据,本文采用免棱镜激光全站仪的测量方向、数码像机拍摄的内容和深部裂隙角度的数值进行深度分析,并限制数据差以获取更加精准的信息。其中深部裂隙岩体的角度数值可以通过平面与直线交错的方式测量,假设深部裂隙岩体的结构面为平面,免棱镜激光全站仪所发射的光束为直线,当直线与平面产生一定的角度时,设直线的方向向量与平面的法向量之间的夹角为β,此时夹角的值始终保持在锐角状态,根据两个向量的夹角余弦坐标表达式可以得出以下公式:
(2)
式中:X、Y、Z分别表示在水平方向、垂直方向和斜距方向的位置,m、n、p分别是各方向对应的向量。当直线与平面垂直时,直线的方向向量与平面的方向向量则处于一种平行状态,得到的测量公式如下:
(3)
根据平面与直线之间的关系和相应的测量公式对参数进行代入计算,得到精准的深部裂隙岩体夹角,直线与平面的夹角关系模拟图如图5所示。

图5 直线与平面的夹角关系Fig.5 Simulation of angle relation between a line and a plane
测量过程中常因为深部裂隙的空间多变性以及狭小性改变免棱镜激光全站仪的工作模式,当免棱镜激光全站仪发出的光束与岩体表面的夹角过小时,免棱镜激光全站仪会出现光束折射的现象,导致仪器设备的成像效果降低,不能将光束信息化处理。为了避免这种情况出现,本文提出的测量方法中应用了夹角限差技术,通过改变免棱镜激光全站仪放射光束的角度与高度分别预测量岩体的结构面,结合预测量的相关数据分析测量角度的差值所带来的最终数据[14]。
数据分析表明,在相同的测量点坐标较接近的情况下,免棱镜激光全站仪发出的光束角度与结构面的角度大于50°,并且两次测量的最终测量角度差在20°内,这20°的测量误差可以归结为测量误差或设备角度原因造成的。根据误差产生的原因,有针对性地分析解决并进行限制,便可以解决误差问题。
仪器的高度和角度不同,与结构面产生的夹角模拟图如图6所示。
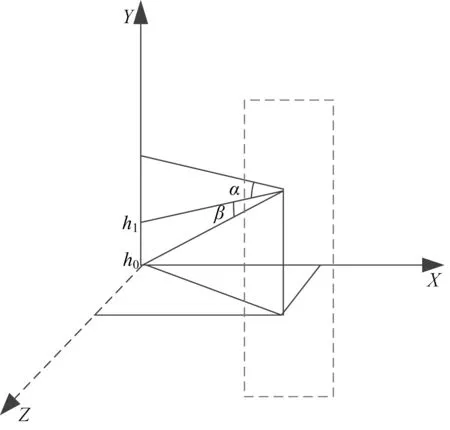
图6 仪器的高度和角度不同与结构面产生的夹角Fig.6 Angle between and the height and angle of the instrument and the structural plane
4 试验研究
本文所研究的基于数字化近景摄影设备的深部裂隙岩体变形测量方法主要针对传统方法中测量信息数据准确度低、耗时长、不全面等缺陷做出改进。为了验证本文方法所做出的改进优于传统方法,设计本试验。为了确保试验过程中不出现偶然性,对试验中所应用的设备以及试验场景进行了试验参数设定,相关信息如表2所示。
本试验具体流程如下,首先,选取一处地形突出的深部裂隙岩体变形地形,并在此区域地形中设定成像控点,利用非测量摄影设备进行成像控点的作业,用于检测试验过程的安全性能;其次,在区域地形中建立三维空间坐标系,并建立参数模型作为输出文件,模型中的参数主要包括相关设备的精确度数值、深部裂隙岩体变形准确值和常见误差;最后,将免棱镜激光全站仪进行位置定向,经过操控人员的调整观测再向设备中输入测量程序,设备定向后需要建立离散点对三维空间坐标系进行编辑生成数据表[15]。为了突出本文方法的优势,在试验区域内共设定6个免棱镜激光全站仪观测站点,对免棱镜激光全站仪观测站点的数据进行编辑,生成折线图,并在6个免棱镜激光全站仪中设定两种区域残差,如表3所示。

