基于复合机构的声控姿态变换智能轮椅
2022-05-11李岚涵钱俊泽程林文李涛周敏涛
李岚涵 钱俊泽 程林文 李涛 周敏涛



[摘 要]近年来,我国老龄化趋势日渐严峻,老龄人口中很多都有行走方面的问题。为解决老人行动问题、提高其生活质量,同时随着科学技术的发展,越来越多老人选择使用电动轮椅。而传统的电动轮椅大多数仅具有控制自动移动的功能,其他功能相对欠缺。对此,文中探究基于复合机构的声控姿态变换智能轮椅。
[关键词]智能轮椅;GPS定位;语音控制;多种创新机构融合
[中图分类号]R496 [文献标志码]A [文章编号]2095–6487(2022)03–0–04
Voice-Controlled Posture Transformation Intelligent
Wheelchair Based on Composite Mechanism
Li Lan-han,Qian Jun-ze,Cheng Lin-wen,Li Tao,Zhou Min-tao
[Abstract]In recent years, the aging of our country has become more and more serious, and many of the aging population haVe problems in walking. In order to solVe the mobility problem of the elderly and improVe the quality of life, and with the deVelopment of science and technology, more and more elderly people choose to use electric wheelchairs. Most of the traditional electric wheelchairs only haVe the function of controlling automatic moVement, and other functions are relatiVely lacking.
[Keywords]intelligent wheelchair; GPS positioning; Voice control; integration of Various innoVatiVe institutions
本文主要设计1款增强老年人活动能力的多机构融合的电动智能轮椅。基于机械设计原理、电控技术和人体工程学的轮椅,可实现自动避障、语音控制等智能功能。添加有GPS定位系统,实时反馈使用者的位置信息。合理设计剪叉式升降机构、齿轮齿条展开模式、推杆抬升机构、蜗轮蜗杆按摩机构等创新机构,智能化集成多种用途,可满足多种特殊场景使用需求。
1 概述
我国人口基数巨大,社会老龄化加剧,老年人的出行问题备受关注。由于生理原因,老年人自身不能满足日常生活行动要求,因此需要1款辅助其出行和日常生活的设备。目前市场上的智能轮椅大多仅有控制行驶以及一些附带功能,而在一些特殊场景仍然需要他人辅助,本次研究的重点就是设计1款能够满足老年人日常行动需求以及一些特殊场景使用需求的声控姿态变换智能轮椅。采用多种机械结构复合的设计,以满足不同情况下轮椅的姿态变化和一些辅助功能的执行。同时采用声控、遥控的操作方式以满足不同情况下的操作需求,从而保证老年人能有最佳的使用体验。
2 整体设计
声控姿态变换智能轮椅的机械结构设计采用多种机构复合的方式,将座板展开机构、剪叉架升降机构、背部按摩机构等机构有机结合。座板展开机构与自动循迹相结合,可自动行驶至马桶,展开座板,满足单人场景下不从轮椅上转移位置而实现如厕。剪叉架升降机构可通过剪叉架的伸缩,调整座板的高度,方便从轮椅到床上等不同高度的转移。
电子控制方面,该智能轮椅主要由STM32F103主控板、超声测距模块、GPS定位模块、红外激光测距模块,摇杆控制器等组成。设有多方向的测距传感器,实时测量多个方向与墙面等障碍物的距离,保证距离较近时自动减速或者自动刹车,有效避免移动速度过快带来的碰撞伤害。同时将摇杆键盘控制和语音控制整合在遥控手柄,可实现遥控和语音控制轻松切换。
3 声控姿态变换智能轮椅的机械结构设计