表2 试验设备参数Tab.2 Parametersofexperimentalequipment设备名称型号工作频率/Hz成像波长/μm摄影范围/m数码像机索尼500.30500免棱镜激光全站仪HG-50y500.360.9
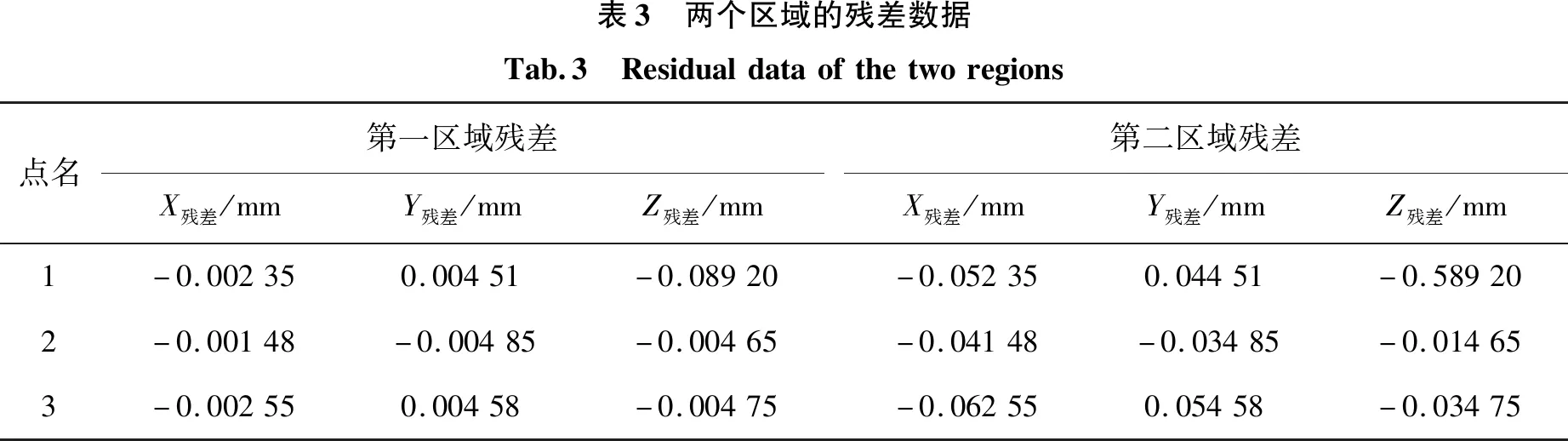
表3 两个区域的残差数据Tab.3 Residualdataofthetworegions点名第一区域残差X残差/mmY残差/mmZ残差/mm第二区域残差X残差/mmY残差/mmZ残差/mm1-0.002350.00451-0.08920-0.052350.04451-0.589202-0.00148-0.00485-0.00465-0.04148-0.03485-0.014653-0.002550.00458-0.00475-0.062550.05458-0.03475
基于两个不同阶段的残差数据,应用本文方法对深部裂隙岩体变形数据进行测量。当采用第一阶段的数据残差时,本文方法的测量结果与传统方法的测量结果对比如图7所示。

图7 第一阶段数据残差下的试验对比Fig.7 Experimental comparison diagram under the first stage data residuals
当采用第二阶段的数据残差时,本文方法的测量结果与传统方法的测量结果对比如图8所示。
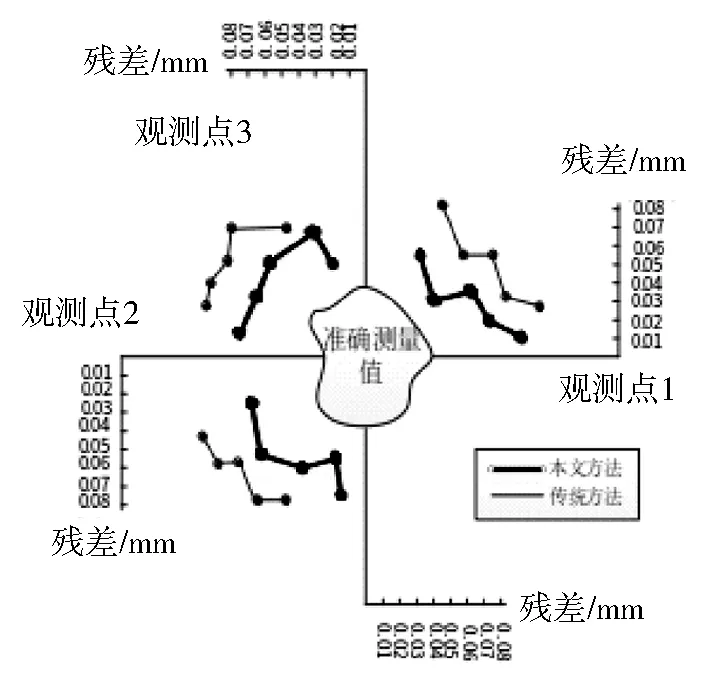
图8 第二阶段数据残差下的试验对比Fig.8 Experimental comparison diagram under the second stage data residuals
从两组对比实验数据的结果可知,本文方法在对深部裂隙岩体变形测量的覆盖程度和效率上主要应用免棱镜激光全站仪与数码像机实现数字化近景摄影,通过数字化技术更加快速地将测量数据进行分析和分享,利用免棱镜激光全站仪应用光束测量传统方法无法达到的位置裂隙,完善并丰富了测量数据。
5 结束语
近景摄影测量设备应用广泛,能全面且快速地实现地形测量。基于此,本文利用免棱镜激光全站仪、数码像机作为近景摄影测量设备,对深部裂隙岩体变形进行测量。首先,应用免棱镜激光全站仪在被测物体上建立一个观测点,通过观测点中所测量的距离、水平,数值方向的值进行三维坐标运算,将运算后的数据经过投影成像形成数据信息;其次,结合数码像机所拍摄的图像进一步确定深部裂隙岩体结构面的信息精准度,以此实现深部裂隙岩体的变形测量。该方法有效解决了深部裂隙岩体变形在不同阶段测量准确率较低的问题。