3.1 剪叉架升降机构的设计
如图1所示,为剪叉架升降机构示意图。剪叉架使用了三角形结构,而三角形结构具有稳定性,保证了运行的平稳。该剪叉架升降机构由电动推杆和剪刀架机构组成,剪刀架一端为固定支撑,另一端支撑可在滑轨上移动,配合电动推杆的使用,通过控制电动推杆的伸缩,从而实现剪叉架的抬升与下降,运行稳定且支撑载荷受力简单,应力较低,同时具有结构紧凑、故障率低、维护简单等优点。
3.2 座板展开机构的设计
如图2所示,为座板展开机构示意图。具有如厕功能是笔者所设计的智能轮椅的一大特点。为实现使用者不离开轮椅就可以解决如厕问题,座板展开机构是其中最重要的一部分。座板开合机构采用了齿轮齿条的传动模式,通过齿轮旋转带动齿条双向移动,从而实现座板的开合。座板两端固定于滑轨上,齿条固定于座板上,减小了摩擦阻力,使座板开合时更流畅,开合速度更快,运行更稳定。座板是向两侧开合,无自身设计和人体的阻挡,更加适合于使用者的正常体位。
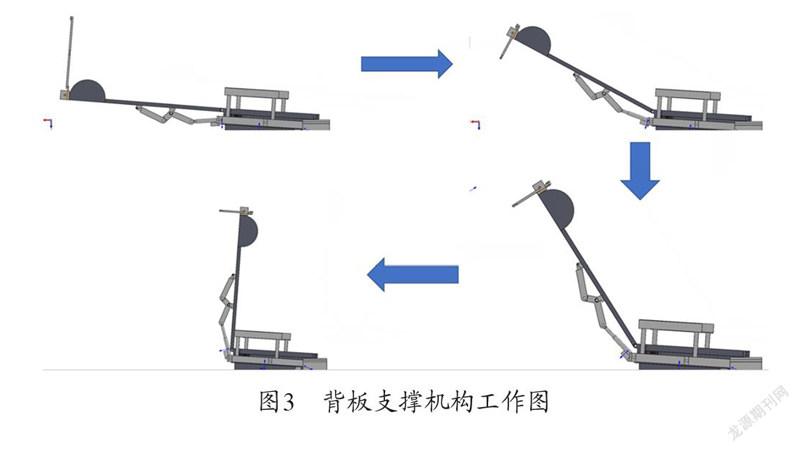
3.3 背板支撐机构的设计
如图3所示,为背板支撑机构示意图,为实现轮椅姿态变换,需要支撑和放下背板,因此设计“L形”杆配合推杆及电动推杆来实现此功能。电动推杆连接座板,伸长推杆带动“L形”杆运动,“L形”杆通过两端铰接传递转矩,使得推杆发力支起背板。放下时,电动推杆收缩,使得“L形”杆方向运动,传递力矩使得推杆有垂直于背板的作用力,让背板放下。此设计可以节省座板下部空间,让动力源小距离移动来实现背板大范围转动,着力点设计恰当时,支撑放下运动平稳,机构简单可靠。
3.4 收纳盒的设计
考虑到老年人经常使用报纸、文具、放大镜等小型杂物,而随身携带的空间极为有限,可以设计1种放置杂物及收纳的盒子。考虑到便于拿取及不影响轮椅通过狭窄空间等多种因素,可以应用四连杆机构的死点特性设计可收缩式收纳盒。收纳盒要求实现收起和放开功能,结构简单,实用性强。基础原理是借助曲柄摇杆机构的应用,两个死点的巧妙运用保证了工作状态和收纳状态的稳定性。当轮椅通过狭窄路况时,可以暂时收起收纳盒,减小轮椅宽度,提高轮椅使用场景的适配性。
3.5 可调写字桌的设计
老年人日常需要用餐,有时也需要桌子摆放书籍、报刊等,为方便使用,而且尽量减小对轮椅其他机构的影响,可以参考飞机公务舱的小桌板设计。设计1个可收缩折叠式写字桌,不仅能够有效节省空间,而且扩展了轮椅的功能性。写字桌结构应用圆形滑轨机构,桌子既可以竖直贴在车轮内侧,也可以展开使用。利用套筒实现上下伸缩功能,调节合适的高度,适应不同老年人的坐姿体态,更加人性化,提高舒适性。
4 声控姿态变换智能轮椅的电子控制
4.1 主控板的选择
笔者所研究的智能轮椅主控制器采用的是STM32F103ZET6单片机,其内核为ARM公司Cortex-M3,最高时钟频率为72 MHz,ARM内核拥有高速的运算能力及丰富的串口及控制功能,方便外接各类模块,还可利用FLASH来存储系统的一些参数,包括GPS定位经纬度、心率数据、云端下发命令数据等。与传统的通用DSP+单片机+A/D芯片的设计方案相比,STM32F103弥补DSP芯片在资源和控制方面的不足,不仅简单可靠,而且成本低廉。本设计采用的是STM32F103ZET6主控制器,具有2个12位的微秒级的AD转换器、11个定时器,还有丰富的串口资源。该芯片的特点能够满足智能轮椅在电子控制方面的各项需求。
4.2 测距方案的选择
4.2.1 超声波测距
超聲波测距的原理是通过超声波发射器将超声波发送到某1个方向,超声波在发送过程中一旦遇到空气中的障碍将立即被反射回来,在反射回来的阶段,反射波会被超声波接收器在第一时间接收到并且计时将立即被停止。根据时间差t和声速v=340m/s,计算出发射点距离障碍物的距离S=v×t/2,并将测试距离反馈给控制程序。
4.2.2 红外激光测距
红外激光测距模块利用了反射能量法的原理。红外发射电路的红外发光管发出红外光,经障碍物反射后,由红外接收电路的光敏接收管接收前方物体反射光,根据反射光的强弱可以判断物体的距离,该模块根据反射光的强弱产生不同的电压值,该电压值可以被单片机的ADC模拟通道采样传感器采集,根据电压值与距离的特性曲线即可算出发射端与障碍物的距离,该距离为参考距离,实际距离值=(参考距离–0.42)cm,即所测的距离。
4.2.3 测距方案设计
在智能轮椅使用过程中,为保证避免碰撞,需要在前后左右4个方向分别安装1组测距模块,可同时检测4个方向障碍物的距离。并将两种测距方式相结合,使两种测距方式在距离范围、精度上的缺点互相弥补,从而得到精确的距离值,并将距离值反馈给控制芯片,当实际距离小于安全距离时,进行自动降速或刹车。
4.3 摇杆控制
摇杆控制是控制轮椅的基础方式,该控制方式有控制简单、反应迅速的特点。该模块采用5 V供电,原始状态下x,y方向的电压值均为2.5 V,转动摇杆可以使x,y方向的电压值同时在0~5 V变化。x,y方向电压值可被单片机的两个ADC模拟通道采集。根据摇杆的位置与x,y方向的电压值的关系设计出相应的程序,可以实现轮椅按照摇杆的方向移动,例如向前推摇杆,轮椅向前移动。松开摇杆,摇杆自动回到原始位置,轮椅停止移动。
4.4 语音控制
LD3320A语音模块内置1块LD3320芯片,是1个专用于语音识别的芯片,该芯片在设计时注重高效与节能,直接集成了语音识别处理模块和外部电路,如麦克风接口、语音输出接口、AD/DA转换器等,使其可以实现语音识别、声音控制等功能。
该模块内置型号为STC11L16XE单片机,可预先编辑50条指令作为语音命令的候选语音。LD3320语音识别芯片采用的是非特定人语音识别技术,已经可以做到不分年龄、性别和音调特征,只要收到的语音信息能够与语音识别库中的指令匹配,就可以根据指令做出相应的输出反应,其识别效率高达95%。
语音模块收到输入指令后,通过串口输出反馈信号至主控单片机,主控单片机再根据串口输入的反馈信号控制其他电子模块,从而实现对轮椅的控制。
4.5 电机控制与驱动
4.5.1 PID控制原理
PID控制系统对控制偏差e(t)进行比例、积分、微分线性组合,得到输出控制量u(t)再次输入到被控对象中,形成完整的闭环控制。PID控制原理如图4所示。
根据PID控制原理,结合数学公式,PID控制原理公式就,见公式1:
(1)
式中,控制误差e(t)=x(t)-y(t),KP为比例常数,T1为积分系数,TD为微分函数。
PID控制器中,KP、T1、TD调节为PID控制器的核心内容。这3个参数的设定直接影响着PID控制器的控制效果。
4.5.2 PWM电机控制
为实现轮椅的移动,剪叉架的升降,座板的开合,需要单片机控制多个电机的运动。工作过程中,单片机产生占空比受PID算法控制的PWM脉冲,并将该脉冲输入至驱动器,驱动器将输入信号放大为能够驱动电机的信号,从而控制电机的旋转。同时利用光电传感器或者电磁传感器将电机转速转换成脉冲频率反馈到单片机中。单片机根据反馈信息再调节控制信号,形成闭环控制系统,从而保证电机能够匀速稳定的运转,或者按照特定的加速度变速运转。
5 总体使用流程
轮椅上电后单片机自动初始化,并自动检测各个模块的状态信息。自检通过后,通过按键可以选择控制方式。选择摇杆控制的方式后,可通过手柄上的摇杆控制轮椅的运动。选择语音的控制方式后,可通过语音控制轮椅的运动。且设有紧急制动按键,可在紧急情况下实现按下制动。
在各个模块自检通过后,测距模块便开始工作,在任何模式下都会实时反馈距离信息,以保证任何时刻都可根据距离自动避免碰撞风险。在需要如厕时,可控制轮椅行驶至厕所,轮椅自动根据轨迹线行驶到马桶上,再通过按键实现座板打开。
在需要从轮椅转移至床上时,先控制剪叉架升降机构抬升至于床面统一高度后,再自行进行转移。GPS定位模块独立于单片机系统,需要另外接入电源供电,即使轮椅电池没电时也能正常工作,全天实时反馈位置信息。
6 结语
笔者设计的这款声控姿态变换智能轮椅,能实现语音控制和摇杆控制两种方式控制轮椅运动,能够自动制动与紧急制动,有效避免碰撞风险。还具有自动循迹如厕的功能,并且座板可以开合,无需从轮椅上转移;座板高度可调节,方便床椅的转移;GPS实时定位。该智能轮椅运行稳定,使用体验良好。主要适用于老年人以及行动不便的人,能够有效应对日常生活中的一些特殊场景,提升使用者的生活质量。未来也可以根据需要添加一些模块或者传感器,提升轮椅的智能化,给用户更好的使用体验。
参考文献
[1] 万昔源.基于RGB&D传感器的手势与人脸识别智能轮椅控制系统[J].河北软件职业技术学院学报,2021,23(4):11-15.